上次發你的檔案中有以上幾個檔案,我們對這幾個檔案進行詳細的研究,當然理論部分不做介紹了,我們對設計的各個模塊進行介紹,
![]()

其電路結構主要包括鑒相鑒頻器(PFD)、低通濾波器(LPF)、壓控振蕩器(VCO)和分頻器四部份,環路中使用了模擬的巴特沃斯低通濾波器和模擬的壓控振蕩器,在壓控振蕩器的輸出端采用一個轉換器把模擬信號轉換成方波信號,
…鑒相鑒頻器(PFD)
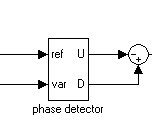
鎖相環中的鑒相器又稱相位檢波器或相敏檢波器,它的作用是檢測輸入信號和輸出信號的相位差,并將檢測出的相位差信號轉換成電壓信號輸出,該信號經低通濾波器濾波后形成壓控振蕩器的控制電壓,對振蕩器輸出信號的頻率實施控制,對輸入信號與環路輸出信號的相位進行比較, 產生誤差控制電壓,鑒相電路通常可以分為模擬電路型和數字電路型兩大類,
在此模擬鎖相環的模型中,鑒相器用一個XOR異或門來實作,因為兩路二進制方波異或的結果,只有完全相同才有0輸出,絲毫的差異就有非0的輸出,差別愈大,輸出的1的個數愈多,異或門的真值表如下所示
| A B | 輸出 |
1 1 | 0 1 1 0 |
對應的simulink模
而這個模塊的內部結構如下所示:
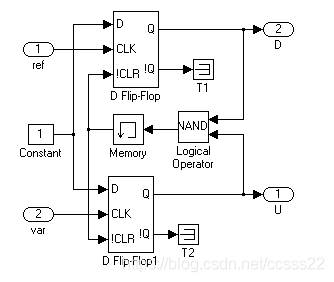
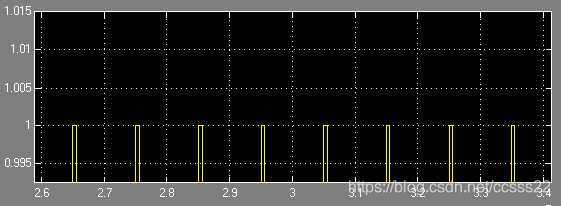
從這里,我們可以看到,其本質上是兩個D觸發器組成的,其功能是一個XOR模塊,其仿真波形如下所示:
…低通環路濾波器(LPF)
在鎖相環路中,環路濾波器的設計是決定鎖相環路特性的重要問題,參考信號和壓控振蕩器的反饋信號經過鑒相器的檢測輸出相位誤差,相位差經過低通濾波器濾除其中的高頻分量和參雜在信號中的噪音,為壓控振蕩器提供控制信號,若環路濾波器的濾波效果不理想,則使鎖相環路產生自激振蕩,由于噪音的干擾,鎖相環路將無法進行鎖定或者鎖定時間變長,對環路濾波器的要求是,在鑒相器的輸出端衰減高頻誤差分量,以提高抗干擾性能;在環路跳出鎖定狀態時,提高環路以短期存盤,并迅速恢復信號,此模型中采用一階巴特沃斯低通濾波器,
