目錄
1 . OTCBVS資料集
Dataset 01: OSU Thermal Pedestrian Database
Dataset 02: IRIS Thermal/Visible Face Database
Dataset 03: OSU Color-Thermal Database
Dataset 04: Terravic Facial IR Database
Dataset 05: Terravic Motion IR Database
Dataset 06: Terravic Weapon IR Database
Dataset 07: CBSR NIR Face Dataset
Dataset 08: Audio-Visual Vehicle (AVV) Dataset
Dataset 09: CSIR-CSIO Moving Object Thermal Infrared Imagery Dataset (MOTIID)
Dataset 10: Pedestrian Infrared/visible Stereo Video Dataset
Dataset 11: Thermal Infrared Video Benchmark for Visual Analysis
Dataset 12: Maritime Imagery in the Visible and Infrared Spectrums
Dataset 13: ContactDB: Analyzing and Predicting Grasp Contact via Thermal Imaging
Dataset 14: DIAST Variability Illuminated Thermal and Visible Ear Image Dataset
2 . KAIST行人資料集
3、FLIR紅外目標識別資料集
1 . OTCBVS資料集
http://vcipl-okstate.org/pbvs/bench/
1、4、5、6、7、9、11是紅外資料集;8有聲音、可見光和EPI,沒有紅外;其他是可見光和紅外資料集
Dataset 01: OSU Thermal Pedestrian Database

Topic of Interest:
Person detection in thermal imagery.
Sensor Details:
Raytheon 300D thermal sensor core
75 mm lens
Camera mounted on rooftop of 8-story building
Gain/focus on manual control
Data Details:
Pedestrian intersection on the Ohio State University campus
Number of sequences = 10
Total number of images = 284
Format of images = 8-bit grayscale bitmap
Image size = 360 x 240 pixels
Sampling rate = non-uniform, less than 30Hz
Environmental information for each sequence provided in subdirectories
Ground truth provided in subdirectories as list of bounding boxes (with approximately same aspect ratio) around people.
For the ground truth data, we selected only those people that were at least 50% visible in the image (i.e., highly occluded people were not selected).
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; J. Davis and M. Keck, "A two-stage approach to person detection in thermal imagery," In Proc. Workshop on Applications of Computer Vision, January 2005 [pdf]
Point-of-contact:
James W. Davis, jwdavis[at]cse.ohio-state.edu
Download:
Click here to download this dataset.
Dataset 02: IRIS Thermal/Visible Face Database

Topic of Interest:
Simultaneously acquired unregistered thermal and visible face images under variable illuminations, expressions, and poses.
Sensor Details:
Thermal - Raytheon Palm-IR-Pro
Visible - Panasonic WV-CP234
Setup: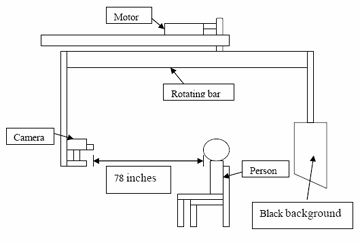
Data Details:
Total size of 1.83 GB
Image size: 320 x 240 pixels (visible and thermal)
4228 pairs of thermal and visible images
176-250 images/person, 11 images per rotation (poses for each expression and each illumination)
30 individuals - Expression, pose, and illumination
Expression: ex1, ex2, ex3 - surprised, laughing, angry (varying poses)
Illumination: Lon (left light on), Ron (right light on), 2on (both lights on), dark (dark room), off (left and right lights off), varying poses
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; DOE University Research Program in Robotics under grant DOE-DE-FG02-86NE37968; DOD/TACOM/NAC/ARC Program under grant R01-1344-18; FAA/NSSA grant R01-1344-48/49; Office of Naval Research under grant #N000143010022.
Point of Contact:
Besma Abidi, besma[at]utk.edu
Download:
Click here to download this dataset.
Dataset 03: OSU Color-Thermal Database


Topic of Interest:
Fusion of color and thermal imagery,
Fusion-based object detection in color and thermal imagery
Sensor Details:
Thermal Sensor: Raytheon PalmIR 250D, 25 mm lens
Color Sensor: Sony TRV87 Handycam
Cameras mounted adjacent to each other on tripod at two locations approximately 3 stories above ground
Gain/focus on manual control
Data Details:
Busy pathway intersections on the Ohio State University campus
Number of color/thermal sequences = 6 (3 at each location)
Total number of images = 17089
Format of images = Thermal: 8-bit grayscale bitmap, Color: 24-bit color bitmap
Image size = 320 x 240 pixels
Sampling rate = approx. 30Hz
Color/Thermal images registered using homography with manually-selected points
Files containing tracking results on the dataset are provided by Alex Leykin
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; J. Davis and V. Sharma, "Background-Subtraction using Contour-based Fusion of Thermal and Visible Imagery," Computer Vision and Image Understanding, Vol 106, No. 2-3, 2007, pp. 162-182.
Point-of-contact:
James W. Davis, jwdavis[at]cse.ohio-state.edu
Download:
Click here to download this dataset.
Dataset 04: Terravic Facial IR Database


