在 NVIDIA jetson tx2 上基于 realsense d435i 相機運行 vins 相關配置
- 一、tx2刷機
- 二、安裝librealsense,realsense驅動
- 1.安裝依賴庫
- 2.從debian repository安裝
- 三、安裝 Ros-melodic
- 四、安裝 librealsense-ros
- 五、安裝 vins
在x86上運行vins相對簡單,
網上絕大部分關于在tx2上配置realsense的教程,都需要使用低版本的jetpack在tx2上安裝版本較低的l4t,之后再給內核打補丁并編譯:https://blog.csdn.net/lzw_hdu/article/details/85010619,但是程序比較繁瑣,而且安裝的低版本l4t不知道適用;
有人提出根據板子上已經安裝的l4t版本對內核進行編譯,不需要重裝系統:https://blog.csdn.net/TengYun_zhang/article/details/90452856,嘗試過后發現會產生大量的中間檔案,而且容易損壞內核檔案,導致系統奔潰,不太實用;
后來發現jetson在GitHub上前不久上傳的資源:https://github.com/jetsonhacks/installRealSenseSDK,聲稱不需要編譯內核就可以在tx2上安裝librealsense和驅動,基于 jetpack 4.3 刷機安裝的 l4t 32.3.1,
一、tx2刷機
