第一章 自動駕駛概述
第二章 自動駕駛汽車決策與控制
第三章 自動駕駛汽車定位技術
第四章 自動駕駛系統設計及應用
第五章 自動駕駛汽車平臺技識訓礎
提示:這里可以添加系列文章的所有文章的目錄,目錄
提示:寫完文章后,目錄可以自動生成,如何生成可參考右邊的幫助檔案
文章目錄
- 第一章 自動駕駛概述
- 第二章 自動駕駛汽車決策與控制
- 第三章 自動駕駛汽車定位技術
- 第四章 自動駕駛系統設計及應用
- 第五章 自動駕駛汽車平臺技識訓礎
- 前言
- 一、自動駕駛分級
- 二、自動駕駛基本框架
- 1.環境感知系統
前言
隨著汽車電動化、智能化、網聯化的快速發展,汽車行業迎來了翻天覆地的變化,汽車EE架構以及軟體復雜性也以指數級增長,智能駕駛、新能源技術、車聯網、車路協同等技術快速發展,在這種大變局下,汽車行業迎來了新的發展機遇,同時也帶面臨著商業模式不確定、技術能力不足等巨大挑戰,
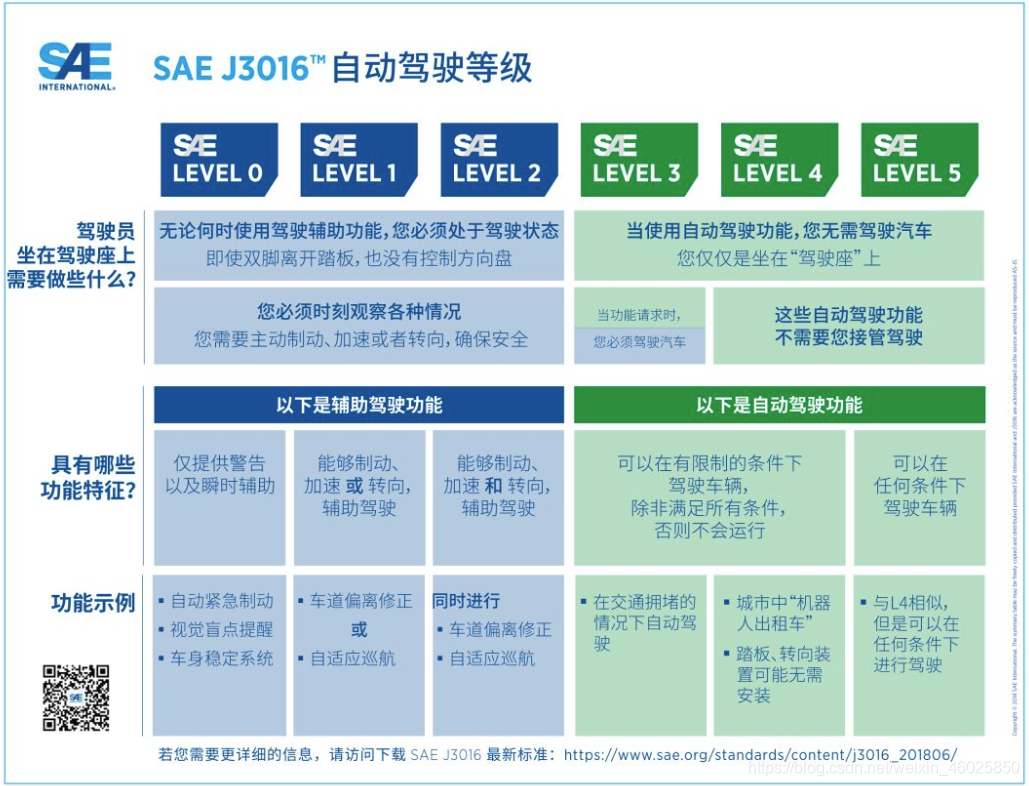
一、自動駕駛分級
二、自動駕駛基本框架
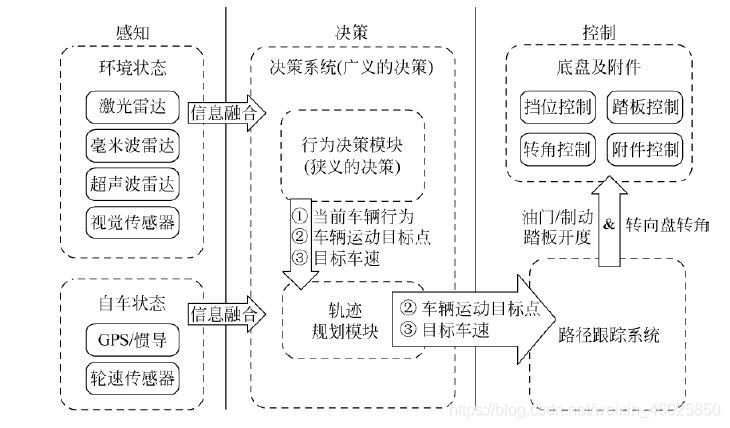
自動駕駛是人工智能在汽車上的應用,其作業原理與人工智能類似,與人類的行為模式也是一致的,駕駛員在駕駛時的操作程序為一般為:通過眼睛和耳朵感知外界環境(導航,車況和路況),然后通過大腦做出決策(選擇路線,轉彎,加速,減速,超車,剎車等),然后手和腳跟據大腦的決策做出回應的行為(轉動方向盤,加減油門,踩剎車等行為),自動駕駛按照功能分也可以分為三大部分:感知、決策、控制,
