準星演算法
知道了準星的變化規律:
1.準星水平位置搖擺角
- 正北是π,逆時針逐漸減小,正南是0,繼續逆時針減小到正北為-π π和-π重疊 (正北方向Y軸逐漸增加,正東方向X軸逐漸增加)
2.準星高度位置俯沖角
- 正上方是0.5π,正下方是-0.5π
我們就要為其寫瞄準的演算法了:
- 假設人物的坐標是:人物.fX,人物.fY,人物.fZ 目標的坐標是:怪物X,怪物Y,怪物Z,
(一)首先我們寫準星水平位置搖擺角 :
-
這個只考慮X,Y的平面即可不存在高度的問題 我們把坐標系分成四個象限來分別計算,
-
理論上是可以統一計算的, 但是我們為了更多沒有數學基礎的同學也能看懂,把其分層四種可能計算更容易理解
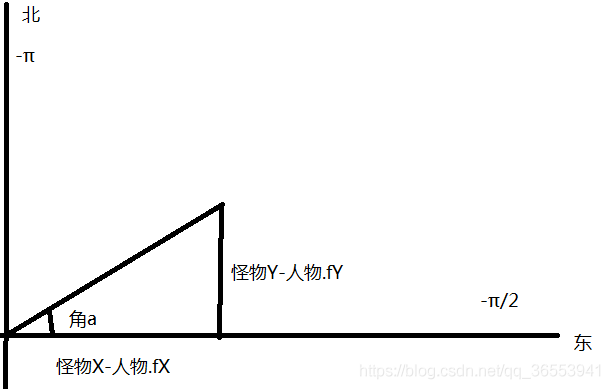
一、如果怪物X > 人物.fX 并且 怪物Y > 人物.fY 那么怪物處在第一象限也就是我們的東北方
-
圖中 角a 根據正切公式 等于 atan2(怪物Y-人物.fY,怪物X-人物.fX) 回傳值為-π到π ,圖中第一象限范圍內 就是回傳值 從 π/2 到 0 ,順時針減少 而我們朝向在第一象限是 -π 到 -π/2 順時針增加的
-
我們要把我們得到的角度換算成他的變化規律 才能正確表示準星位置 所以第一步我們就要對角度取負 讓其變化方向一致 都為順時針增加 - atan2(怪物Y-人物.fY,怪物X-人物.fX) 的變化范圍就成了 -π/2 到 0 順時針增加 但是范圍還是有差別
-
那么第二步,加上偏差的-π/2 使其變化規律相同 - atan2(怪物Y-人物.fY,怪物X-人物.fX) -π/2
-
這樣就可以自動瞄準了,
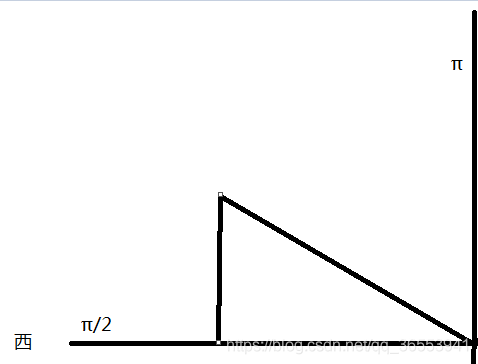
二、如果怪物X < 人物.fX 并且 怪物Y > 人物.fY 那么怪物處在第二象限也就是我們的西北方,
-
角度依然等于 atan2(怪物Y-人物.fY,怪物X-人物.fX)
-
圖中第二象限范圍內 回傳值 從 0 到 π/2 ,順時針增加
-
第一步,和我們的范圍 π/2 到 π 順時針增加 變化方向一致,不需要取負
-
第二步,偏差π/2 加上即可
-
最終 atan2(怪物Y-人物.fY,怪物X-人物.fX)+π/2
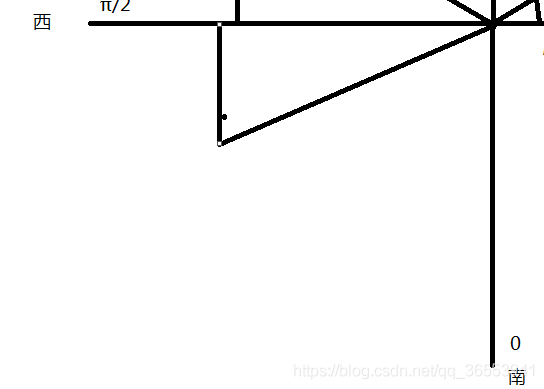
三、如果怪物X < 人物.fX 并且 怪物Y < 人物.fY 那么怪物處在第三象限也就是我們的西南方
