體系結構
① 什么是無線傳感器網路?其特點是什么?
無線傳感器網路(Wireless sensor network)是由大量靜止/移動的傳感器以自組織和多跳的方式構成無線網路,目的是協作地探測、處理、傳輸網路覆寫區內感知物件的監測資訊,并報告給用戶,
WSN特征:
------------------四大受限------------------
能量受限:使用電池供電,因需要維持數年生命周期所以需要節能,
通信能力受限:使用 ISM 頻段,帶寬資源十分有限,不能支持很高的資料率,
計算能力受限:傳感器節點需要滿足低成本、低功耗的要求,這就意味著節點計算能力受限,
存盤能力受限:傳感器節點需要滿足低成本的要求,這就意味著存盤空間有限,不能使用像 Windows、Android 這樣的作業系統,
------------------組網特征------------------
大規模:綠野千傳部署了幾千個傳感器節點,
自組織:根據網路狀態自行組網,
拓撲動態性:節點可能會移動、死亡、新加入,
可能存在異構傳感器:為了安防目的,部署了攝像頭、位移傳感器等,
需要資料融合等技術:為了安防目的,需要從攝像頭、位移傳感器等感知資料綜合提取資訊,確定是否有人入侵、身份資訊等,
應用相關性強:在智能交通、安防、環境監測等應用中部署的傳感器各異、服務質量要求各異,
任務/事件驅動,以資料為中心:當檢測有人入侵時,才會向用戶發出警報發送視頻資料,
對可靠性和魯棒性有要求:當火災發生時,煙霧報警器一定要可靠地將報警資料發送出去,
② 傳感器網路的節點由哪些部分組成?這些組成模塊的功能分別是什么?
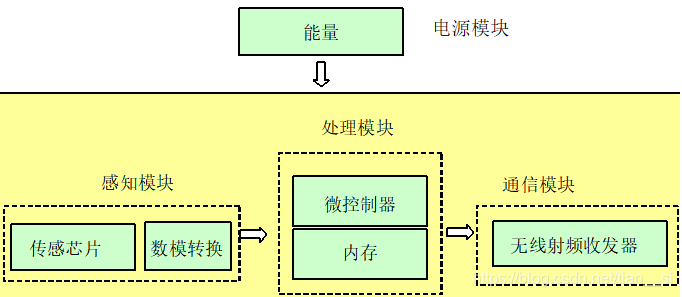
感知模塊:由一個或多個傳感器以及模數轉換器組成,傳感器負責感知監測目標的物理特征和現象,并產生相應的模擬信號;模數轉換器ADC負責將模擬信號轉換為數字信號,并將數字信號送往處理模塊進行處理,
處理模塊:由一個微控制器及相應的記憶體組成,負責對資料進行處理、濾波、決策、執行、資源分配等判斷,并對傳感器節點進行控制,
通信模塊:由數模轉換器和無線收發器組成,負責發送、接收資料和控制資訊,
電源模塊:負責節點的供電,
位置模塊:節點可以配置全球定位系統或北斗定位系統接收器,
移動模塊:在某些需要移動傳感器節點的應用中,可以配置馬達來驅動傳感器節點,
③ 傳感器節點的能量消耗主要在哪些模塊?
感知模塊(采集資料)、處理模塊(CPU運轉)、通信模塊(資料收發、空閑偵聽),其中通信模塊能耗最大,
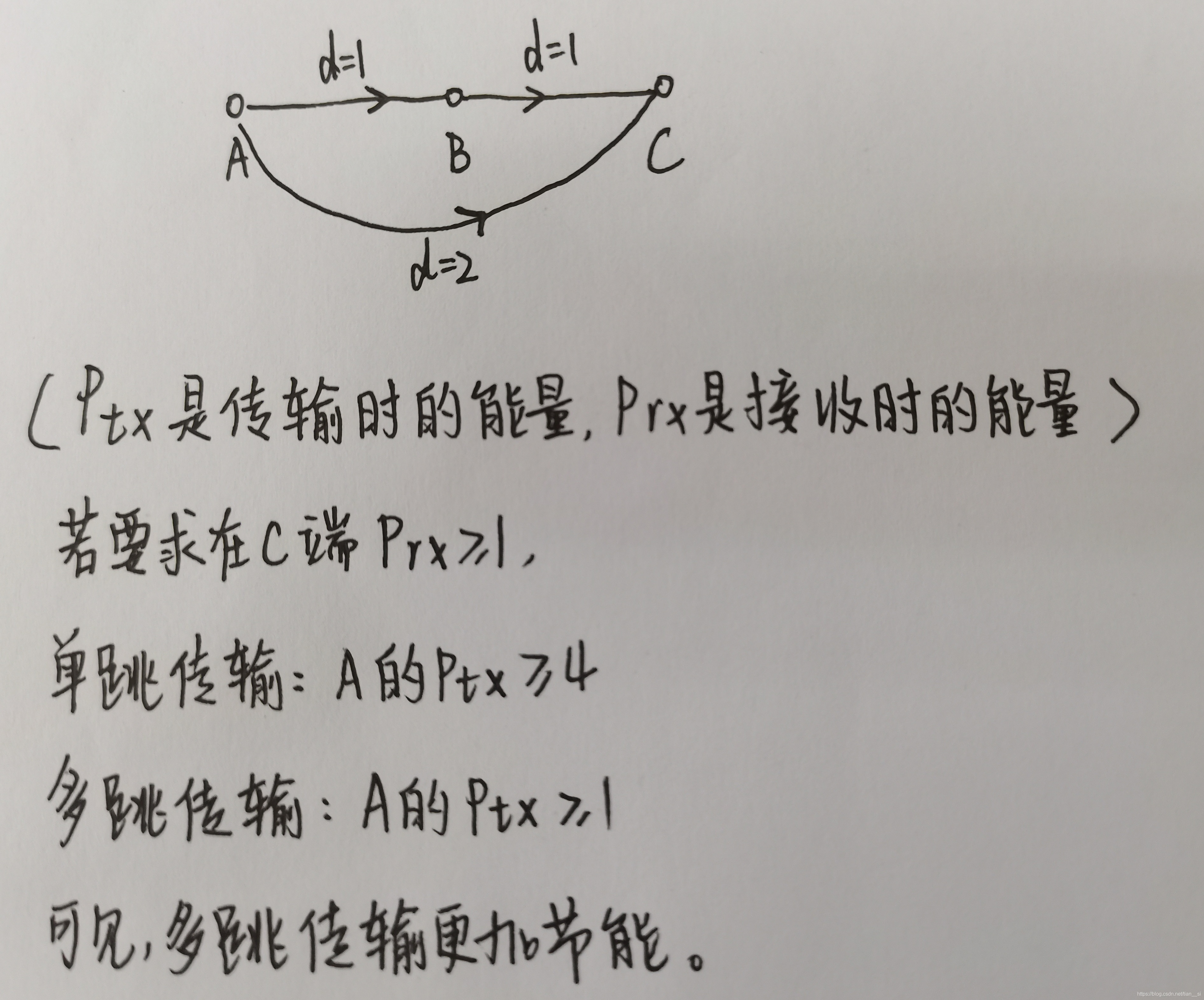
④ 為什么WSN通常采用多跳通信方式?