基于jetpack進行安裝,直接下載最新版本的jetpack:https://developer.nvidia.com/embedded/jetpack,在電腦的ubuntu系統中進行安裝,完成之后進入,大概是這樣的:
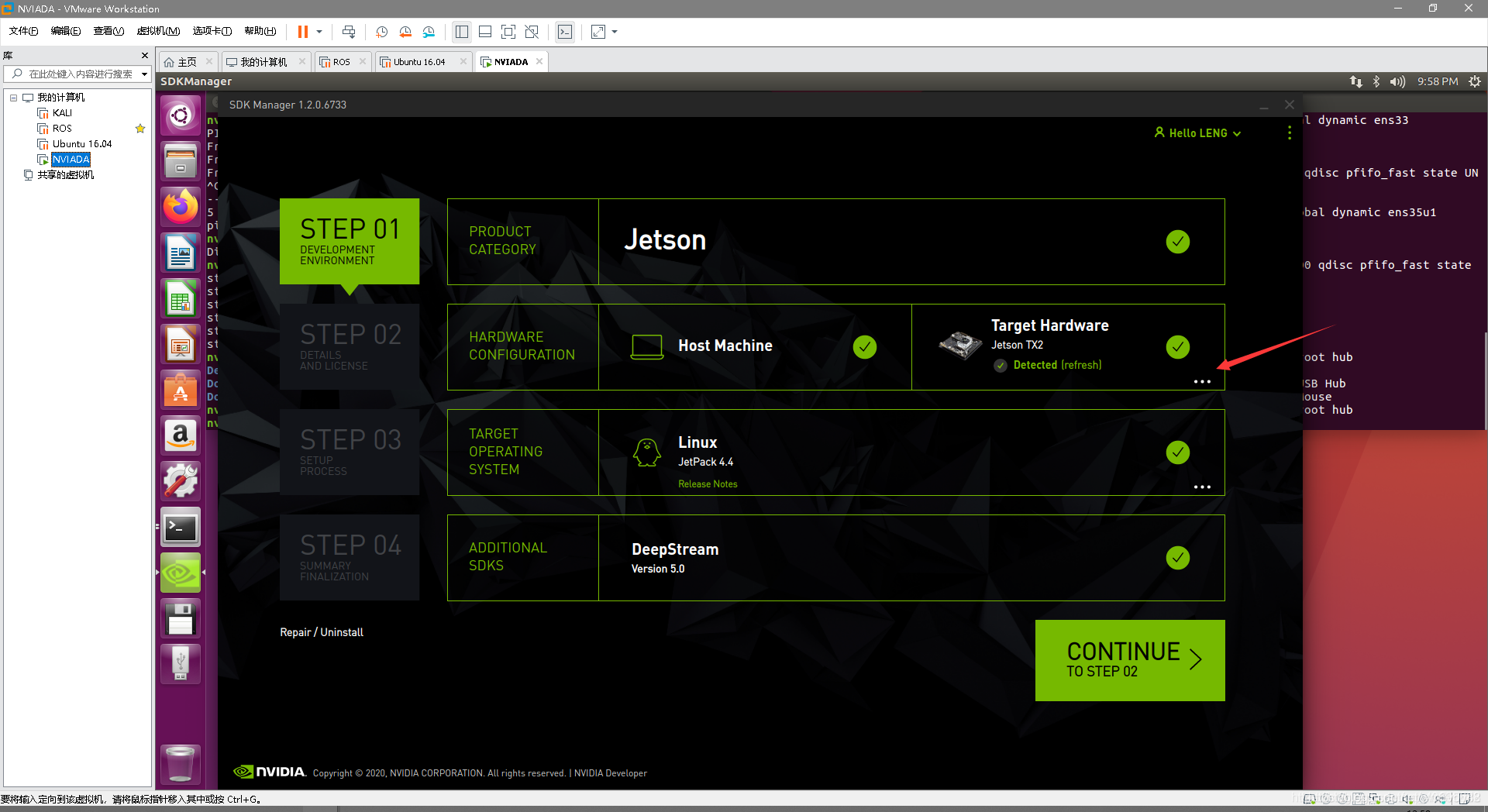
暫時不用連接tx2,host machine 不用勾選,否則耽誤時間,target hardware選擇tx2就行,Linux選擇jetpack 4.3,deep stream看需求,繼續進入第二步,
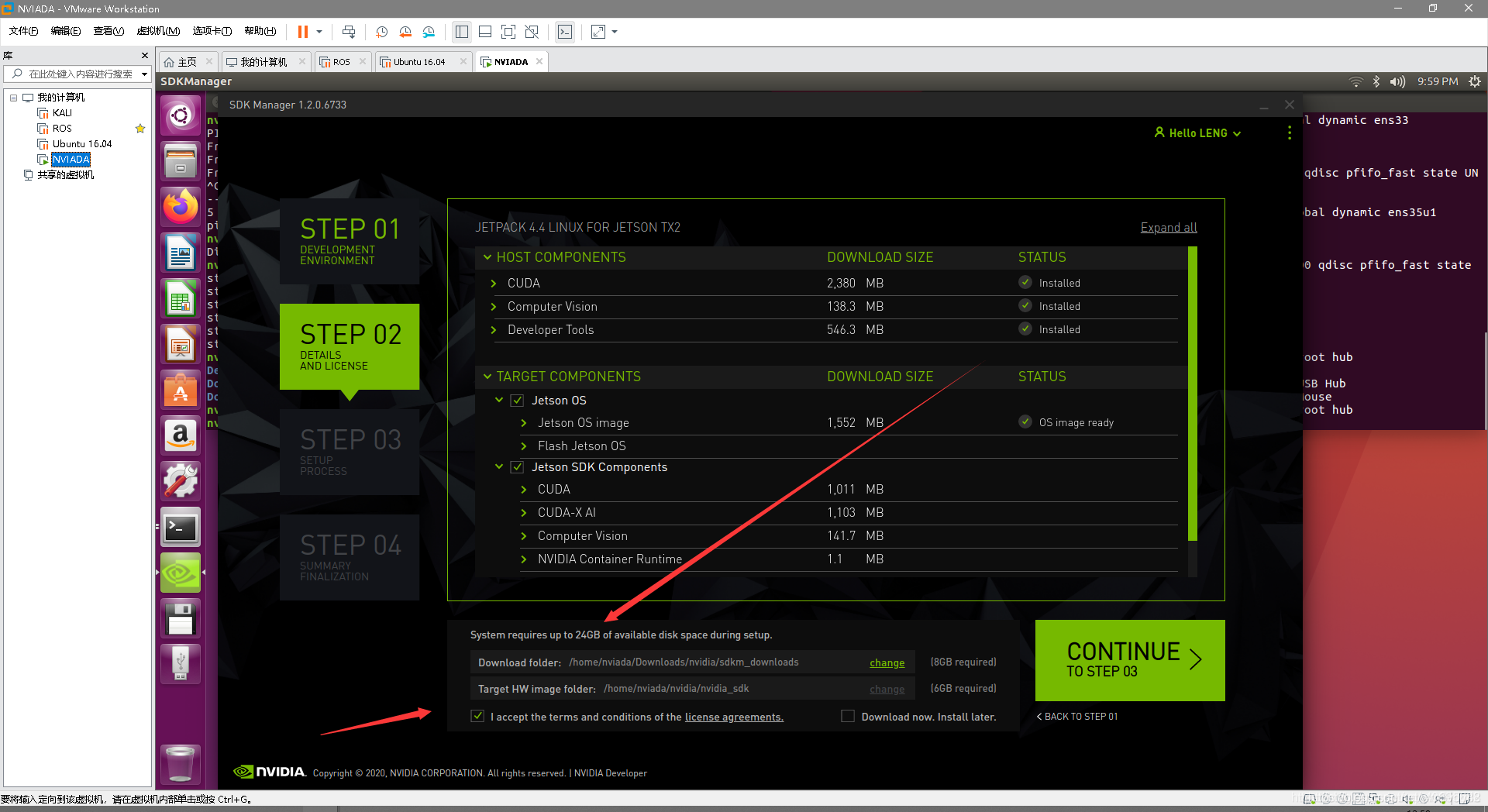 host不選的話不會有上面的host components選項,下面選擇同意和 download now,install later,否則邊下邊安裝容易出問題,繼續進行安裝,如果報錯就重啟,或者換電腦換網路,就瞎碰就行,期間出現問題可以重啟sdk,如果提示sdk內沒有可用配置,可以通過重啟電腦、或者卸載sdk(sudo purge sdkmanager)再安裝(sudo dpkg 安裝包拖過來)多試幾次,
host不選的話不會有上面的host components選項,下面選擇同意和 download now,install later,否則邊下邊安裝容易出問題,繼續進行安裝,如果報錯就重啟,或者換電腦換網路,就瞎碰就行,期間出現問題可以重啟sdk,如果提示sdk內沒有可用配置,可以通過重啟電腦、或者卸載sdk(sudo purge sdkmanager)再安裝(sudo dpkg 安裝包拖過來)多試幾次,