-
角度依然等于 atan2(怪物Y-人物.fY,怪物X-人物.fX) 圖中第三象限范圍內 回傳值 從 π/2到0 ,順時針減少
-
第一步,和我們的范圍 0到 π/2 順時針增加 變化方向不一致,取負使其一致 -atan2(怪物Y-人物.fY,怪物X-人物.fX) 變成 -π/2 到0 順時針增加
-
第二步,偏差π/2 加上即可 最終 -atan2(怪物Y-人物.fY,怪物X-人物.fX)+π/2
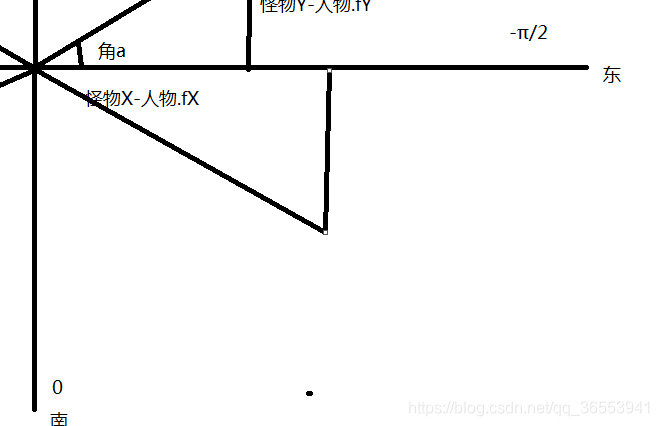
四、如果怪物X > 人物.fX 并且 怪物Y < 人物.fY 那么怪物處在第四象限也就是我們的東南方
-
角度依然等于 atan2(怪物Y-人物.fY,怪物X-人物.fX)
-
圖中第四象限范圍內 回傳值 從 0 到π/2 ,順時針增加
-
第一步,和我們的范圍 -π/2都0 順時針增加 變化方向一致,不用取負
-
第二步,偏差 -π/2 加上即可
-
最終 atan2(怪物Y-人物.fY,怪物X-人物.fX)-π/2
(二)然后我們寫準星高度位置俯沖角
-
道理一樣的 ,不過是分為抬頭還是低頭,不過這次 求正切角度的2個邊不再是 怪物Y-人物.fY 和 怪物X-人物.fX ,而是 怪物Z-人物.fZ 和 水平距離了
-
水平距離 = sqrt((怪物X-人物.fX)(怪物X-人物.fX)+(怪物Y-人物.fY)(怪物Y-人物.fY));
抬頭情況下:
俯視角 = atan2(怪物Z-人物.fZ,水平距離);
低頭情況下:
俯視角 = - atan2(人物.fZ-怪物Z,水平距離);
總結代碼如下:
void Call_自動瞄準(FLOAT 怪物X,FLOAT 怪物Y,FLOAT 怪物Z)
{
T人物屬性 人物;
人物.初始化();
FLOAT 水平角;
if (怪物X > 人物.fX && 怪物Y > 人物.fY)//第一象限
{
水平角=(FLOAT)(- atan2(怪物Y-人物.fY,怪物X-人物.fX)-3.1415926/2);
}
if (怪物X < 人物.fX && 怪物Y > 人物.fY)//第二象限
{
水平角=(FLOAT)(atan2(怪物Y-人物.fY,人物.fX-怪物X)+3.1415926/2);
}
if (怪物X < 人物.fX && 怪物Y < 人物.fY)//第三象限
{
水平角=(FLOAT)(3.1415926/2-atan2(人物.fY-怪物Y,人物.fX-怪物X));