與信號傳播模型有關, P r x = P_{rx} = Prx?= P t x P_{tx} Ptx? C d 2 \frac{C}{d^2} d2C?
⑤ WSN 有哪些資源上的限制?會如何影響 WSN 的設計?
通信:資料壓縮、調制技術選擇,
能量:物理層提高資料發送速率、休眠、路由選擇、傳輸時盡量減少丟包、時間同步考慮節能,
存盤:不能使用復雜的作業系統、資料報不能太大、資料壓縮,
計算:不使用復雜的路由協議,
⑥ WSN 五層協議的功能是什么?
物理層:通過編碼/調制/擴頻和其他無線通信模塊將資料轉換為無線信號,
鏈路層:負責一跳距離內相鄰節點的信道共享、睡眠問題,保障在節點間公平有效地共享通信資源,
網路層:解決尋路、逐跳轉發資料的問題,
傳輸層:負責端到端的資料流傳輸,具有可靠傳輸和擁塞控制機制,
應用層:負責任務調度和資料分發等具體業務,使得底層硬體和軟體對傳感應用是透明的,
MAC和路由
① 為什么 MAC 和路由設計中能量是需要考慮的重要因素?
傳感器節點能量受限,
② 當前傳感器網路的無線通信主要選擇哪些頻段?為什么?
ISM (Industrial,Scientific,Medical),免費,
③ 基于競爭/分配的MAC協議的基本思想是什么?其優缺點各是什么?
------------------基于競爭------------------
基本思想:允許多個節點同時訪問信道,發送時主動搶占,按需分配,
優點:網路流量和規模變化自適應,網路拓撲變化自適應,演算法較簡單,
缺點:無法避免沖突,不適合流量較大的網路,
------------------基于分配------------------
基本思想:與TDMA類似,將時間分為固定長度的時隙slot,給每個節點分配時隙避免沖突,使得每個節點都有機會訪問介質,
優點:無沖突,無隱藏終端問題,易于節點休眠,
缺點:時間同步不易實作,網路動態性、多跳給時隙分配帶來困難,分配演算法較為復雜,可擴展性較差,
④ 敘述無線傳感器網路SMAC的主要特點和實作機制,
前提條件:網路資料量較小、對資料投遞延遲不敏感、網路節點間聯合完成資料投遞任務,
周期性休眠/監聽:
每個周期內,節點有偵聽和休眠兩種狀態,相鄰節點之間協商,以保持同步偵聽、同步休眠(即:同醒同睡),相鄰節點同步調度,形成虛擬簇,協議效果:節點能耗降低,資料投遞延遲增加,

沖突和串音避免:
對于沖突,采用與802.11類似的CSMA/CA和RTS/CTS握手機制來盡量避免,能夠解決隱藏終端的問題,
對于串音,采用虛擬載波監聽機制,根據資料幀的特殊欄位(告知休眠多久)讓每個與此次通信無關的鄰居節點進入休眠狀態,這樣發送和接收節點處于獨享信道的狀態,
自適應監聽:
在一次通信程序中,通信節點的鄰居節點在此次通信結束后保持蘇醒并監聽信道一段時間,如果監聽節點在這段時間內接收到發給自己的RTS控制幀,則可以立即接收資料,而不需要等到下一個監聽周期,從而減少了資料投遞延遲,
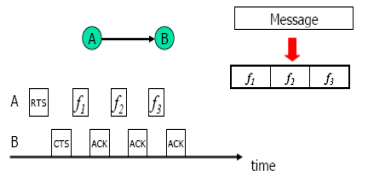
長訊息分割傳送:
將一個長的資料塊切分成若干個短的資料包進行傳輸,僅使用一個RTS訊息和一個CTS訊息為上述所有短資料包預約信道,每個短資料包都有獨立的鏈路層ACK保障其傳輸成功,這樣做降低了單個資料報的差錯率,降低了控制開銷,減小了訊息延時,
⑤ 敘述無線傳感器網路XMAC的主要特點和實作機制,
異步競爭 MAC 協議:該類協議中所有節點維持自己獨立的作業周期,收發雙方不同步,因而發送節點發出資料時接收節點可能正處于睡眠狀態,所以需要使用LPL(低功率偵聽)前導序列技識訓醒接收節點,
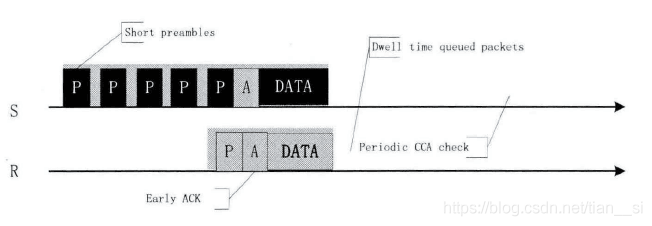
