ArduPilot 這么優秀的代碼,提供了一套很方便的SITL仿真開發模式,在git clone代碼的時候,已經將相關的東西下載下來了,問題是如何進行使用,
首先要安裝mavproxy 這個軟體,pymavlink --mavlink封裝的python module,后面也可以采用這個腳本給仿真加上自己的程式,這點和ROS/MAVROS 的模式類似,(ROS是C++編程,多執行緒是沒有問題的,python是偽多執行緒)
其中指令有多點,./sim_vehicle.py --vehicle=ArduCopter --frame=heli --tonealarm --rgbled --console --map --out=172.18.52.221:14550
不過可以采用./sim_vehicle.py --help來進行查詢, 上面的例子是可以將生成的內容通過172.18.52.221的14550埠發送出去,采用的是UDP形式,我這里采用的是在同一個局域網的地面站進行查看的,地面站的操作方法,我在前面的博客中已經提及到了,
我采用的是直升機的仿真,對于直升機而言,在準備好之后需要有一個操作,就是
- rc 8 1000
- rc 3 1000
- arm throttle
- rc 8 1700
- rc 3 1700
這樣就完成了直升機的起飛,當然,也可以采用遠程mission planner來設定航點,讓飛機飛過去,
每次仿真之后會在當前檔案夾下生成一個log檔案,位于log檔案夾下,這個檔案可以通過地面站轉換成matlab可以識別的.mat檔案,然后繪制相應的曲線圖,方便科研,
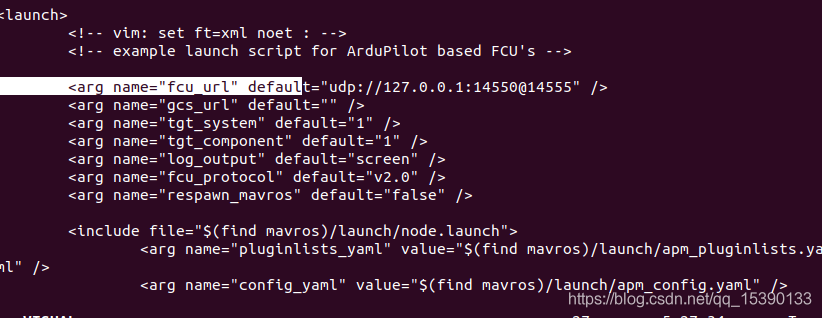
仿真可以通過ros完成無人機的控制,只需要roslaunch在啟動的時候給定埠就可以了,如下圖所示,系結14550埠,
程式部分需要注意是guide模式,然后起飛的時候要先takeoff這點和Px4不同,下面給出示例程式:
#include <ros/ros.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
#include <mavros_msgs/CommandBool.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandTOL.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg)
{
current_state = *msg;
}
geometry_msgs::PoseStamped local_pos;
void pos_cb(const geometry_msgs::PoseStamped::ConstPtr& msg)
{
local_pos = *msg;
}
int main(int argc, char** argv)
{
ros::init(argc,argv,"guided");
ros::NodeHandle nh;
ros::Rate rate(50);
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>("/mavros/state",10,state_cb);
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>("/mavros/set_mode");
ros::ServiceClient arming_clinet = nh.serviceClient<mavros_msgs::CommandBool>("/mavros/cmd/arming");
ros::Publisher pos_pub = nh.advertise<geometry_msgs::PoseStamped>("/mavros/setpoint_position/local",10);
ros::ServiceClient takeoff_client = nh.serviceClient<mavros_msgs::CommandTOL>("/mavros/cmd/takeoff",10);
ros::Subscriber pos_cur_sub = nh.subscribe<geometry_msgs::PoseStamped>("/mavros/local_position/pose",10,pos_cb);
geometry_msgs::PoseStamped pos_des;
pos_des.pose.position.x = 0;
pos_des.pose.position.y = 0;
pos_des.pose.position.z = 20;
mavros_msgs::SetMode guide_mode;
guide_mode.request.custom_mode = "GUIDED";
mavros_msgs::CommandBool arming;
arming.request.value = true;
mavros_msgs::CommandTOL takeoff;
takeoff.request.altitude = 2;
while(ros::ok())
{
if(!current_state.armed )
{
arming_clinet.call(arming);
}
if(current_state.mode != "GUIDED")
{
set_mode_client.call(guide_mode);
}
if(current_state.armed && current_state.mode =="GUIDED" && local_pos.pose.position.z<=1.5 )
{
takeoff_client.call(takeoff);
}
else{
pos_pub.publish(pos_des);
}
ros::spinOnce();
rate.sleep();
}
return 1;
}
之后又采用pymavlink來實作試試,一個簡單的模板如下:
from pymavlink import mavutil
master = mavutil.mavlink_connection('udp:127.0.0.1:{}'.format(14551))
master.wait_heartbeat()
print(master.target_system)
# def change_mode_guided():
# if master.flightmode != 'GUIDED':
# master.set_mode_apm
message = master.recv_match(type='LOCAL_POSITION_NED',blocking=True)
# mavlink(message) is needed!
while True:
master.mav.command_long_send(master.target_system,master.target_component,
176,
0,
1,
4,0,0,0,0,0,force_mavlink1=True)
print(message)
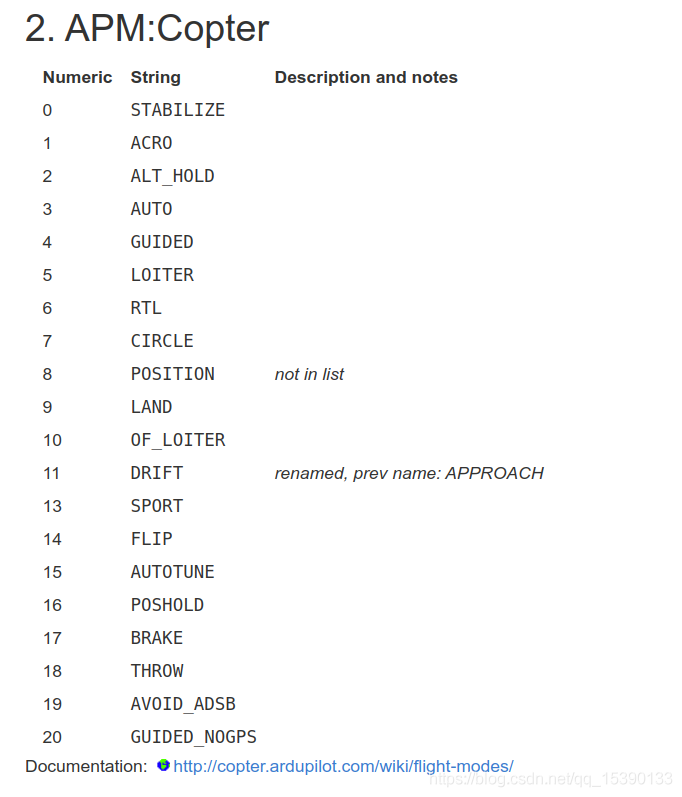
注意這里面的模式切換4, 代表的是guided 模式,1表示的為custom Mode 參考網址
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/224056.html
標籤:其他