}
if (怪物X > 人物.fX && 怪物Y < 人物.fY)//第四象限
{
水平角=(FLOAT)(atan2(人物.fY-怪物Y,怪物X-人物.fX)-3.1415926/2);
}
FLOAT 俯視角;
FLOAT 水平距離;
水平距離 = sqrt((怪物X-人物.fX)*(怪物X-人物.fX)+(怪物Y-人物.fY)*(怪物Y-人物.fY));
if (怪物Z > 人物.fZ)
{
俯視角 = atan2(怪物Z-人物.fZ,水平距離);
}
if (怪物Z < 人物.fZ)
{
俯視角 = 0 - atan2(人物.fZ-怪物Z,水平距離);
}
DWORD 模塊句柄 = (DWORD)GetModuleHandleA("Crossout.exe");
*(FLOAT*)(模塊句柄 + Base_XY朝向基地址) = 水平角; //計算出來的朝向值 寫入記憶體
*(FLOAT*)(模塊句柄 + Base_Z朝向基地址) = 俯視角; //計算出來的朝向值 寫入記憶體
}
//此公式思路全FPS游戲通用,
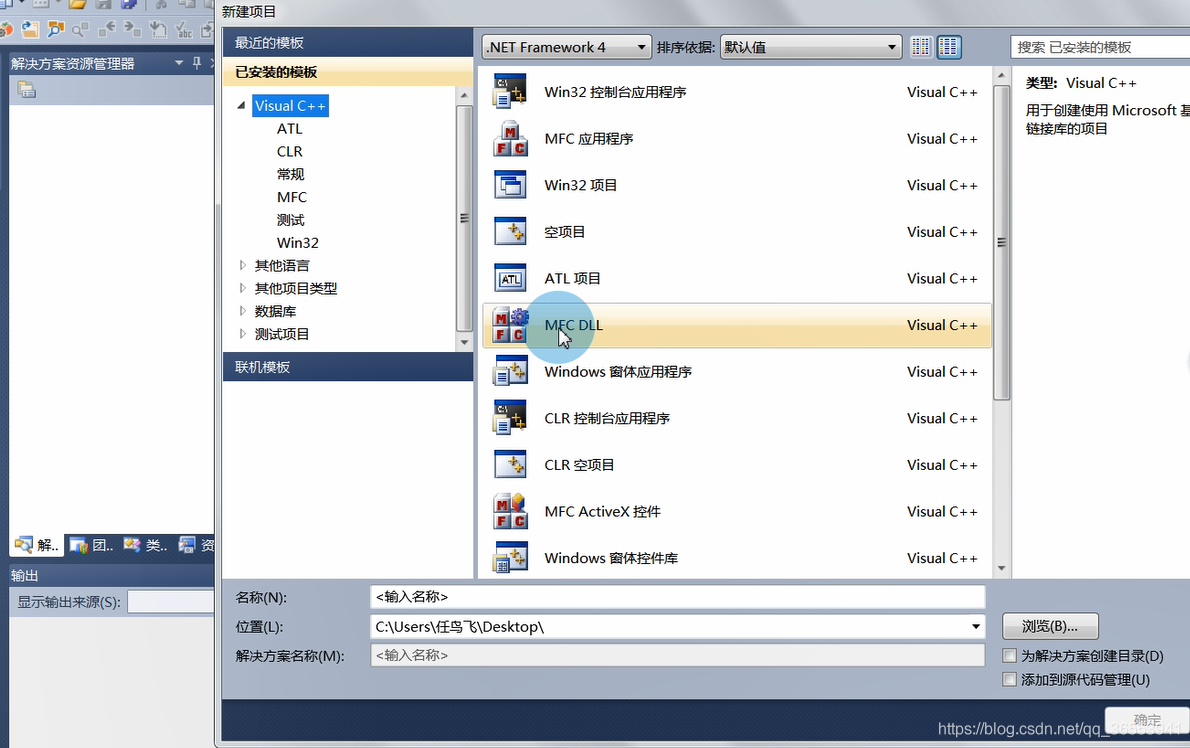
代碼實作自動瞄準
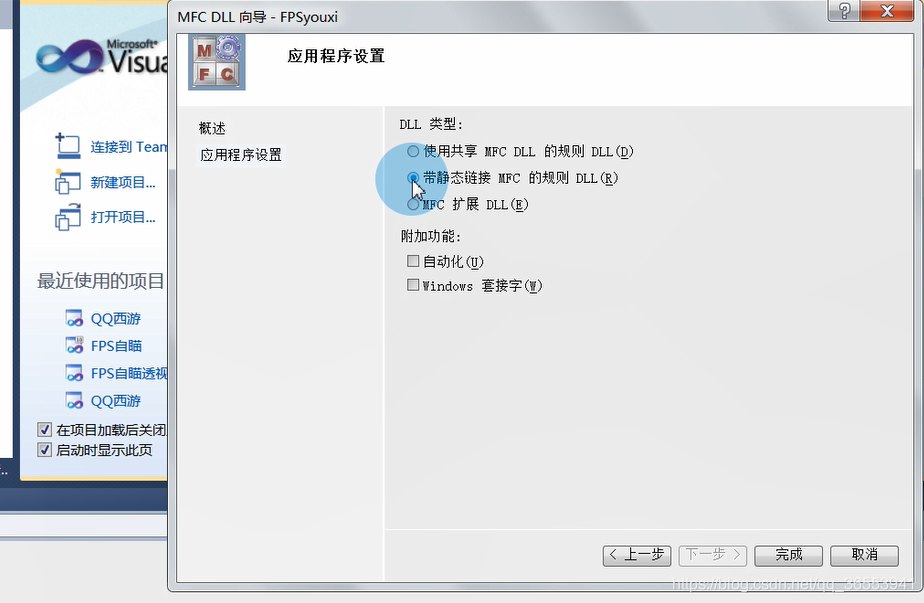
第一步,檔案–新建–專案—MFC DLL–確定
下一步–帶靜態的MFC DLL(其他都不勾選)–完成
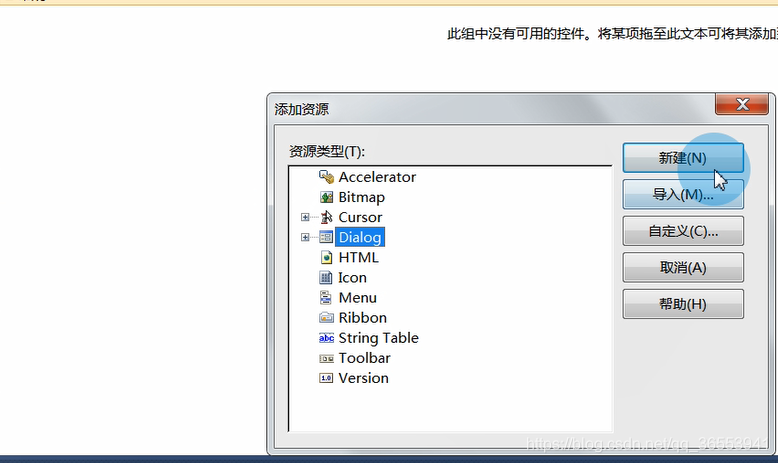
第二步,創建完成以后 資源視圖-- 右鍵–添加–資源–dialog–新建(多余按鈕洗掉掉)
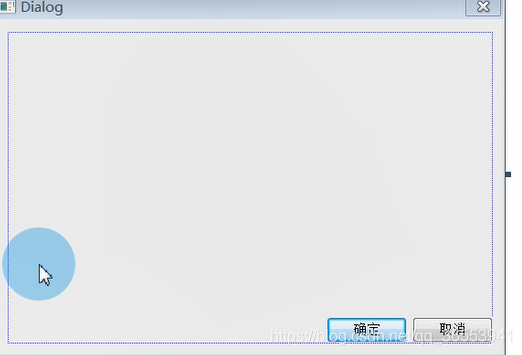
第三步 視窗上右鍵 --添加類-- 類名CFPSDialog–基類選擇 CDialogEx 完成
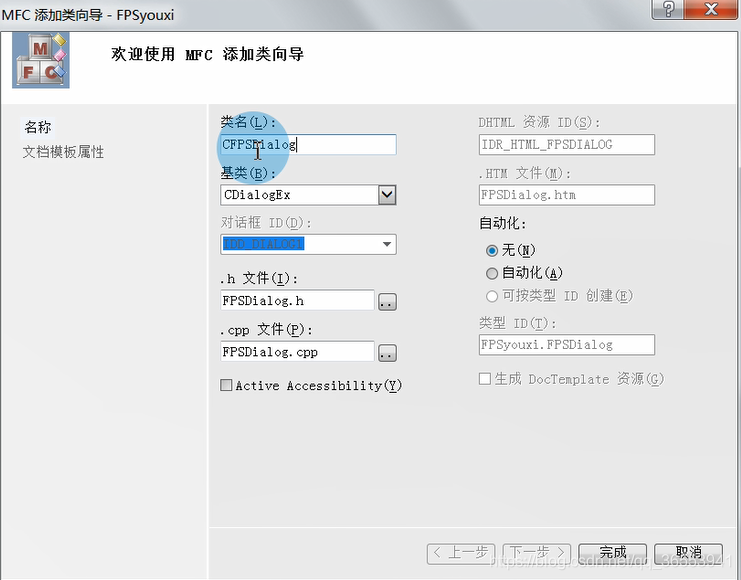
這樣我們就設定完成了,
第四步 到DLL的CPP檔案中 #include “CFPSDialog.h” 因為我們要對視窗進行操作
第五步 我們到DLL初始化的位置加入代碼
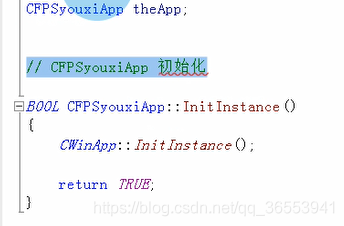
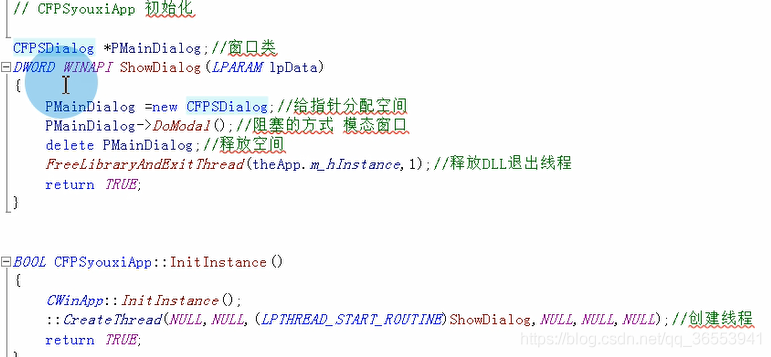
這樣就可以注入游戲顯示視窗,