X-MAC協議是基于B-MAC協議的改進,改進了其前導序列過長的問題,將前導序列分割成若干strobe,在每個strobe中嵌入目的地址資訊,非接收節點盡早丟棄分組并睡眠,
X-MAC在發送兩個相鄰的strobe之間插入一個偵聽信道間隔,用以偵聽接收節點的早期確認,接收節點收到strobe后,向發送節點發送早期確認,發送節點收到早期確認后立即發送資料分組,避免發送節點過度前導和接收節點過度偵聽,
⑥ 常見的傳感器網路路由協議有哪些型別?并說明各種型別路由協議的適用范圍,
主動式路由:不管有沒有資料發生,每個節點都建立和維護到各個節點的路由,要求每個節點周期性地向其他節點發送最新的路由資訊并保存一個或多個路由表,
適用范圍:資料流量大、移動性較小、實時性要求較高,
反應式路由:網路拓撲和路由資訊是按需建立的,僅當某節點有資料發送時才開始尋找路由,
適用范圍:資料流量小、移動性強、實時性要求不高,
平面路由:所有節點都具有相同的地位和功能,協同完成感知和通信任務,協議簡單、健壯性好、建立維護路由開銷大,
適用范圍:小規模網路,
分層路由:網路被分為多個簇或層次,每個簇由一個簇首和多個簇成員構成,簇首負責簇內資訊的收集和融合以及簇間資料轉發,
適用范圍:中大規模網路,
資料為中心路由協議:在以資料為中心的路由中,感知到特定物理現象的傳感器節點將感知到的資料向sink節點匯報,路徑上的節點可以檢查收到的分組的內容,并根據情況執行特定的資料融合操作,
適用范圍:資料具有相關性,可以壓碩訓融合處理的網路,
基于位置的路由協議:要求每個節點具備自身位置、每個鄰居節點位置和目的節點位置等資訊來確定分組的最佳下一跳節點,可以采用逐跳方式進行資料轉發,具有較好的可擴展性,
適用范圍:具備位置資訊的網路,
多路徑路由協議:通過多條可供選擇的路徑傳送資料,能夠提高資料傳輸的魯棒性,有效均衡網路的負載和能耗,提高網路的傳輸性能并延長網路的壽命,
適用范圍:對可靠性要求較高、要求負載均衡的網路,
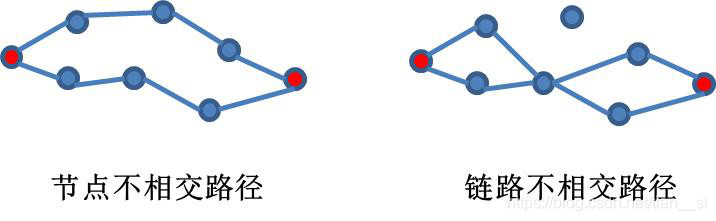
⑦ 多路徑路由(鏈路不相交、節點不相交、纏繞多路徑)的定義,以及各自的優缺點有哪些?
不相交多路徑路由:用于在源節點和目的節點間建立多條不相交路徑,分為節點不相交路徑和鏈路不相交路徑,
節點不相交路徑的優點:容錯能力強、演算法易實作、載荷較平衡、總帶寬較大,
節點不相交路徑的缺點:能量效率低、路徑數量少,
鏈路不相交路徑的優點:能量效率高、路徑數量多,
鏈路不相交路徑的缺點:容錯能力差、演算法不易實作、載荷相對不平衡、總帶寬較小,

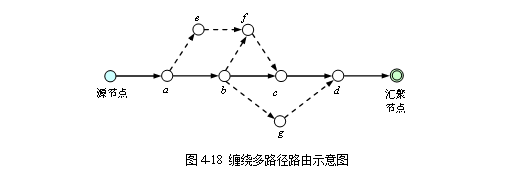
纏繞多路徑路由:也稱作部分不相交路徑或最大不相交路徑,不要求是完全不相交的,纏繞多路徑是在建立主路徑后,在主路徑的附近尋找備用路徑以提供較強的路徑備份能力,
纏繞多路徑的優點:路徑數量多、負載較均衡、提高系統可靠性,
纏繞多路徑的缺點:路徑中重疊部分較多,容錯能力較差,
⑧ Flooding、Mesh、Collect 協議的基本思路,協議適用范圍,
Flooding:
一種反應式路由,當源節點有資料需要傳輸時直接廣播,網路中每個節點接收到新的資料報都轉發一次,
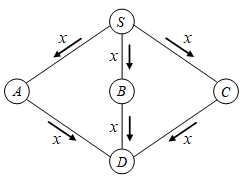
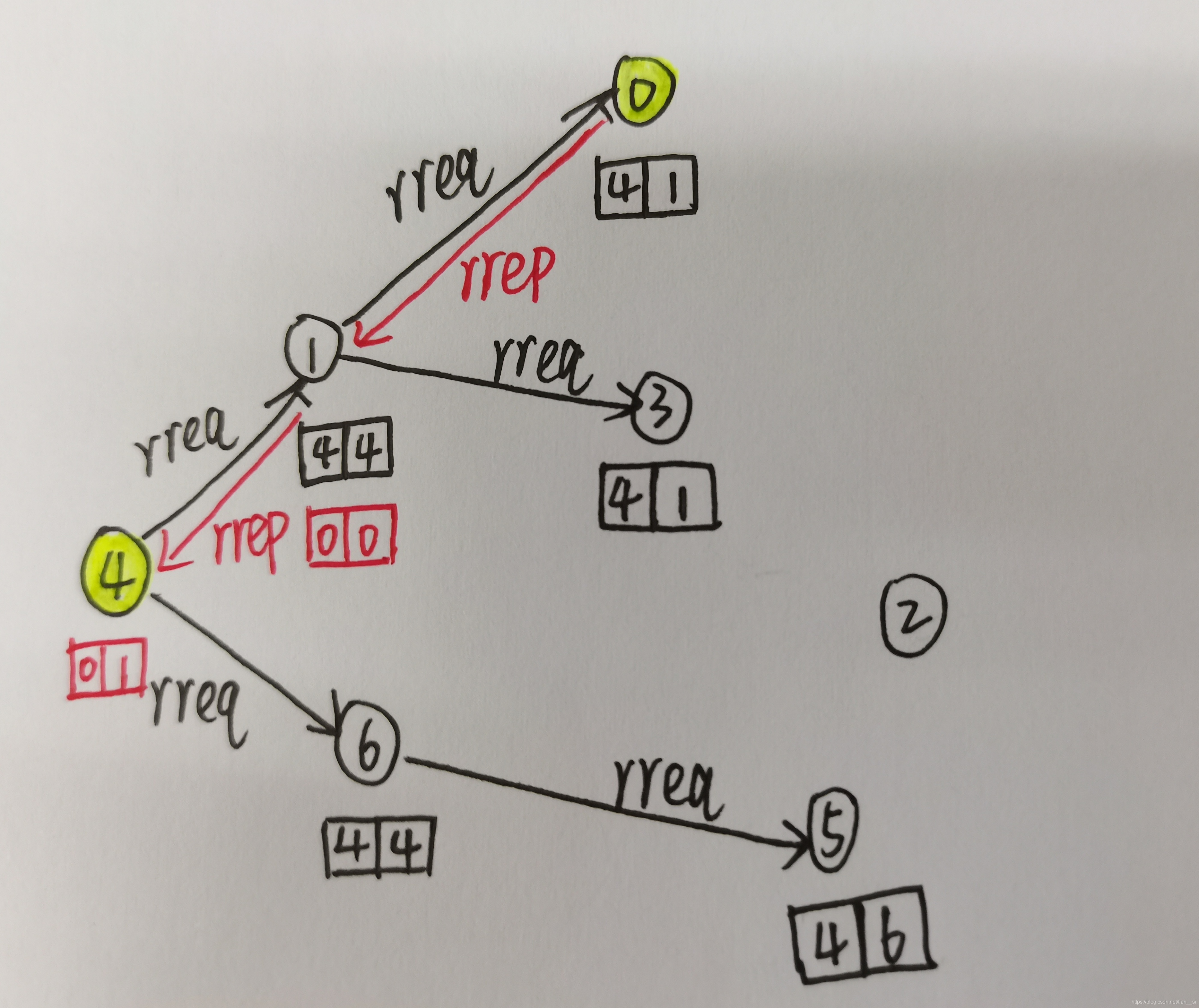
Mesh:
一種反應式路由,當源節點 S 有資料包需要發送給目的節點 D 時,S 首先全網洪范Route Request(rreq)控制包,其中包含 S 和 D 的地址資訊,
每個節點收到 rreq 后:
step1:更新路由表,將發送節點的地址加入路由表,將發送節點設為到達 S 的 next-hop,
step2:若接收節點是 D,則回傳 Route Reply(rrep)控制包,其中包含 S 的地址資訊,