自動駕駛內容概要: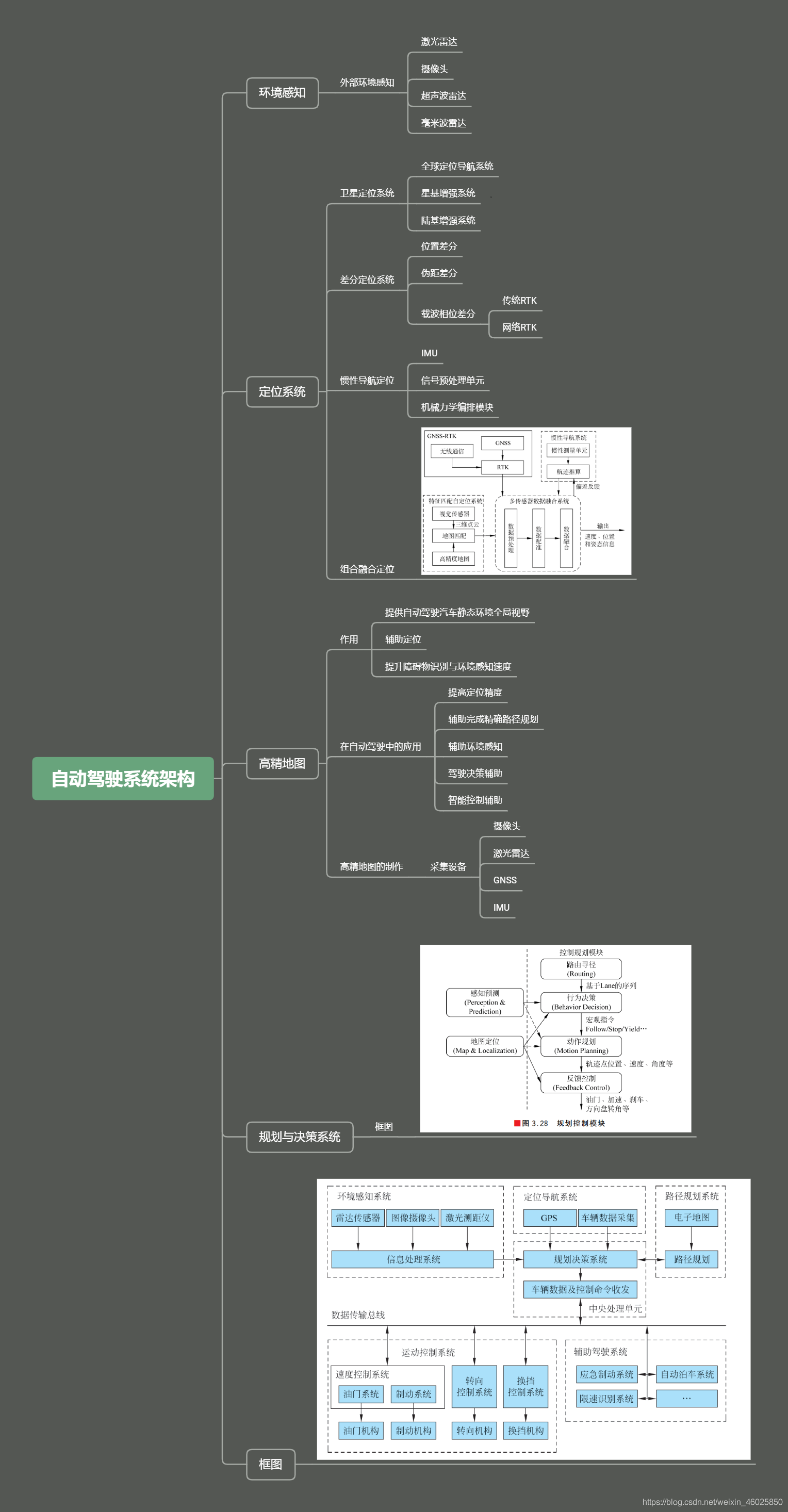
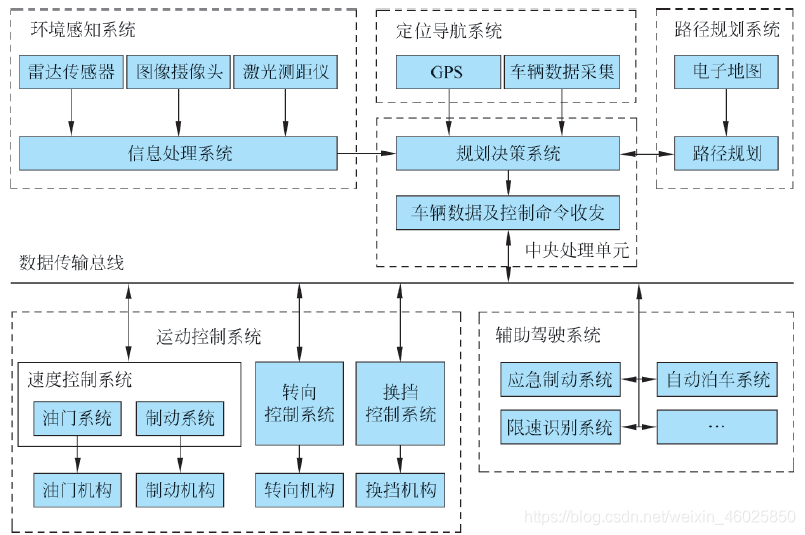
典型自動駕駛框架:
1.環境感知系統
環境感知系統優缺點如下圖表所示: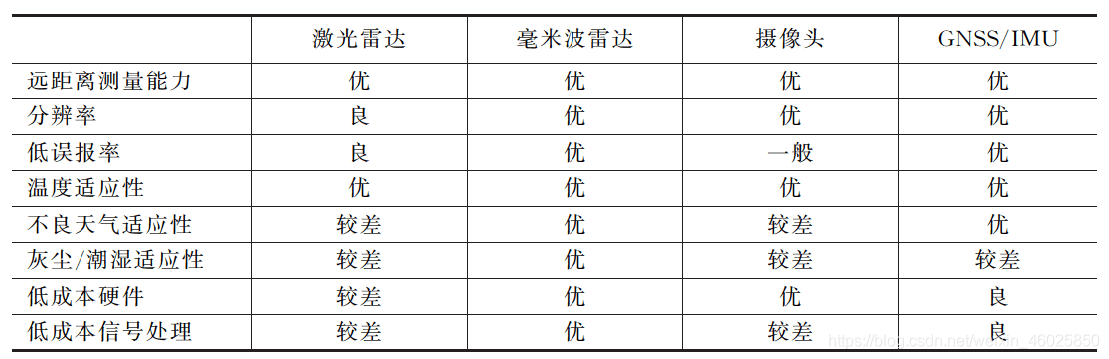
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/261045.html
標籤:其他
上一篇:常見演算法匯總( C++,Java,Python實作)
下一篇:Vue詳解+實戰分析