所有的準備作業都完成了 ,那么我們就可以看看自瞄的代碼是怎么寫了 ,以下代碼全部以中文標注:
- 首先是一個 人物和目標的結構
typedef struct T人物屬性//人物屬性結構
{
char* szpName; DWORD d陣營; FLOAT fHp;
FLOAT fMaxHp; FLOAT fX; FLOAT fY; FLOAT fZ;
FLOAT f準星水平朝向; FLOAT f準星高度朝向;
T人物屬性* 初始化();
}_T人物屬性;
typedef struct T怪物串列
{
T人物屬性 串列[0x500]; DWORD nd數量;
void c初始化();
}_T怪物串列;
- 然后我對結構進行初始化遍歷
T人物屬性*T人物屬性::初始化() //獲得人物資料
{
DWORD 模塊句柄 = (DWORD)GetModuleHandleA("Crossout.exe"); DWORD Base = 0;
try
{
d編號 = *(DWORD*)(模塊句柄 + Base_角色編號);
szpName = (char*)(模塊句柄 + Base_陣營陣列 + d編號*Offset_陣營陣列結構大小 + 0x8);
d陣營 = *(DWORD*)(模塊句柄 + Base_陣營陣列 + d編號*Offset_陣營陣列結構大小 + 0x68);
ID = *(DWORD*)(模塊句柄 + Base_陣營陣列 + d編號*Offset_陣營陣列結構大小 + 0xA0);
f準星水平朝向 = *(FLOAT*)(模塊句柄 + Base_XY朝向基地址); f準星高度朝向 = *(FLOAT*)(模塊句柄 + Base_Z朝向基地址);
Base = *(DWORD*)(模塊句柄 + Base_物件屬性遍歷基地址); ID &= 0x0FFF;
ID += 0x2AAD;
ID *= 0xC;
Base += ID;
Base = *(DWORD*)Base;
Call_輸出除錯資訊("創世戰車 讀取人物物件:%X\r\n",Base);
if (Base!=0)
{
fHp = *(FLOAT*)(Base + 0xC0); fMaxHp = *(FLOAT*)(Base + 0xC4);
fX = *(FLOAT*)(Base + 0x2B0); fZ = *(FLOAT*)(Base + 0x2B4); fY = *(FLOAT*)(Base + 0x2B8);
b死亡標志位 = 1;
}
else
{