都下載好了就會自動安裝,建議先不連接tx2,直到開始flash,并彈出界面
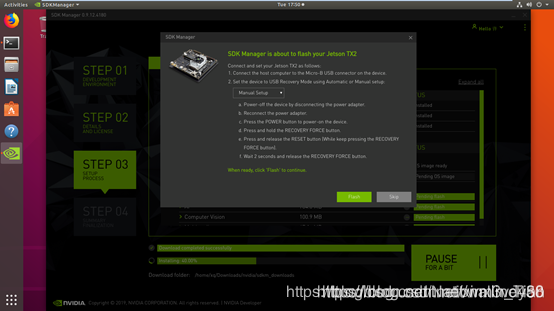
選擇如圖的manual setting,并連接tx2同時使其進入恢復模式:
1.按一下power鍵開機(按下后松開,稍微有一定的按鍵時長)
2.按下REC(RECOVERY FORCE)不要松開
3.再按下RST(reset按下松開,稍微有一定的按鍵時長)
4.REC保持兩秒后松開
可以用lsusb確認是否已連接,之后開始flash;過段時間又會跳出界面
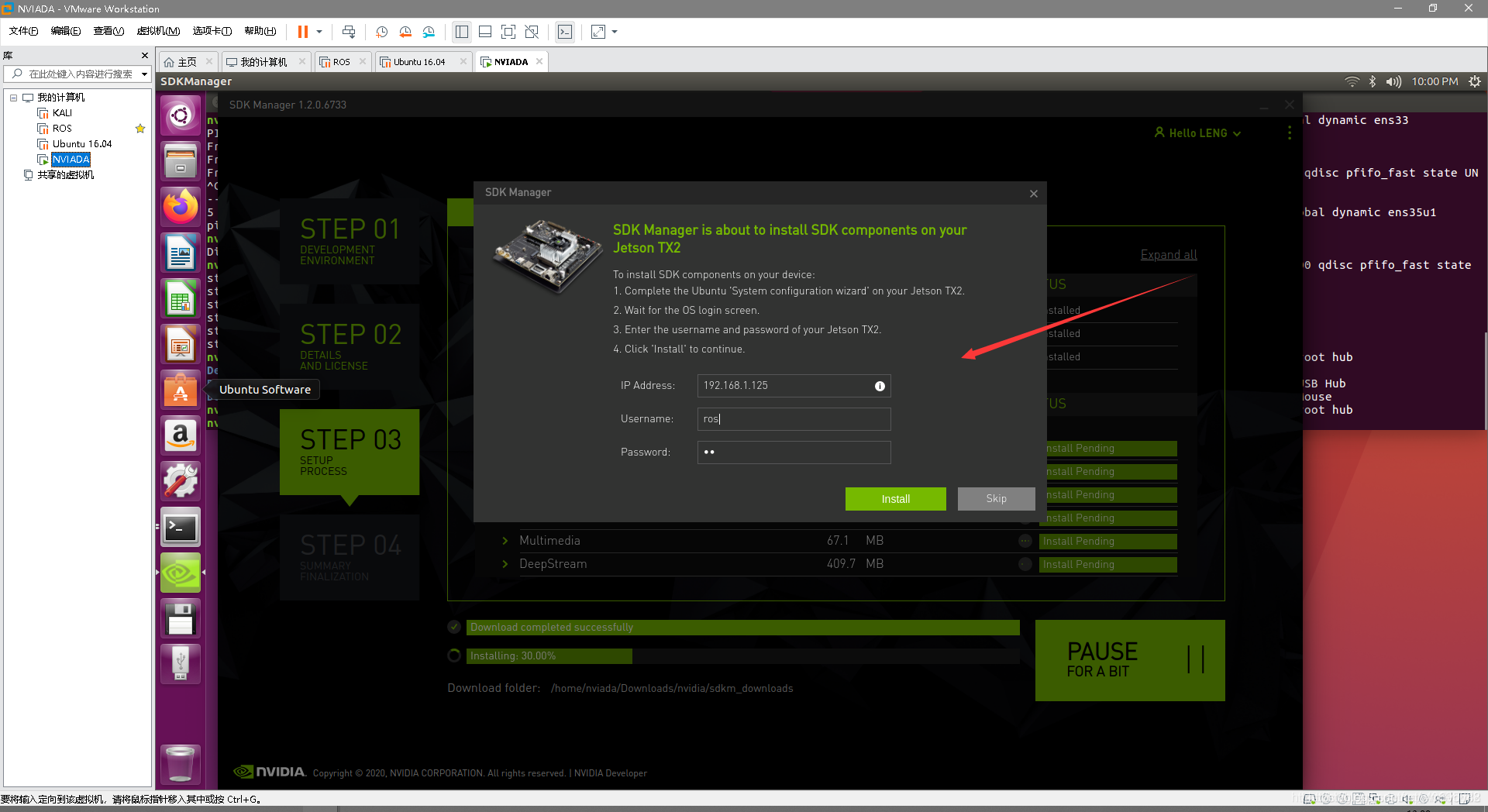
其中ip已經設定好了,username和password要自己設定,先不設定,先用另一臺顯示幕連接tx2,會看到有顯示(但是卡住),直接重啟,開始在tx2上預安裝系統,安步驟進行,期間會要求設定username和password,設定好了再在這個界面上填入相應內容,并一直安裝到結束,結束時可能會提示錯誤,但是基本沒關系,不管他,
這樣jetpack 4.3就安裝完成,
note:建議一開始就卸載opencv4并重新安裝opencv3,省不少事,
二、安裝librealsense,realsense驅動
1.安裝依賴庫
建議先安裝librealsense的依賴庫(不安可不可以未知):
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