每個節點收到 rrep 后:
step1:直接將 rrep 轉發給路由表中的 next-hop,更新路由表,將發送節點設為到達 D 的 next-hop,
step2:如果接收節點是 S,則說明尋路成功,準備發送資料,通過查找到達 D 的 next-hop,多跳路由即可到達 D,
Collect:
一種主動式路由,在網路初始化時即建立以 Sink 節點為根的樹狀路由結構,并周期性地進行維護,節點有資料發送時則直接沿著樹狀結構轉發即可,
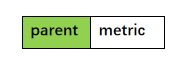
初始狀態:
每個節點 d 的父節點 p=null, metric(d)=Inf
[ 說明:metric 是一種度量,Inf 是 ∞,上圖是 Collect 的路由表項 ]
路由建立程序:
sink 節點發起路由建立,發送廣播 ADV,其中包含 metric(sink) ,metric(sink)設為 0,每個節點 d 收到 s 發來的ADV后都將比較并進行更新,如果 metric(s) + metric(s,d)< metric(d),則更新 p=s, metric(d)=metric(s) + metric(s,d),并廣播最新的ADV包含metric(d),最終所有節點都會維持一個父節點和 metric,
協議適用范圍:
Flooding、Mesh 是反應式路由:資料流量小、移動性強、實時性要求不高,
Collect 是主動式路由:資料流量大、移動性較小、實時性要求較高,
傳輸層和應用層
① PSFQ 的實作程序是什么?
適用范圍:單個 sink 向一組接收節點或網路中所有節點傳輸資料(例如全網路范圍更新指令),
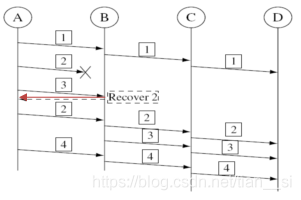
PSFQ 采用緩發快取的方式進行傳輸控制,由 pump、fetch 和 report 三種操作構成,
pump 是指 sink 給資料塊中的資料段分配序列號,并利用 MAC 層廣播按順序發送,相鄰資料段的發送保持一定時間間隔,可以保障資料段有一定的快取時間以備重傳,fetch 指節點收到順序錯誤的新資料段時暫停資料轉發,向上游節點發送 NACK 請求重傳丟失的資料段,待收到丟失資料段后再順序轉發, report 操作是 sink 要求距離較遠的節點逐跳匯報自己的地址和收包情況,據此判斷指令的分發情況,
② 擁塞的指標有哪些?擁塞緩解的主要方法有哪些?
------------------擁塞檢測------------------
基于信道采樣:若監測到信道長時間處于忙碌狀態,則認為發生擁塞,
基于緩沖區占用率:緩沖區存盤超過某一閾值,預測擁塞即將發生,
基于丟包率:若丟包過于頻繁則判斷有擁塞,
基于負載強度:綜合考慮區域區域的流量負載情況和信道競爭狀況,若負載強度過大則認為有擁塞,
基于包間隔/包服務時間:若從鄰居節點收到的資料分組到達的時間間隔,以及從到達快取區到被發送出去的服務時間過長則判斷有擁塞,
基于資料逼真度:通常由匯聚節點執行檢測,若收集到的資訊準確度過低則判斷網路擁塞,
------------------擁塞緩解------------------
速率調節:調整源節點產生資料或中間節點轉發資料的速率,
流量調度:通過繞路、分流或重定向等方式減小擁塞區域的資料流,緩解擁塞,通常與多路徑路由協議相結合,
資料處理:傳感器節點可以根據應用對資料進行丟棄、壓碩訓融合,減小資料量,
③ 可靠性保障機制有哪些?
丟包恢復:丟包檢測和反饋(ACK / NACK / IACK)+ 重傳恢復,
速率調節:基于任務調節源速率,
冗余傳輸:發送節點多次發送同一資料包的拷貝,接收節點只要收到至少一個資料包即可,
支撐技術
① 傳感器網路為什么要實作時間同步?
