puresuit演算法 C++實作(ROS RVIZ 環境下展示)
/*
*初次寫代碼時間:20211月18號
*編譯環境:c++11
*系統環境:ubuntu16.04+ros-kinetic
*代碼實作功能:puresuit 演算法實作路徑跟蹤,現在只考慮位置點的變化,方位角和速度還沒展示出來,
*/
#include<iostream>
#include<cstring>
#include<stdlib.h>
#include<vector>
#include<math.h>
#include<cmath>
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
using namespace std;
double dt=0.1;//時間間隔
double K=0.1;//前視距離系數
double Lfc=2.0;//前視距離
double Kp=1.0;//速度P控制系數
double L=2.9;//車輛軸距,單位:M
//創建類 vechicleState
struct vechicleState
{
double x;
double y;
double yaw;
double v;
};
vechicleState update(vechicleState state,double a,double delta)//定義更新函式
{
state.x+=state.v*cos(state.yaw)*dt;
state.y+=state.v*sin(state.yaw)*dt;
state.yaw+=state.v/L*tan(delta)*dt;
state.v+=a*dt;
return state;
}
//轉角控制器函式
double PControl(double target,double current)
{
double a;
a=Kp*(target-current);
return a;
}
int calc_target_index(vechicleState state,vector<double> &cx,vector<double> &cy)//計算最短路徑,
{
double min=abs(sqrt(pow(state.x-cx[0],2)+pow(state.y-cy[0],2)));
int index=0;
for(int j=0;j<cx.size();j++)
{
double d=abs(sqrt(pow(state.x-cx[j],2)+pow(state.y-cy[j],2)));
if(d<min)
{
min=d;
index=j;
}
}
double L=0.0;
double Lf=K*state.v+2.0;
while(Lf>L && (index+1)<50)
{
double dx=cx[index+1]-cx[index];