Topic of Interest:
Facial analysis with thermal imagery
Sensor Details:
Raytheon L-3 Thermal-Eye 2000AS
Data Details:
Number of thermal sequences = 20
Variations = (front,left,right; indoor/outdoor; glasses, hat)
Format of images = 8-bit grayscale JPEG
Image size = 320 x 240 pixels
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; Roland Miezianko, Terravic Research Infrared Database.
Point-of-contact:
Roland Miezianko, roland[at]terravic.com
Download:
Click here to download this dataset.
Dataset 05: Terravic Motion IR Database


Topic of Interest:
Detection and tracking with thermal imagery
Sensor Details:
Raytheon L-3 Thermal-Eye 2000AS
Data Details:
Number of thermal sequences = 18 (total)
- Outdoor Motion and Tracking Scenarios (11)
- Outdoor House Surveillance (1)
- Indoor Hallway Motion (1)
- Plane Motion and Tracking (1)
- Underwater and Near-Surface Motion (2)
- Uneventful Background Motion (2)
Format of images = 8-bit grayscale JPEG
Image size = 320 x 240 pixels
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; Roland Miezianko, Terravic Research Infrared Database.
Point-of-contact:
Roland Miezianko, roland[at]terravic.com
Download:
Click here to download this dataset.
Dataset 06: Terravic Weapon IR Database


Topic of Interest:
Weapon detection and weapon discharge detection with thermal imagery
Sensor Details:
Raytheon L-3 Thermal-Eye 2000AS
Data Details:
Number of thermal sequences = 5 (total)
- Weapon Presence Detection (1)
- Weapon Discharge Detection (4)
Format of images = 8-bit grayscale JPEG
Image size = 320 x 240 pixels
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; Roland Miezianko, Terravic Research Infrared Database.
Point-of-contact:
Roland Miezianko, roland[at]terravic.com
Download:
Click here to download this dataset.
Dataset 07: CBSR NIR Face Dataset


Topic of Interest:
NIR face detection, NIR eye detection, NIR face recognition
Sensor Details:
The images were taken by an NIR camera with active NIR lighting. More details are available in reference below.
Data Details:
3,940 NIR face images of 197 people.
The image size is 480 by 640 pixels, 8 bit, without compression.
Images are divided into a gallery set and a probe set. In the gallery set, there are 8 images per person. In the probe set, 12 images per person. The image information is provided, which gives the image number, person number, and eye coordinates.
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench; Center for Biometrics and Security Research (CBSR) www.cbsr.ia.ac.cn; AuthenMetric Co. Ltd (Beijing) www.authenmetric.com
Also see:
Stan Z. Li, RuFeng Chu, ShengCai Liao, Lun Zhang, "Illumination Invariant Face Recognition Using Near-infrared Images," IEEE Transactions on Pattern Analysis and Machine Intelligence (Special issue on Biometrics: Progress and Directions), Vol.29, No.4, April 2007, pp. 627-639. [pdf]
Point-of-contact:
Stan Z. Li, szli[at]cbsr.ia.ac.cn, szli[at]nlpr.ia.ac.cn
Download:
Click here to download this dataset.
Dataset 08: Audio-Visual Vehicle (AVV) Dataset

Topic of Interest:
Ground level moving vehicle detection and classification under various challenging conditions (occlusions, motion blur, various perspective views).
Sensor Details:
Standoff long distance Laser Doppler Vibrometer (acoustic), Polytech LDV OFV505, HeNe laser 632 nm.
two PTZ cameras, Canon VC-C50i.
Data Details:
961 sets of multimodal vehicles samples from both a local road (25 meters) and a highway (55 meters) locations.
Each set of sample has three files: an audio clip (mono 22.5kHz, 16 bit), an original image shot, and a reconstructed visual image.
Several main categories, bikes, buses, motocycles, 2-door sedan, 4-door sedans, pickup trucks, regular trucks, mini-vans, regular vans, and mixtures.
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench;
Wang, T. and Zhu, Z. (2012) "Real time vehicle detection and reconstruction for improving classification," IEEE Computer Society's Workshop on Applications of Computer Vision (WACV), January 9-11, 2012, Colorado.
Point-of-contact:
Tao Wang, tao.wang[at]baesystems.com
Zhigang Zhu, zhu[at]cs.ccny.cuny.edu
Download:
Click here to download this dataset.
Dataset 09: CSIR-CSIO Moving Object Thermal Infrared Imagery Dataset (MOTIID)