應用需要:
CSMA 需要時間同步;SMAC 要求節點同睡同醒;TRAMA 劃分時隙也需要時間同步;測距 ToA 要求收發雙方時間同步;某些目標跟蹤應用等都需要時間同步,
計算機時鐘很不準:
一個計算機時鐘由一個電子設備生成,這種設備計算在某個頻率下一個石英晶體的震蕩數,每個晶體振蕩器的頻率本身存在偏差,同時又容易受到濕度、電磁波干擾等影響,
② 時間 / 時鐘、時鐘漂移等概念,
對于一個傳感器節點 p 來說:
時間:p 時鐘報告的時間,可以表示為一個函式 Cp(t),t 為標準時間,Cp(t) = t 表示一個標準時間,
時鐘偏移:時鐘報告的時間與真實時間的差值, Cp(t) - t,
時鐘頻率:時鐘計數的速率,Cp '(t),
時鐘頻差:石英晶體震蕩頻率與標準時鐘的差值 Cp '(t) - 1,
時鐘漂移:時鐘值相對實際時間偏差的二階導數Cp "(t) ,
③ 如何理解傳輸延遲的不確定性給時間同步帶來的挑戰,
時間同步思路:節點 A 發送包含自己時間 Ta 的同步包給節點 B,節點 B 收到以后直接調整自己的時間為 Tb,實作同步,但是這種思路因為不確定因素有很多,所以面臨一些挑戰,
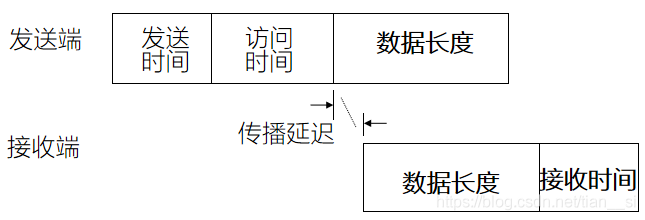