其中安裝libgtk-3-dev的時候可能會報錯如下:“libgl1-mesa-dev : 依賴: mesa-common-dev (= 18.0.0~rc5-1ubuntu1) 但是他將不會被安裝”等類似錯誤,網上有建議更換軟體源和安裝所有提示的依賴項,經測驗,不知道是網路原因還是什么,不能在tx2上通過軟體和更新對軟體源進行更換,而且第二種方法一步步走來會直接弄崩系統,建議打開軟體和更新----更新—選上推薦更新:
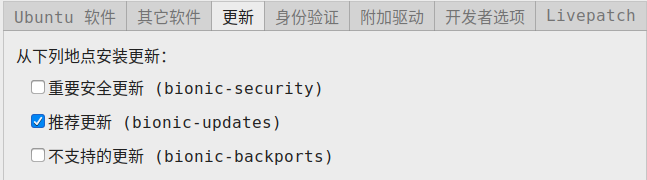
之后再sudo apt update,然后安裝應該就不會出問題了,
2.從debian repository安裝
先在home下直接:
git clone https://github.com/jetsonhacks/installRealSenseSDK.git
再進入檔案夾內,sudo chmod u+x ./installLibrealsense.sh,再運行(建議從repository安裝),另一個腳本的從源檔案安裝,效率比較低,但是應該會多一些相關程式,
之后終端輸入realsense-viewer,連接相機,驗證安裝,
三、安裝 Ros-melodic
由于不太方便更新源,在終端更新源(中科大的):
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
設定密鑰:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
之后安裝
sudo apt-get update