Topic of Interest:
Moving object (Pedestrian, Vehicle, etc.) detection in thermal infrared imagery
Sensor Details:
The images were taken by a thermal infrared camera. Camera Mounted on tripod at about a height of 4 ft. More details are available in reference below.
Data Details:
Number of thermal sequences = 18
Type of moving targets:
Two different models of 4 wheelers (Ambassador and Innova), a 3 wheeler (Auto-rickshaw), a 2 wheeler (motor cycle) and human (s) walking at different distances, dog strolling and bird flying
Image size = 640 x 480 pixels
Sampling rate = 10Hz
Duration of each thermal video sequence was varying between 4-22 seconds
Each thermal video sequence consists of one or more number moving targets entering and exiting the camera’s field of view.
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench
Akula, A., Ghosh, R., Kumar, S., & Sardana, H. K. (2013). Moving target detection in thermal infrared imagery using spatiotemporal information. JOSA A, 30(8), 1492-1501
Akula, A., Khanna, N., Ghosh, R., Kumar, S., Das, A., & Sardana, H. K. (2014). Adaptive contour-based statistical background subtraction method for moving target detection in infrared video sequences. Infrared Physics & Technology, 63, 103-109.
Point-of-contact:
Aparna Akula, aparna.akula[at]csio.res.in
Download:
Click here to download this dataset.
Dataset 10: Pedestrian Infrared/visible Stereo Video Dataset

Topic of Interest:
Registration of pedestrian at close range in infrared/visible stereo videos
Sensors:
FLIR Thermovision A40M
Sony XCD-710CR
Data Details:
Four infrared-visible video pairs between 100 and 4400 frames (480x360)
206 annotated frames (disparities)
25819 ground-truth point pairs
Foregrounds are provided.
All videos include between 1 to 5 actors walking around and occluding each other
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench
Bilodeau, G.-A., Torabi, A., St-Charles, P.-L., Riahi, D., Thermal-Visible Registration of Human Silhouettes: a Similarity Measure Performance Evaluation, Infrared Physics & Technology, Vol. 64, May 2014, pp. 79-86
Point-of-contact:
Guillaume-Alexandre Bilodeau, gabilodeau[at]polymtl.ca
Download:
Click here to download this dataset.
Dataset 11: Thermal Infrared Video Benchmark for Visual Analysis
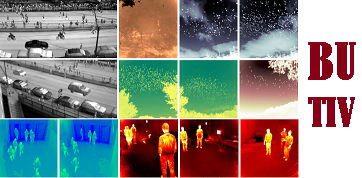
Topic of Interest:
Object detection, counting and tracking with single/multiple views in infrared videos
Sensors:
FLIR SC8000
Data Details:
The benchmark includes over 60k frames, hundreds of annotations and camera calibration files for multi-view geometry. Sequences are designed for testing different vision tasks:
-
Tracking single pedestrian at low resolution. frame size:1024x640
-
Tracking single flying bat at low resolution. frame size:1024x512
-
Tracking multiple objects (pedestrian, car, bicycle, motorcycle). frame size:1024x512
-
Tracking multiple flying bats. frame size:1024x1024
-
Tracking multiple people with planar motion from multiple views. frame size: 512x512
-
Tracking multiple flying bats in 3D from three views. frame size: 640x512
-
Counting flying bats with high density. frame size: 640x512 and 1024x1024
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench
Zheng Wu, Nathan Fuller, Diane Theriault, Margrit Betke, "A Thermal Infrared Video Benchmark for Visual Analysis", in Proceeding of 10th IEEE Workshop on Perception Beyond the Visible Spectrum (PBVS), Columbus, Ohio, USA, 2014.
Point-of-contact:
wuzheng1127 AT gmail.com
Download:
http://csr.bu.edu/BU-TIV/BUTIV.html
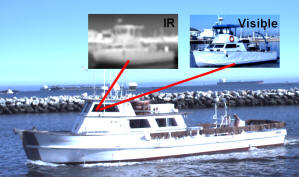
Dataset 12: Maritime Imagery in the Visible and Infrared Spectrums
Topic of Interest:
VAIS contains simultaneously acquired unregistered thermal and visible images of ships acquired from piers. It is suitable for object classification research. See the publication for further details.
Sensor Details:
Visible: ISVI IC-C25, which captures 5,056?,056 bayered color pixel images
Infrared: Sofradir-EC Atom 1024, which captures 1024?68 pixel images
Data Details:
Total IR Images: 1242
Total Visible Images: 1623
Total Images: 2865
Total Pairs: 1088
Number of unique ships: 264
Number of Night IR Images: 154
Number of Basic Categories: 6
Number of Fine-Grained Categories: 15
Requested Citation Acknowledgment:
IEEE OTCBVS WS Series Bench
Zhang, M.M, Choi, J., Daniilidis, K., Wolf, M.T. & Kanan, C. (2015) VAIS: A Dataset for Recognizing Maritime Imagery in the Visible and Infrared Spectrums. In: Proc of the 11th IEEE Workshop on Perception Beyond the Visible Spectrum (PBVS-2015).
Point of contact
Christopher Kanan (kanan AT jpl.nasa.gov)
Michael Wolf (wolf AT jpl.nasa.gov)
Download:
Click here to download this dataset.
Dataset 13: ContactDB: Analyzing and Predicting Grasp Contact via Thermal Imaging
Topic of Interest:
Hand-object contact during grasping of household objects.
Sensor Details:
FLIR Boson 640 Thermal camera + Kinect v2 RGB-D camera
Data Details:
- RGB-D-Thermal scan videos of household objects grasped by human participants
- Each scan video also has an associated textured object mesh where texture indicates contact
- Hand-object contact is revealed by the thermal camera as the thermal imprint left over by heat transfer from hand to object during grasping
- 50 participants x (48 objects grasped w/ 'handoff' intent + 27 objects grasped w/ 'use' intent)
- RGB-D image size: 960x540, Thermal image size: 640x512
Requested Citation Acknowledgment:
IEEE PBVS WS Series Bench
S. Brahmbhatt, C. Ham, CC Kemp and J. Hays, "ContactDB: Analyzing and Predicting Grasp Contact via Thermal Imaging", In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2019. Download
Point of contact
Samarth Brahmbhatt
Download:
Click here to download the dataset.
Click here to download the code.
Dataset 14: DIAST Variability Illuminated Thermal and Visible Ear Image Dataset