double dy=cy[index+1]-cy[index];
L+=sqrt(pow(dx,2)+pow(dy,2));
index+=1;
}
return index;
}
//用struct Result回傳兩個引數
struct Result
{
double delta;
int ind;
};
Result pure_pursuit_control(vechicleState state,vector<double> &cx,vector<double> &cy,int pind)//純路徑控制
{
Result ret;
double tx;
double ty;
int ind=calc_target_index(state,cx,cy);//目標點的索引
if(pind>=ind)
{
ind=pind;
}
if(ind<cx.size())
{
tx=cx[ind];
ty=cy[ind];
}
else
{
tx=cx[cx.size()-1];//倒數第一個點
ty=cy[cx.size()-1];
ind=cx.size()-1;//最后一個點的索引
}
double pi=3.14;
double alpha=atan2(ty-state.y,tx-state.x)-state.yaw;
if (state.v<0)
{
alpha=pi-alpha;
}
//cout<<"alpha:"<<alpha<<endl;
double Lf=K*state.v+Lfc;
double delta=atan2(2.0*L*sin(alpha)/Lf,1.0);
//cout<<"delta:"<<delta<<endl;
ret.delta=delta;
ret.ind=ind;
return ret;//回傳角度和最近點的索引,
}
int main(int argc,char **argv)
{
ros::init(argc,argv,"puresuit");
ros::NodeHandle n;
ros::Publisher pub = n.advertise<visualization_msgs::Marker>("visualization_marker", 10);
visualization_msgs::Marker points;
points.header.frame_id="odom";
points.header.stamp =ros::Time::now();
ros::Rate loop_rate(10);
points.action =visualization_msgs::Marker::ADD;
points.ns="puresuit";
points.pose.orientation.w=1.0;
//設定點的屬性
points.id = 0;