發送時間不確定:發送時間是發送節點構造并發送時間同步訊息所用的時間,這段時間長短依賴于處理器負載、作業系統的系統呼叫開銷等,具有不確定性,
訪問時間不確定:訪問時間是發送節點等待訪問信道的時間,這段時間長短依賴于信道負載,具有不確定性,
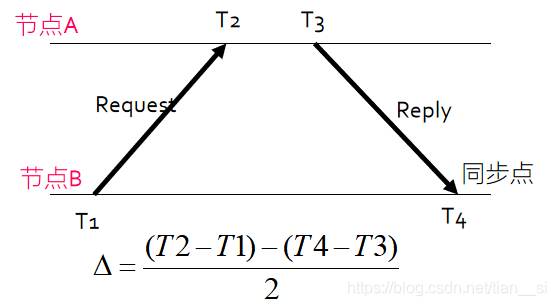
④ 掌握TPSN時間同步協議是如何進行同步的,
節點 B 想與節點 A 同步,則:
節點 B 發送同步請求并記錄發送時間 T1
節點 A 記錄接收時間 T2 ,并在 T3 時間回傳回復訊息
節點 B 記錄接收時間 T4 并同步,設定本地時間為 T4 + Δ
⑤ 掌味訓于測距的定位演算法作業機制,掌握 ToA、TDoA 、ToF 測距的原理和優缺點,掌握計算距離方法,
ToA:
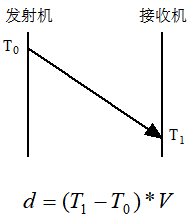
優點:實作簡單,
缺點:需要嚴格的時間同步,
TDoA:
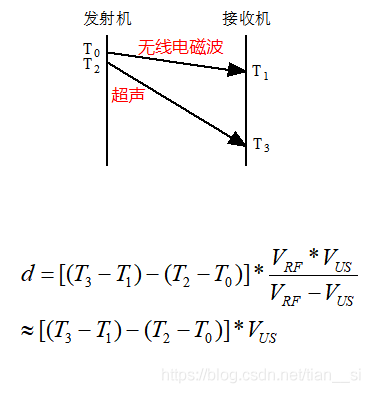
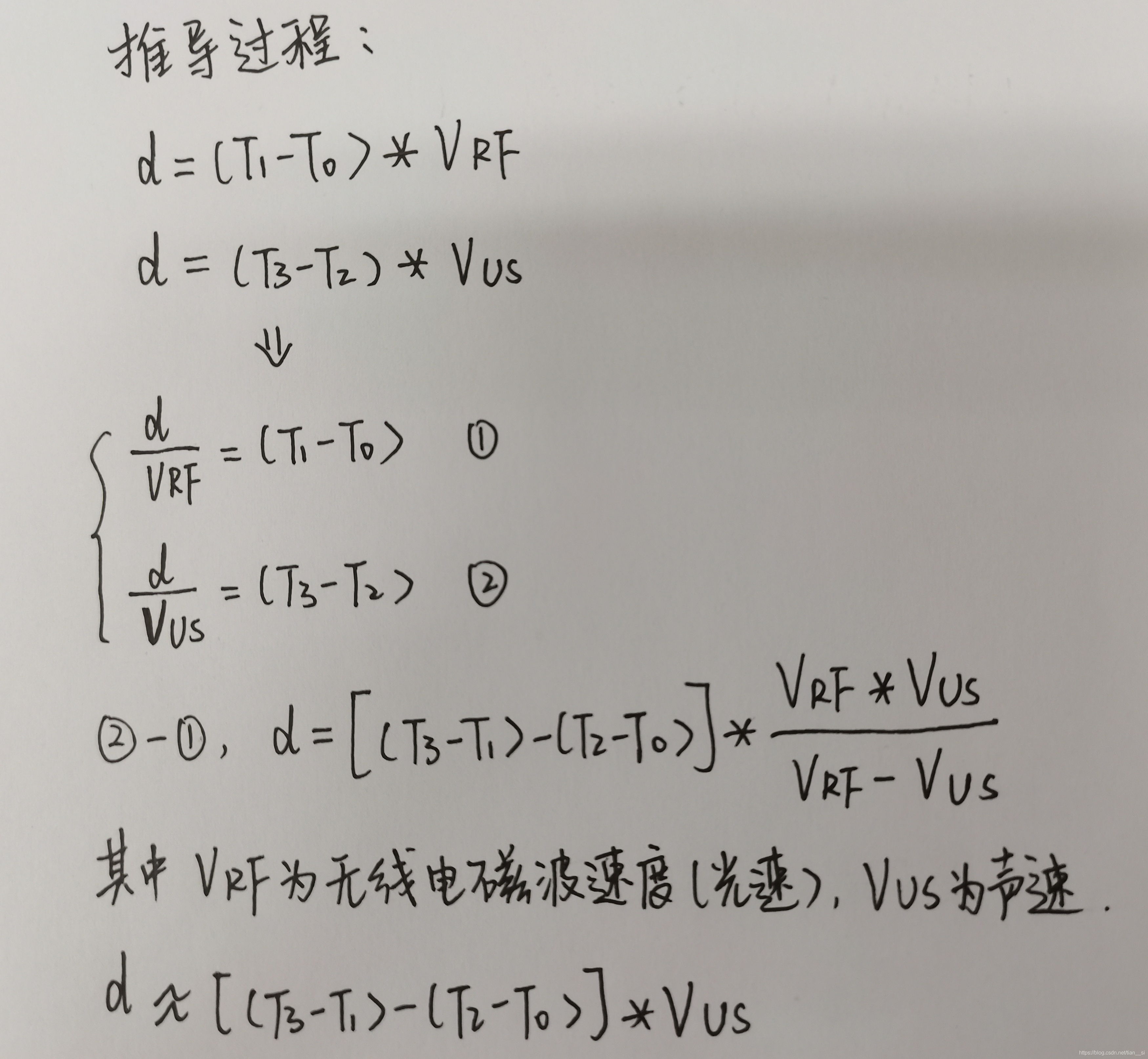