Topic of Interest:
Thermal and visible ear recognition. Thermal and visible image fusion.
Sensor Details:
FLIR E60 (both thermal and visible images)
Data Details:
- Grayscale visible and thermal ear image of side face profile form 55 subjects.
- Images were taken in 5 different illuminations (measured using a lux meter) for every subject, measured.
- Illumination ranging between 1 lux and 10700 lux.
- Two snaps of images were taken on every illumination for each side of ear. (10 visible ear images for right ear and 10 visible ear images for left ear).
- Each visible image has a corresponding thermal image (10 thermal images for right ear and 10 thermal images for left ears).
- Each visible image and corresponding thermal image has been manually registered.
- The resolution for all images (visible and thermal) is 125x125 pixel.
- There are total of 2200 image in this database (1100 visible image (550 left and 550 right), 1100 thermal images (550 left, 550 right)).
Requested Citation Acknowledgment:
IEEE PBVS WS Series Bench
S.M.Z.S.Z.Ariffin, N. Jamil & P.N.M.A. Rahman, ?°DIAST Variability Illuminated Thermal and Visible Ear Images Datasets?±, in Proceeding of International Conference on Signal Processing: Algorithms, Architectures, Arrangements, and Applications (SPA), 2016. DOI : 10.1109/SPA.2016.7763611
Point of contact
Syed Mohd Zahid
Download:
Click here to download the dataset.
2 . KAIST行人資料集
KAIST行人資料集總共包括95328張圖片,每張圖片都包含RGB彩色影像和紅外影像兩個版本,總共包含103128個密集注釋,資料集分別在白天和晚上捕獲了包括校園、街道以及鄉下的各種常規交通場景,圖片大小為640×480,資料集總共分為12個檔案夾set00-set11,前6個檔案夾為訓練集包含50187張圖片,后6個檔案夾為測驗集包含45141張圖片,
資料集的標簽中包含person、people和cyclist三個類別,比較好區分的個體則被標注為person,不太好分辨的多個個體則被標注為people,騎行的人則被標注為cyclist,
https://github.com/SoonminHwang/rgbt-ped-detection
3、FLIR紅外目標識別資料集
10k張可將光-紅外影像對,但是沒有對準,進行融合前需校正;
4個種類:訓練集上有person: 22372個, bicycle :3986個, car :41260個, dog :226個;測驗集上有person: 5779個, bicycle :471個, car :5432個, dog :14個
https://pan.baidu.com/s/11GJe4MdM_NH6fuENCQ2MtQ 提取碼:019b
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/172228.html
標籤:其他
上一篇:計算機網路——計算機網路和因特網