本模塊的設計引數如下所示:
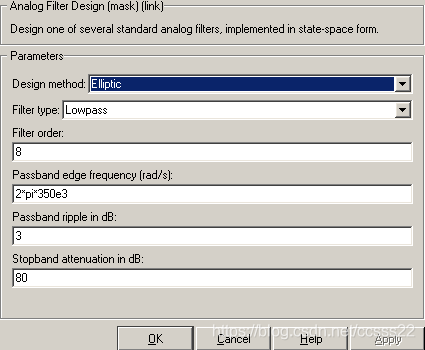
其設計引數分別表示的是濾波器設計方案,濾波器型別,濾波器階數,濾波器的帶通頻率,濾波器的帶寬,濾波器的截止帶寬,
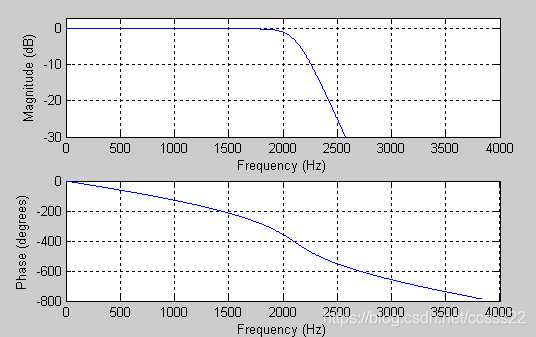
巴特沃斯低通濾波器的頻率回應
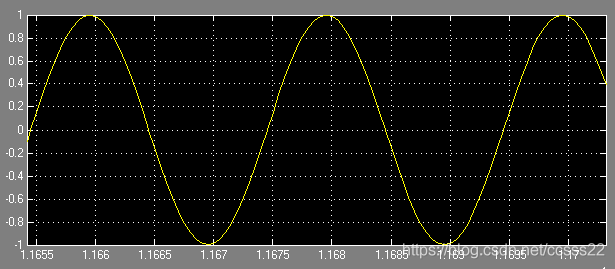
…壓控振蕩器(VCO)
其仿真結果如下所示:
…分頻器
大部分的鎖相環路都會在壓控振蕩器和鑒相鑒頻器之間的反饋回路上包含有分頻器,以便構成頻率合成器,一個可編程的分頻器在無線電傳輸應用中顯得特別有用,因為在傳輸程序中使用的大量頻率可以從一個單一的穩定的,精確的,而且較便宜的晶振得到,一些鎖相環路在參考時鐘和鑒相器的輸入回路之間含有分頻器,如果分頻器的分頻系數為M,則壓控振蕩器的輸出頻率就等于參考頻率乘以N/M,為了使輸入到鎖相環路的信號的頻率較低而在環路中使用分頻器這看起來顯得比較簡單,但是在某些場合當參考頻率受到其它因素限制的時候,分頻器就顯得優為重要,頻率相乘可以通過使鎖相環中鎖定信號的“n”次調諧信號而得到,
整個系統的仿真輸出結果如下所示:

![]()
某些場合對電機調速系統的性能有很高的要求,而基于鎖相環技術的調速控制系統在穩速精度方面有其獨特的優勢.在改進線性鎖相環基礎上,設計一種軟體鎖相環直流電機轉速控制系統,
鎖相環的作業原理,我們在上面已經做了介紹,
我們介紹了鎖相環的傳統結構,但是研究發現,那種結構的鎖相環并不適合電機的精確控制,因為電機的控制涉及到三個類別的誤差信號的判斷,速度誤差信號、速度積分誤差信號,速度重積分誤差這樣,才能做到直流電機速度的精確控制,然后將得到的三路誤差信號相加作為誤差信號并通過環路濾波輸出,在電機控制系統中,鎖相環的VCO結構就是我們直流電機,直流電機的輸出就是作為系統的反饋信號,