優點:不需時間同步,測距較精準,
缺點:需要兩套收發設備,成本高,
ToF:

優點:不需要時間同步,測距較精準,
缺點:需要往返通信,功耗高、續航時間短,
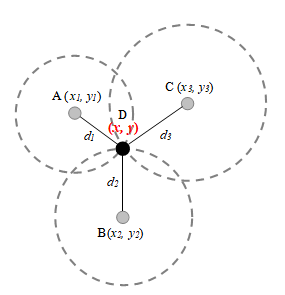
⑥ 掌握三邊定位、多邊定位的原理并進行計算,
三邊定位原理:
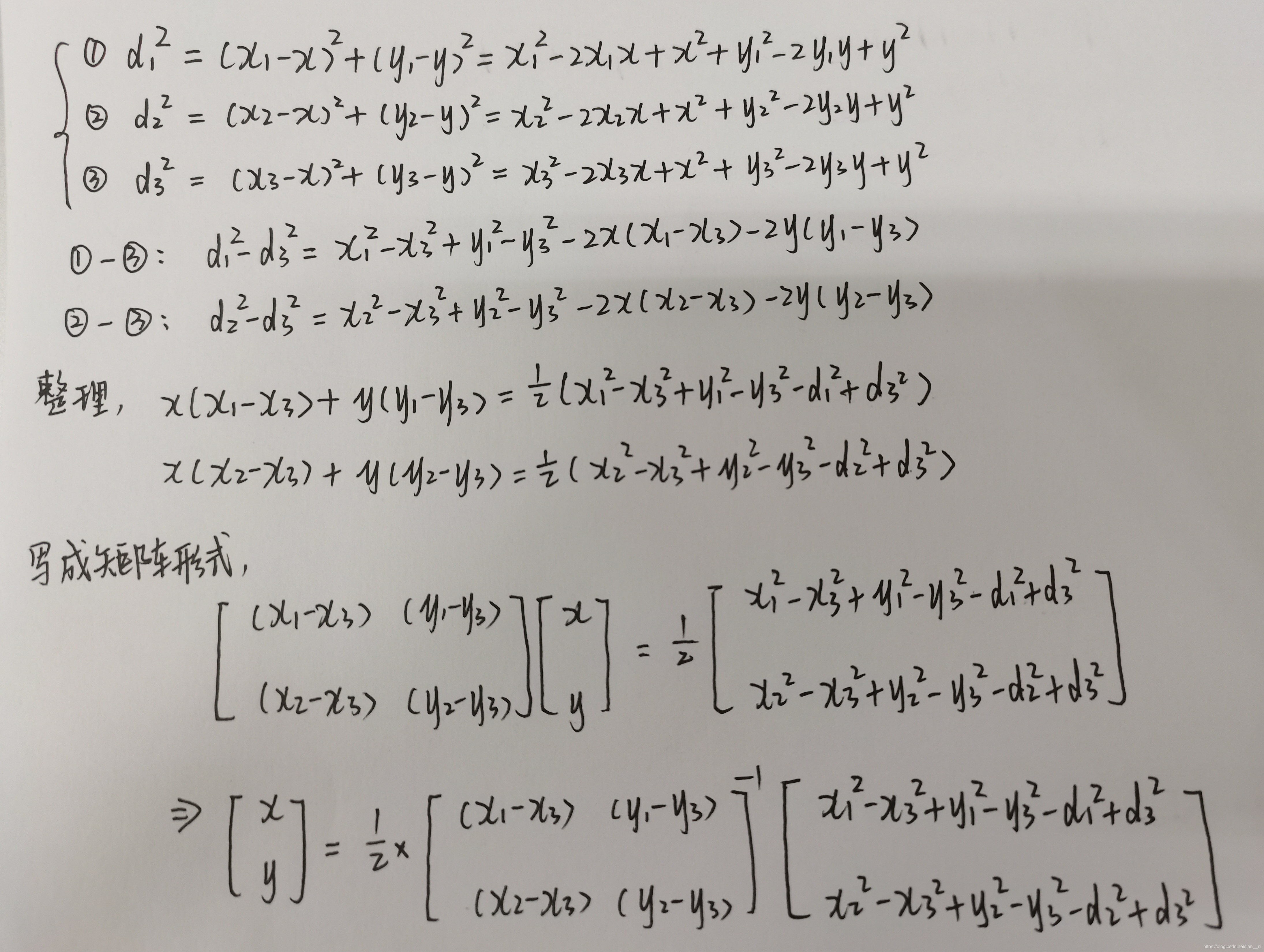
逆矩陣求法:
step1:余子式、代數余子式

step2:行列式
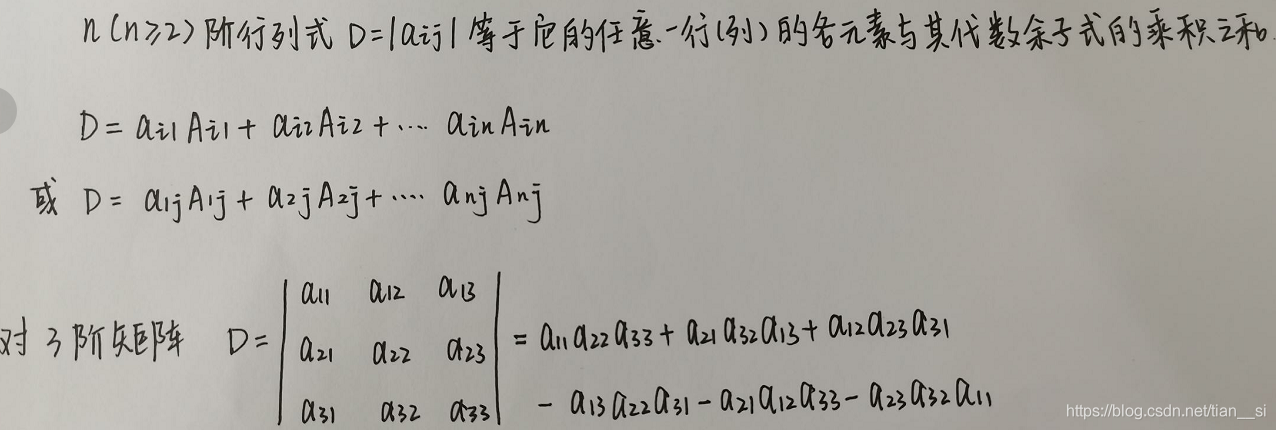
step3:伴隨矩陣
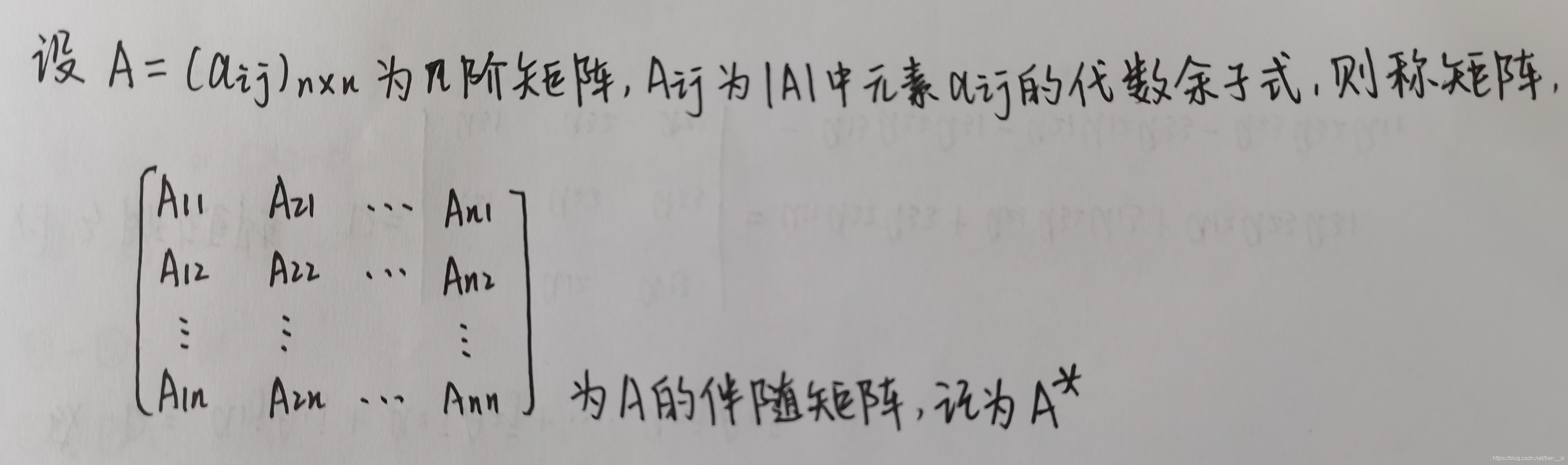
step4:逆矩陣
例題:
信標節點A、B、C的坐標為(0,0)、(20, 20)、(20, 0),未知節點距離他們的距離分別為14.14、14.14和14.14,求未知節點的坐標,
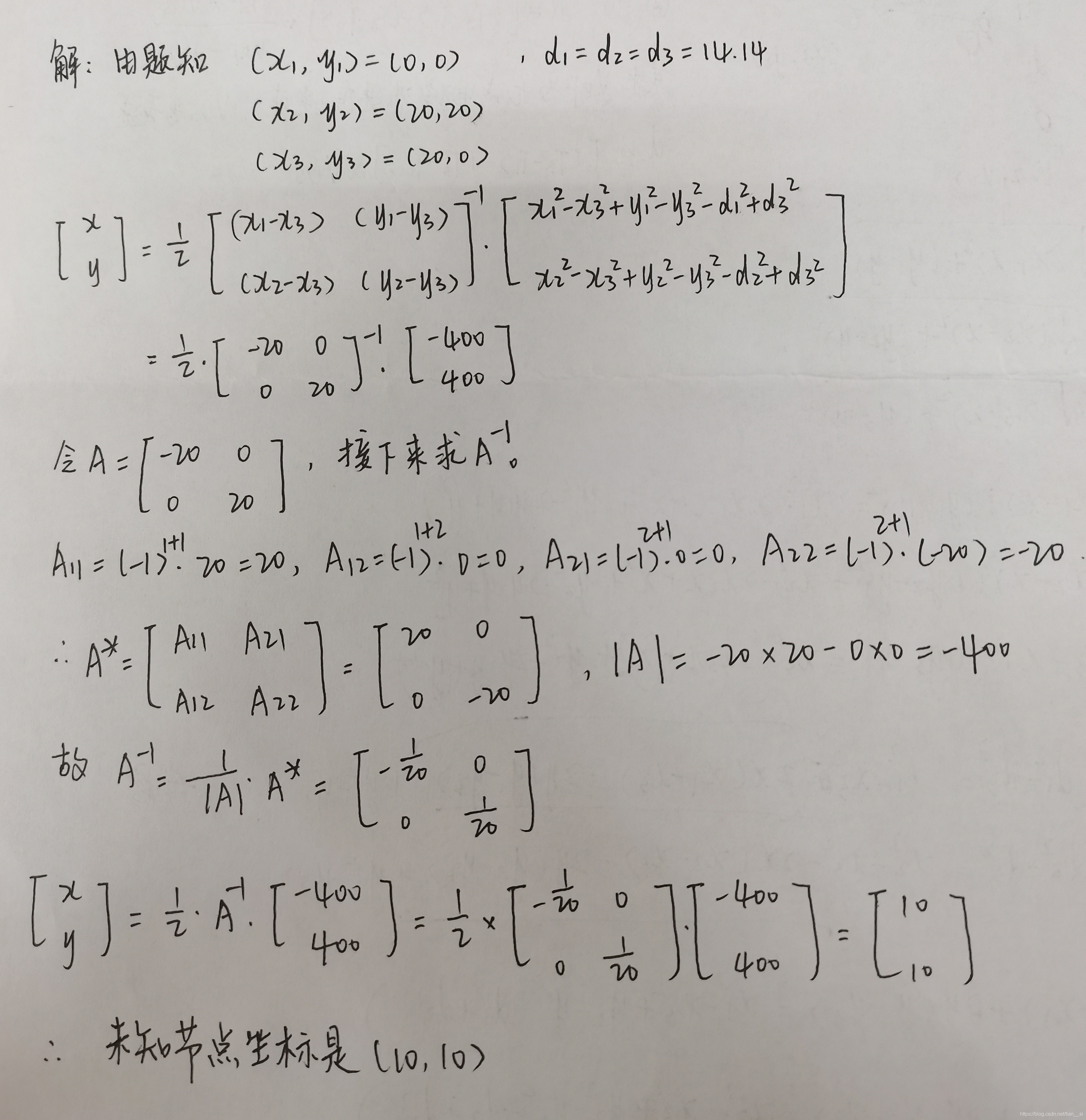
多邊定位同理,
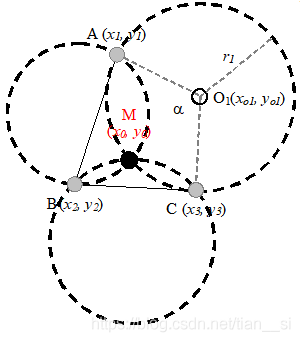
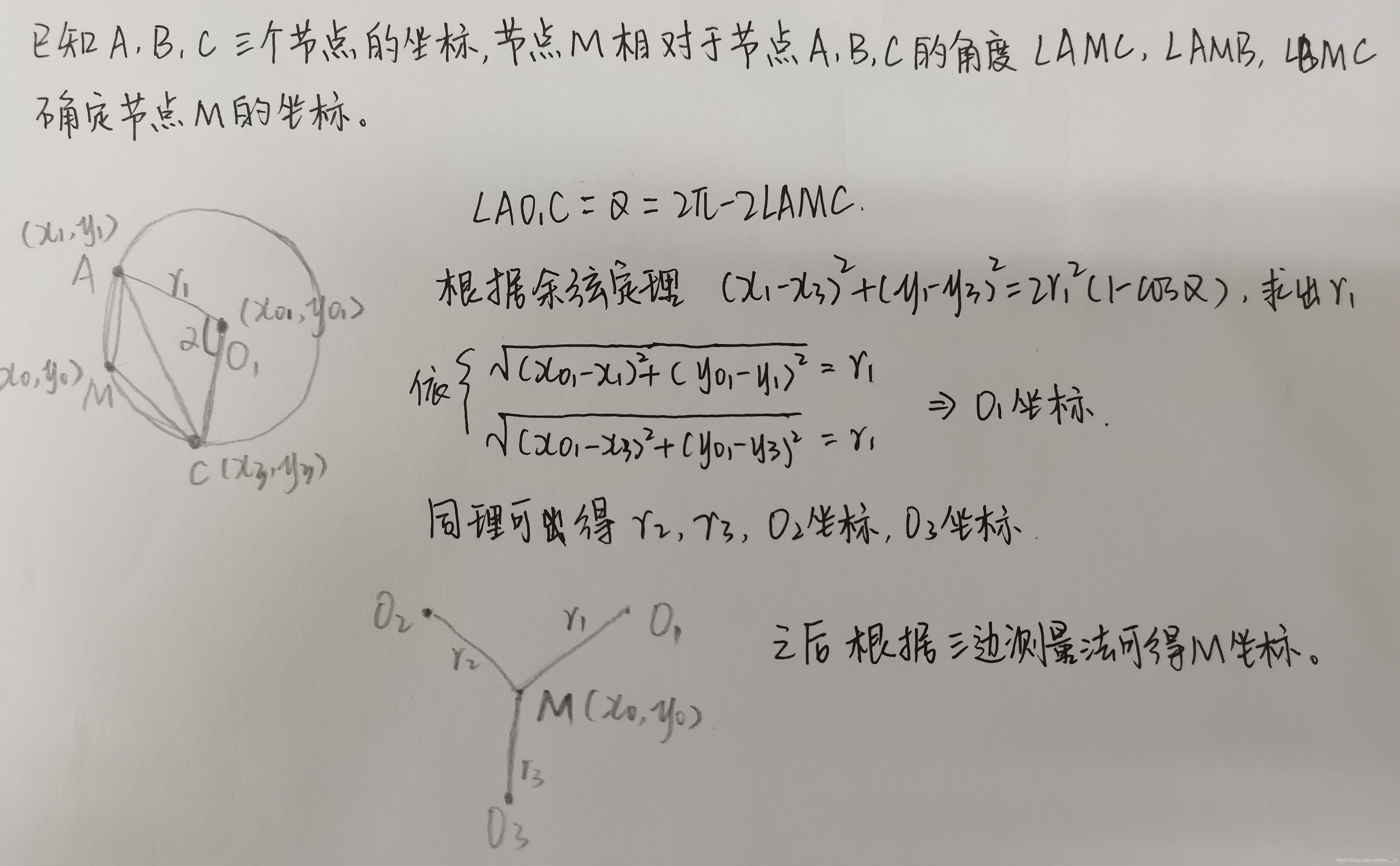