points.type = visualization_msgs::Marker::POINTS;
points.scale.x = 0.1;
points.scale.y = 0.1;
points.color.g = 1.0f;
points.color.a = 1.0;
vector<double> cx={};
vector<double> cy={};
for(int i=0;i<50;i++)
{
cx.push_back(i);
cy.push_back(sin(i/5.0)*i/2.0);
}
double target_speed=10.0/3.6; //速度
double T=100; //模擬最大時間
//初始化state
struct vechicleState state={0.0,-3.0,0.0,0.0};
double lastIndex=cx.size()-1;
double time =0.0;
int target_ind=calc_target_index(state,cx,cy);
Result res;
while(T>=time && lastIndex>target_ind)
{
double ai =PControl(2.777778,state.v);
//目標點的索引和航向角
res=pure_pursuit_control(state,cx,cy,target_ind);
double di=res.delta;
int target_ind=res.ind;
//更新車的位置
state =update(state,ai,di);
cout<<"ai:"<<ai<<" di:"<<di<<" target_ind:"<<target_ind<<" x:"<<state.x<<" v:"<<state.v<<endl;
time=time+dt;
geometry_msgs::Point p;
p.x = state.x;
p.y = state.y;
p.z = 0;
points.points.push_back(p);
pub.publish(points);
loop_rate.sleep();
}
}
本次的實作環境為ROS-kinectic,用Marker幾何資訊發布,
以下為實作圖
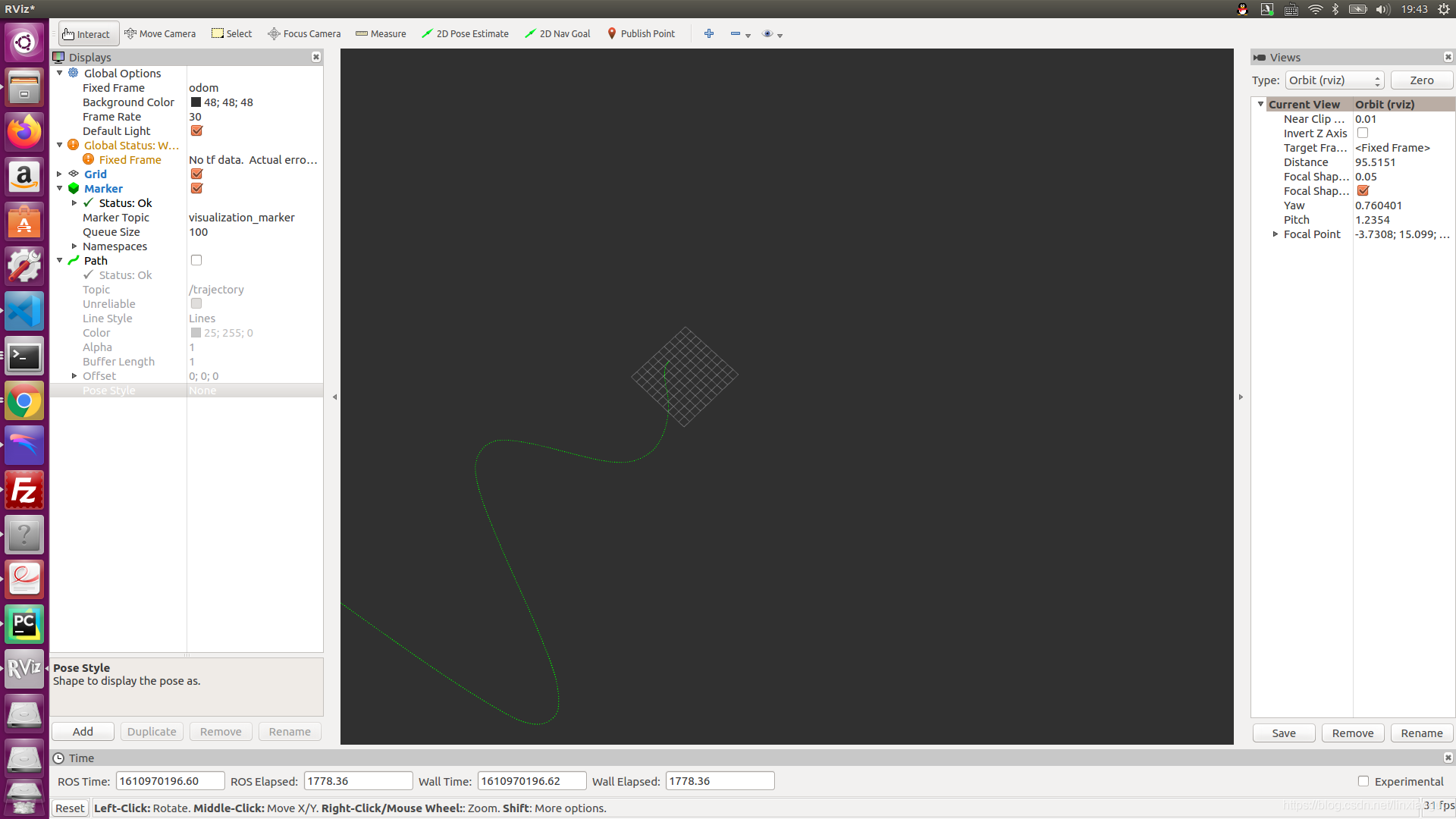
問題:演算法實作了大半部分,但到最后一個點,不知是用了ROS原因還是最后while 條件沒用正確,最后一個點過后,軌跡線又會繞回來,
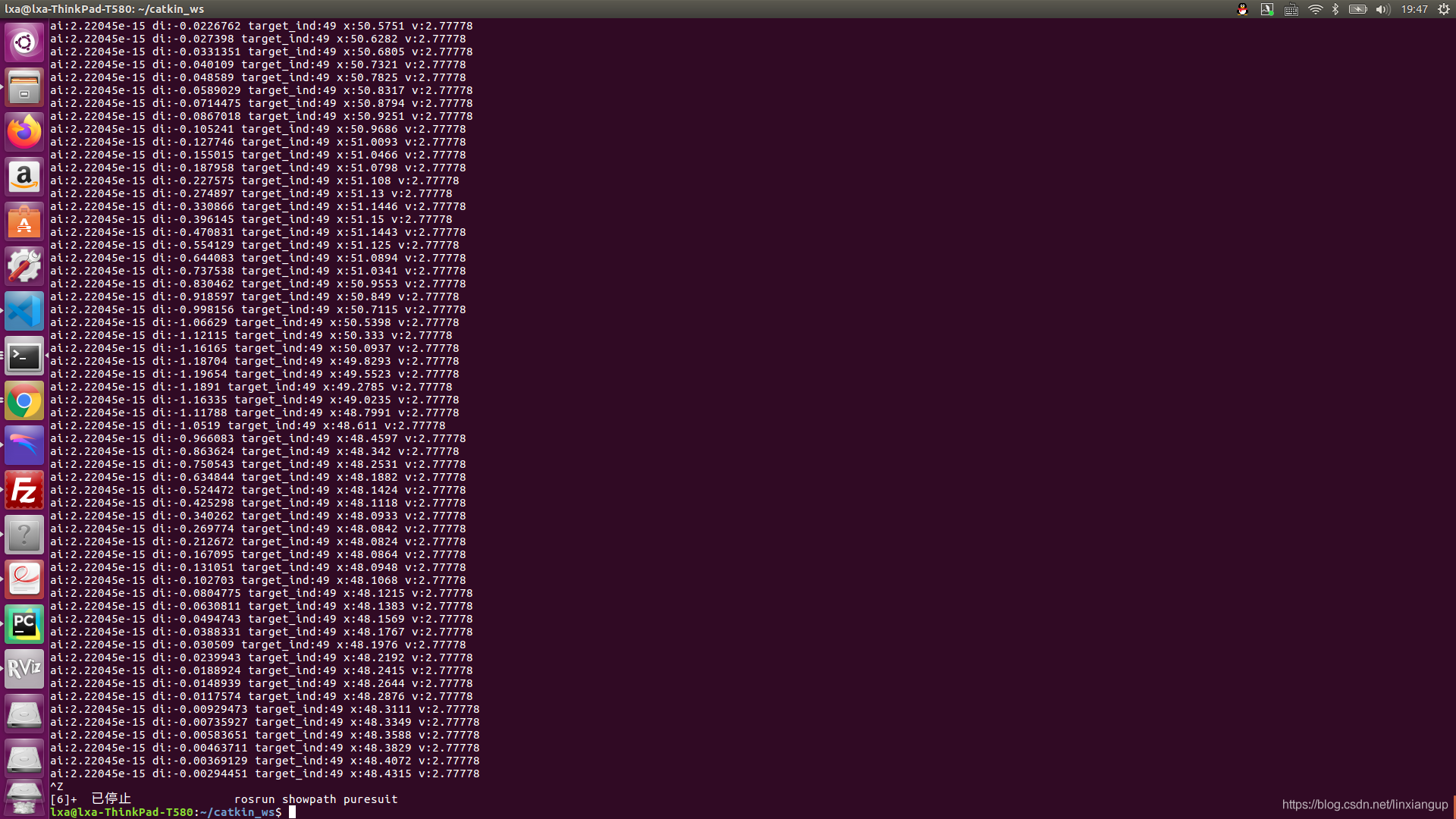
圖中x變為48了,說明已經往回走了,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/250716.html
標籤:其他
下一篇:trie樹總結和用法