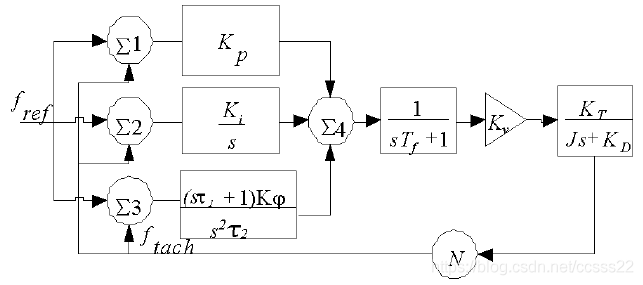
在SIMULINK中,我們建立如下的模型,
每個模塊的引數測驗如下所示:
其中我們所要求的三條支路的具體引數設定如下
這個鎖相環結構比較簡單,但是在電機的控制器中有廣泛的應用,
三條支路仿真如下所示:
![]()
通常,為了更能說明直流電機的本質問題,我們才用的是直流電機的數學模型來研究,一般,我們采用的直流電機的模型如下所示:
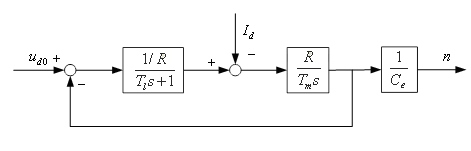
關于直流電機的介紹,您可以查看自己的相關教材,
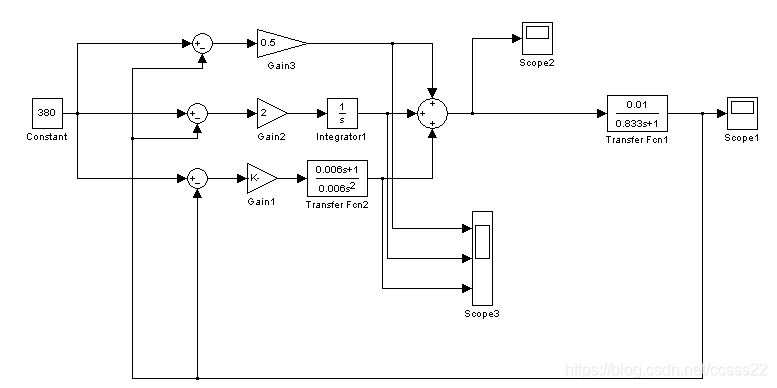
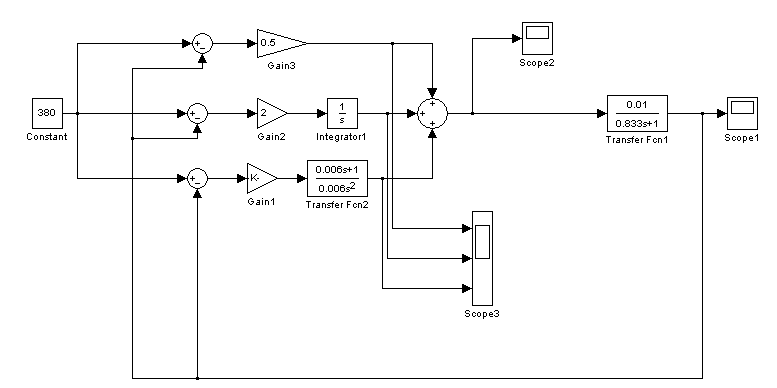
我們在simulink中建模,其模型如下所示:
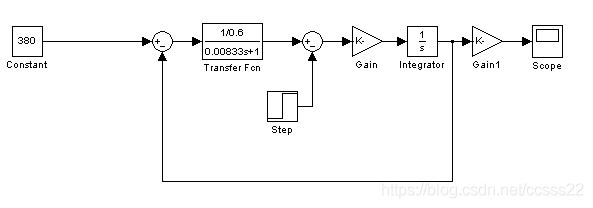
這里通過對比,我們可以看到,
電壓設定為380V,
R=0.6
Tl=0.008333
0~2.5s,電機空載,即Id=0;
2.5s~5s,電機滿載,即Id=110A,
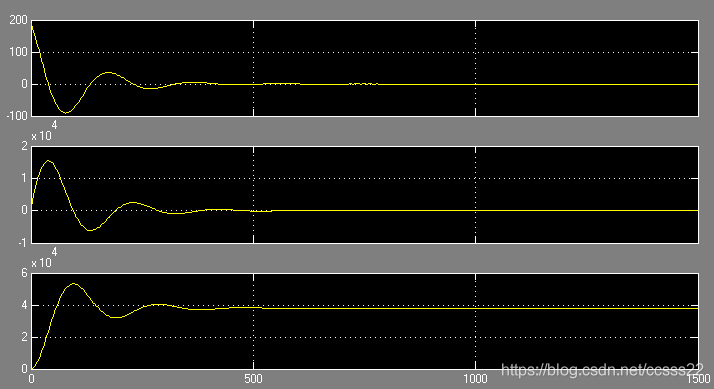
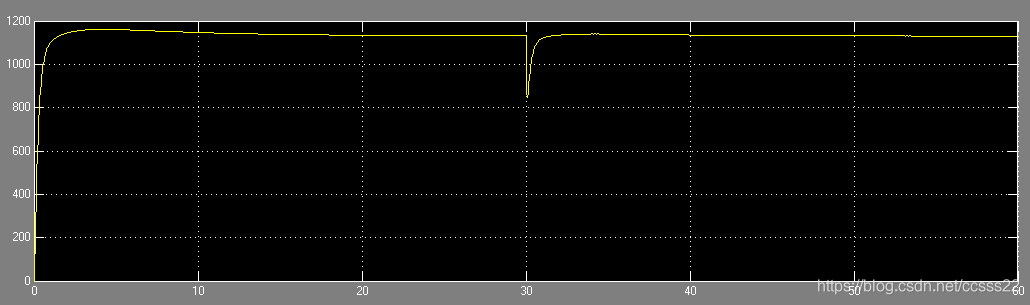
我們通過仿真,可以得到如下的結果:

從上圖我們可以看到電機的幾個轉速指標:
讀圖知:
空載時轉速n=1974.2r/min,
負載時轉速n=1631r/min,
靜差率s=17.384%
這里可以修改輸入的電壓, 以及電機的負載
以及電機的負載 ,從而修改電機的轉速情況,
,從而修改電機的轉速情況,
本課題的主要目的就是通過鎖相環來控制電機的轉速,所以在傳統的直流電機控制模塊換為鎖相環就可以了,此時系統的基本結構如下所示:
而判斷一個鎖相環是否很好的在控制一個電機,就是判斷其是否實作了無靜差調速,即系統的靜差率越小越好,此外還要解決超調量的問題,下面我們將開始設計基于PLL的直流電機控制器的simulink模型,