fHp = 0;
fMaxHp = 0;
fX = 0;
fY = 0;
fZ = 0;
b死亡標志位 = 0;
}
}
except (1)
{
Call_輸出除錯資訊("創世戰車 讀取人物資訊例外\r\n"); return NULL;
}
return this;
}
void T怪物串列::c初始化() //獲取怪物資料
{
DWORD 模塊句柄 = (DWORD)GetModuleHandleA("Crossout.exe"); DWORD Base = 0;
try
{
for (int i=0;i<32;i++)
{
串列[i].szpName = (char*)(模塊句柄 + Base_陣營陣列 + i*Offset_陣營陣列結構大小 + 0x8);
串列[i].d陣營 = *(DWORD*)(模塊句柄 + Base_陣營陣列 + i*Offset_陣營陣列結構大小 + 0x68);
串列[i].ID = *(DWORD*)(模塊句柄 + Base_陣營陣列 + i*Offset_陣營陣列結構大小 + 0xA0);
Base = *(DWORD*)(模塊句柄 + Base_物件屬性遍歷基地址); 串列[i].ID &= 0x0FFF;
串列[i].ID += 0x2AAD;
串列 [i].ID *= 0xC; Base += 串列[i].ID;
Base = *(DWORD*)Base;
Call_輸出除錯資訊("創世戰車 讀取周圍物件:%X\r\n",Base);
if (Base!=0)
{
串列[i].fHp = *(FLOAT*)(Base + 0xC0);
串列[i].fMaxHp = *(FLOAT*)(Base + 0xC4);
串列[i].fX = *(FLOAT*)(Base + 0x2B0); 串列[i].fZ = *(FLOAT*)(Base + 0x2B4);
串列[i].fY = *(FLOAT*)(Base + 0x2B8); 串列[i].b死亡標志位 = 1;
}
else
{
串列[i].fHp = 0;
串列[i].fMaxHp = 0;
串列[i].fX = 0;
串列[i].fY = 0;
串列[i].fZ = 0;
串列[i].b死亡標志位 = 0;
}
}
}
except (1)
{
Call_輸出除錯資訊("創世戰車 讀取怪物資訊例外\r\n");
}
}
- 篩選出最近的地方目標并把對其進行準星瞄準