sudo apt-get install ros-melodic-desktop-full
可能會產生和之前同樣的依賴庫問題,相同解法,
之后
sudo apt-get install python-rosinstall
sudo rosdep init
rosdep update
rosdep init 可能會報錯找不到命令,直接 sudo apt install python-rosdep2
rosdep init也可能報錯網路無法連接,方法需要另找,網上很多,
然后加載環境變數source /opt/ros/melodic/setup.bash(建議放在home下的bashrc的最后(control+h顯示)),再roscore驗證,如果報錯找不到指令,直接sudo apt-get install ros-melodic-desktop,就可以了(不要再rosdep了),小烏龜驗證安裝即可,
四、安裝 librealsense-ros
網上有建議https://github.com/jetsonhacks/installRealSense2ROSTX,估計又不兼容,算了,直接安裝這個:
先創建一個ros的作業空間,進入src,然后:
git clone https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd ~/catkin_ws && catkin_make
編譯程序中會報錯cv_bridge找不到opencv位置,這是因為jetpack安裝的最新的opencv4,更換搜索目錄即可,config檔案位于:
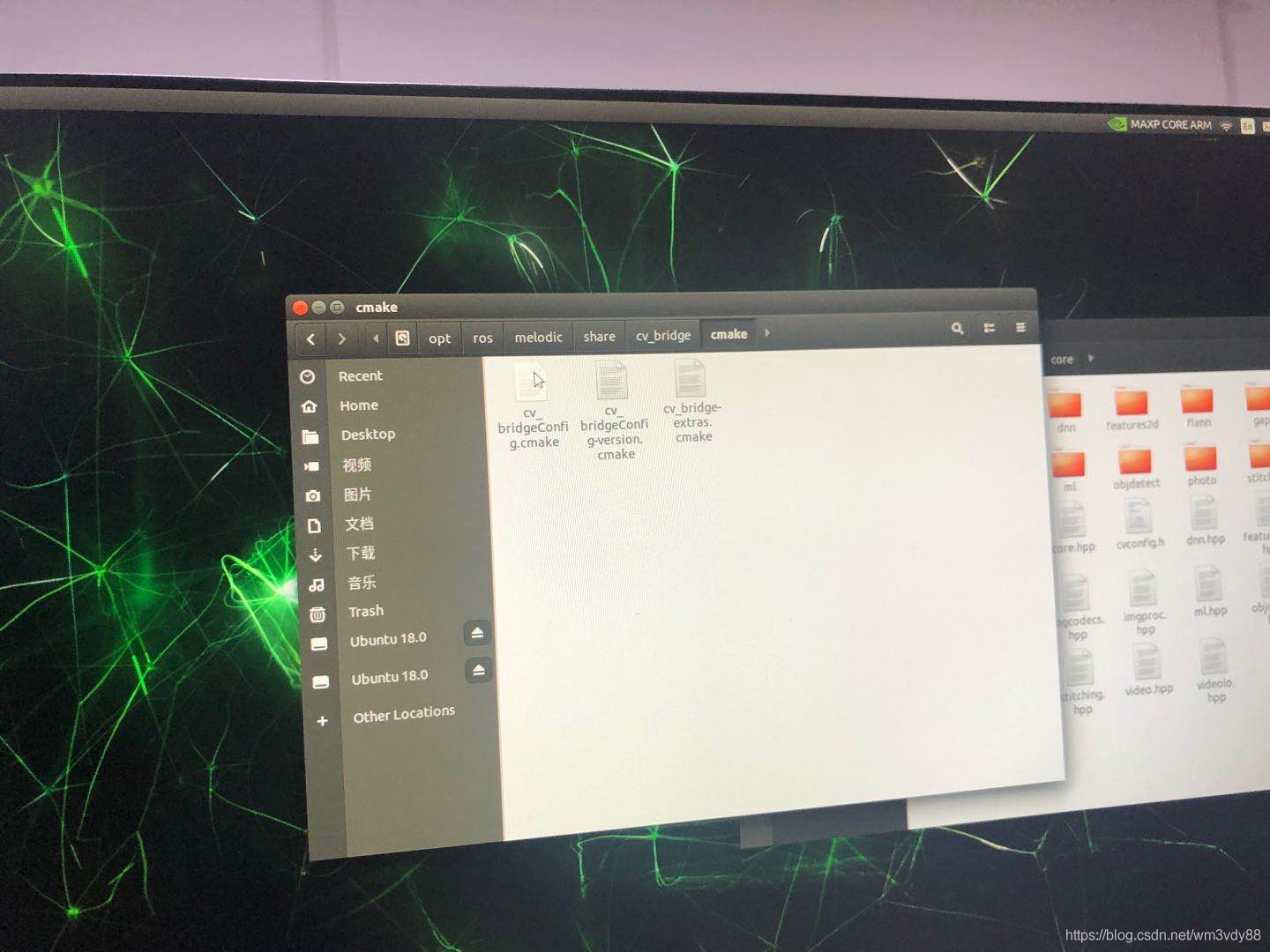
之后報錯librealsense版本不對,這是因為之前安裝的版本和當前ros空間的依賴版本不符,進入當前作業空間中的realsense-ros,由git checkout+需要版本,進行更新,再編譯即可,
roslaunch realsense2_camera rs_camera.launch 結合 rostopic list進行驗證,
五、安裝 vins
先安裝依賴庫ceres,之后再創建ros作業空間并安裝vins,不建議git clone獲得,建議直接從GitHub上下載最新版本進行安裝,安裝程序中可能會報錯:
1.關于未定義的cv變數,可以重新安裝opencv 3.4.11,再在vins里的 findpackge{OpenCv required} 里加上版本號, findpackge{OpenCv 3.4.11 required}(注意大小寫),
findpackage都是找到config.cmake檔案,可見有兩個版本的OpenCV:
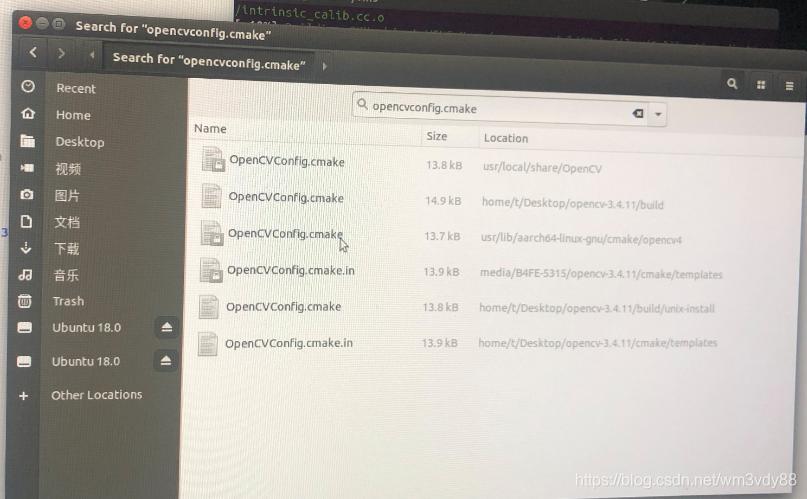
2.關于cv版本沖突,在上述 cv_bridge 里把 opencv 的定位改成當前新安裝的opencv2的位置,
驗證,
note:建議一開始就卸載opencv4并重新安裝opencv3,省不少事,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/185869.html
標籤:其他