6軸并聯機器人開發--簡介
- 串聯機器人
- 3軸4軸并聯機器人
- 6軸并聯機器人
- 1 日本發那科公司產品
- 2 日本松下公司產品
- 3 比較
- 定方案
- 全文鏈接如下
串聯機器人
常見的工業機器人是串聯臂,經常在電視里看到,長這樣,每一節手臂都是串聯在前一節上的,優點是動作范圍大,缺點是剛性不好,速度相對較慢,
3軸4軸并聯機器人
工業中還有一大類是并聯機器人
3軸4軸并聯臂一般長這樣:
3根主動臂驅動6根從動臂,末端執行平臺的運行軌跡始終平行于底部作業臺,
第4軸就是從中間伸一根旋轉軸,驅動末端平臺可以旋轉運動
注意始終平行這幾個字,這就是3軸4軸并聯機器人的缺點

6軸并聯機器人有很多種構型,最常見的就是6軸運動平臺

6軸并聯機器人
應用在工業上的6軸并聯機器人,目前有2種
1 日本發那科公司產品
是在三軸并聯機器人的末端,再增加一個3維旋轉平臺,通過3根旋轉軸驅動,以形成6軸運動系統

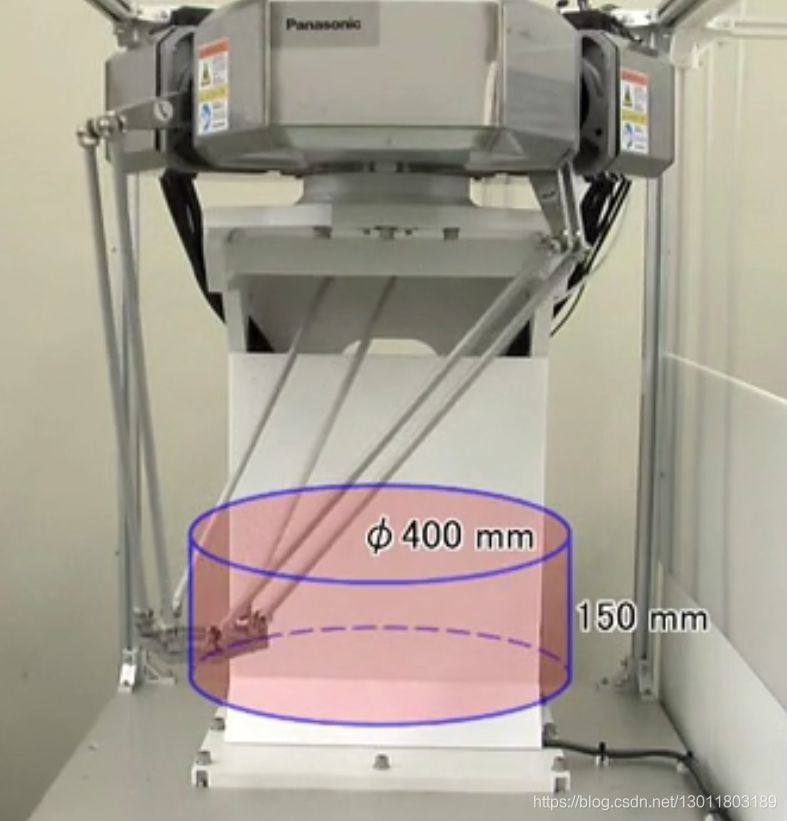
2 日本松下公司產品
用6根主動軸驅動6根從動軸,末端也可以做6軸運動
3 比較
對于發那科和松下的方案,各有優點,現比較一下
發那科:靈活,活動空間大,控制系統較為簡單,但總體剛性不如松下方案,末端執行頭加工極為復雜,內部齒輪要求加工精度極高,在相同負載時造價較高
松下:剛性好,承載力大,加工較簡單,但不如發那科方案靈活,可達范圍小,控制系統復雜很多,主要是演算法比較復雜,
定方案
對于我這個一人作業室,搞復雜的機械加工是難以相像的,批量生產需要的投資也太大,所以發那科方案基本可以舍棄,所以也只能按照松下方案設計制作,這個方案最大的好處是核心部件幾乎全是標準件,異形件對機械加工要求低,便于控制成本和交期,缺點是演算法實作的難度較大,
全文鏈接如下
https://editor.csdn.net/md/?articleId=113788951
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/259208.html
標籤:其他
上一篇:GitKraken選單欄介紹