void Call_自動瞄準(FLOAT 怪物X,FLOAT 怪物Y,FLOAT 怪物Z)
{
T人物屬性 人物; 人物.初始化(); FLOAT 水平角;
if (怪物X > 人物.fX && 怪物Y > 人物.fY)//第一象限
{
Call_輸出除錯資訊("創世戰車 自瞄進入第一象限\r\n");
水平角=(FLOAT)(0 - atan2(怪物Y-人物.fY,怪物X-人物.fX)-3.1415926/2);
}
if (怪物X < 人物.fX && 怪物Y > 人物.fY)//第二象限
{
Call_輸出除錯資訊("創世戰車 自瞄進入第二象限\r\n");
水平角=(FLOAT)(atan2(怪物Y-人物.fY,人物.fX-怪物X)+3.1415926/2);
}
if (怪物X < 人物.fX && 怪物Y < 人物.fY)//第三象限
{
Call_輸出除錯資訊("創世戰車 自瞄進入第三象限\r\n");
水平角=(FLOAT)(3.1415926/2-atan2(人物.fY-怪物Y,人物.fX-怪物X));
}
if (怪物X > 人物.fX && 怪物Y < 人物.fY)//第四象限
{
Call_輸出除錯資訊("創世戰車 自瞄進入第四象限\r\n");
水平角=(FLOAT)(atan2(人物.fY-怪物Y,怪物X-人物.fX)-3.1415926/2);
}
Call_輸出除錯資訊("創世戰車 自瞄水平角%f\r\n",水平角); FLOAT 俯視角;
FLOAT 水平距離;
水平距離 = sqrt((怪物X-人物.fX)*(怪物X-人物.fX)+(怪物Y-人物.fY)*(怪物Y-人物.fY));
if (怪物Z > 人物.fZ)
{
Call_輸出除錯資訊("創世戰車 自瞄進入抬頭模式\r\n"); 俯視角 = atan2(怪物Z-人物.fZ,水平距離);
}
if (怪物Z < 人物.fZ)
{
Call_輸出除錯資訊("創世戰車 自瞄進入低頭模式\r\n"); 俯視角 = 0 - atan2(人物.fZ-怪物Z,水平距離);
}
Call_輸出除錯資訊("創世戰車 自瞄俯視角%f\r\n",俯視角);
DWORD 模塊句柄 = (DWORD)GetModuleHandleA("Crossout.exe");
*(FLOAT*)(模塊句柄 + Base_XY朝向基地址) = 水平角; //計算出來的朝向值 寫入記憶體