Simulink模型的基本結構如下所示:
當加入鎖相環控制器的時候,我們還需要了解超調量這個概念,就是控制后,調整程序中最大的值與之后穩定的值的差/穩定值,這個也是一個重要的引數指標,
通過仿真,我們可以看到如下的結果:
這里我們需要調整這三個引數來獲得較好的指標,即最小的靜差率和最小的超調量,
這里其無靜差率,超調量為0.88%,基本符合設計要求,
這里其無靜差率,超調量為0.88%,基本符合設計要求,
這里我們根據之前介紹的,再補充系統的設計說明
倍訓反饋控制系統是按被調量的偏差進行控制的系統,只要被調量出現偏差,它就會自動產生糾正偏差的作用,而轉速降落正是由負載引起的轉速偏差,顯然,倍訓調速系統應該能大大減少轉速降落,
·控制器為比例環節時
Kp值越大,穩定后的轉速n就越大,超調量也越大,靜差率則越小,靜差率反映的是倍訓反饋效果,s越小,倍訓反饋效果則越好,即Kp值越大,倍訓反饋效果則越好,在實際中,我們希望得到的是超調量小(即希望Kp小)和倍訓反饋效果好(即希望Kp大)的系統,但是這二者卻是相互矛盾的,
·控制器為比例積分環節時
超調量和回應時間受Kp、Ki共同控制,在相同Kp下,Ki越大,上升速度越快,回應時間越短,超調量越大;在相同Ki下, Kp越大,上升速度越快,回應時間越短,超調量越大,即Kp*Ki的值越大,上升速度越快,回應時間越短,但是超調量越大(Kp小于1時無超調量),
靜差率在仿真時間內為0,即實作了無靜差調速系統,
當Kp取一定值時,Ki的值在增大到一定程度時,會產生振蕩發散現象,
比較開環系統與倍訓系統知,開環調速系統受到外界的干擾信號影響較倍訓調速系統大;倍訓系統的靜差率比開環系統的小,且帶比例放大器的反饋控制倍訓調速系統是有靜差的調速系統,而采用比例積分調節器的倍訓調速系統則基本上實作了無靜差調速,倍訓反饋效果較好,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/167181.html
標籤:其他