⑦ 掌握三角定位的原理,不要求計算,
⑧ 掌握 DV-Hop 演算法的定位實作程序和優缺點,
定位實作程序:
step1:計算未知節點與信標節點之間的最小跳數;
step2:估算每跳的平均距離,利用最小跳數乘以平均每跳距離,得到未知節點與信標節點之間的估計距離;
step3:利用三邊測量法或極大似然估計法計算未知節點的坐標,
優點:采用平均每跳距離來估算實際距離,不需測距、實作簡單,
缺點:利用跳段距離代替直線距離,存在一定的誤差,
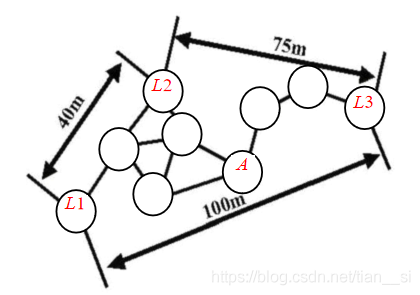
例題:給定上圖,L2 負責計算每跳平均距離,求 A 的坐標,
信標節點 L2 計算的每跳平均距離為 (40+75)/(2+5) =16.42,A 從 L2 獲得每跳平均距離,則節點 A 與三個信標節點之間的距離分別為 d1=3×16.42,d2=2×16.42,d3=3×16.42,若知道 L1、L2、L3 的坐標,那么就可以根據三邊定位的方法求出 A 的坐標,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/242427.html
標籤:其他