*(FLOAT*)(模塊句柄 + Base_Z朝向基地址) = 俯視角; //計算出來的朝向值 寫入記憶體
}
int Call_自動瞄準最近()
{
T人物屬性 人物; 人物.初始化();
T怪物串列 List;
List.c初始化();
FLOAT 距離 = 222;
FLOAT X;
FLOAT Y;
FLOAT Z;
for (int i=0;i<32;i++) //篩選最近敵人
{
if (List.串列[i].fX > 0.1 || List.串列[i].fX < -0.1)
{
if (sqrt((List.串列[i].fX-人物.fX)*(List.串列[i].fX-人物.fX)+(List.串列[i].fY- 人物.fY)*(List.串列[i].fY-人物.fY))< 距離 && i!=人物.d編號)
{
if (List.串列[i].d陣營 != 人物.d陣營)
{
Call_輸出除錯資訊("創世戰車 找到敵人!\r\n");
距離 = sqrt((List.串列[i].fX-人物.fX)*(List.串列[i].fX-人物.fX)+(List.串列[i].fY-人物.fY)*(List.串列[i].fY-人物.fY));
X = List.串列[i].fX;
Y = List.串列[i].fY;
Z = List.串列[i].fZ;
}
}
}
}
if (距離 < 222) //如果在我們攻擊范圍內才攻擊
{
Call_自動瞄準(X,Y,Z-g_自減高度);
if (g_攻擊標志位 == 0)
{
g_攻擊標志位 = 1;
HANDLE handle_攻擊執行緒=::CreateThread(NULL,NULL, (LPTHREAD_START_ROUTINE)攻擊執行緒,NULL,NULL,NULL);//創建執行緒
CloseHandle(handle_攻擊執行緒);
}
return 1;
}
g_攻擊標志位 = 0;
Sleep(300); // 確保徹底關閉return 0;
}
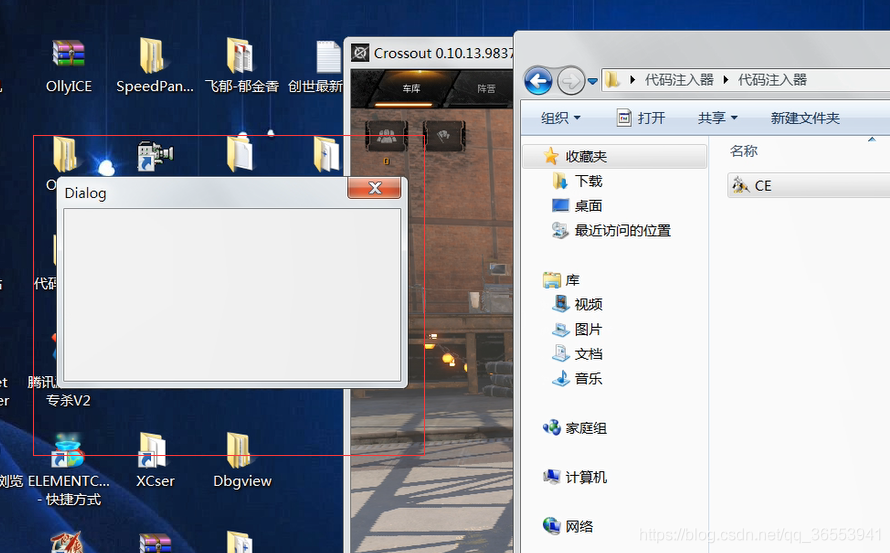
最終實作自瞄效果:
創世某車 快樂游戲
深入學習游戲逆向分析,CSDN學院任鳥飛逆向
課程的內容、價格、售前、售后服務在線客服咨詢
免費0基礎逆向入門課
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/205918.html
標籤:其他
下一篇:C語言—————三子棋游戲