文章目錄
- 1 前言
- 2 原材料
- 2.1 Python環境和模塊
- 2.2 草原和風箏素材
- 2.3 打開IDLE,匯入模塊
- 3 制作工序
- 3.1 藍天和草原
- 3.2 第一只風箏
- 3.3 給風箏加上線
- 3.4 讓風箏動起來
- 3.5 放飛更多的風箏
- 4 完整原始碼
1 前言
今天是農歷的三月初三,相傳這一天是軒轅黃帝的誕辰日,春秋時期,三月初三的紀念活動還是非常隆重的,至魏晉則演變為達官顯貴、文人雅士臨水宴飲的節日,蘭亭序中提到的"曲水流觴",也許就是這一習俗的寫照吧(個人猜想,未經考證),唐以后,三月初三漸漸湮沒于歷史的長河中,
于我而言,三月初三卻是一個放風箏的日子,每逢這一天,耳邊總會響起一首老歌:又是一年三月三,風箏飛滿天……上班路上,看道路兩側草長鶯飛、楊柳拂面,一時玩心頓起:何不用3D構造一個天上白云飄飄,地上綠草茵茵的虛幻空間,在里面放飛幾只風箏自娛自樂呢?
心動不如行動,打開Python的IDLE,經過一番嘗試,竟然輕松在一片遼闊的草原上放飛了幾只風箏,風箏們迎風飄動,長長的風箏線像懸鏈一樣跟著擺動,拖動滑鼠,還可以從不同的角度、距離欣賞,恍若置身于大草原上,
如果覺得好玩,就跟我一起到草原放風箏吧,先說好了,你可以搭我的便車,食宿請自理,不多說了,快上車!
2 原材料
2.1 Python環境和模塊
一臺安裝了Python環境的電腦,Python環境需要安裝以下模塊,
- numpy
- scipy
- pillow
- wxgl
如果沒有上述模塊,請參考下面的命令安裝,我剛剛升級了wxgl模塊(從0.6.3升級到0.6.4),如果此前有安裝,請洗掉后再次安裝.
pip install numpy
pip install scipy
pip install pillow
pip install wxgl
NumPy和pillow是Python旗下最常用的科學計算庫和影像處理庫,屬于常用模塊,WxGL是一個基于PyOpenGL的三維資料可視化庫,以wx為顯示后端,提供Matplotlib風格的互動式應用模式,同時,也可以和wxPython無縫結合,在wx的表單上繪制三維模型,關于WxGL的更多資訊,請參閱我的另一篇博客《十分鐘玩轉3D繪圖:WxGL完全手冊》,
2.2 草原和風箏素材
請下載下面的草原和風箏素材,保存到專案路徑下的res檔案夾中,如果使用其他圖片,請保持草原圖片的寬高比為4:3,風箏素材需要帶透明通道的png格式,
草原素材:sky.jpg

風箏素材:butterfly.jpg
風箏素材:eagle.jpg

風箏素材:fish.jpg

2.3 打開IDLE,匯入模塊
>>> import numpy as np
>>> from PIL import Image
>>> import wxgl.wxplot as plt # 互動式3D繪圖庫
>>> from scipy.spatial.transform import Rotation # 空間旋轉計算
3 制作工序
3.1 藍天和草原
用3D繪制天空,最常用的方法是天空頂和天空盒,不過,這兩個方法都有局限性,效果只能說差強人意,我們這里用的是天空盒,所謂天空盒,顧名思義,就是從一張圖片上裁切出六個矩形,拼成一個六面體,觀察者站在六面體內,就有了“天蒼蒼野茫茫”的趕腳,

下圖是從上圖裁切出的上下前后左右六個面,
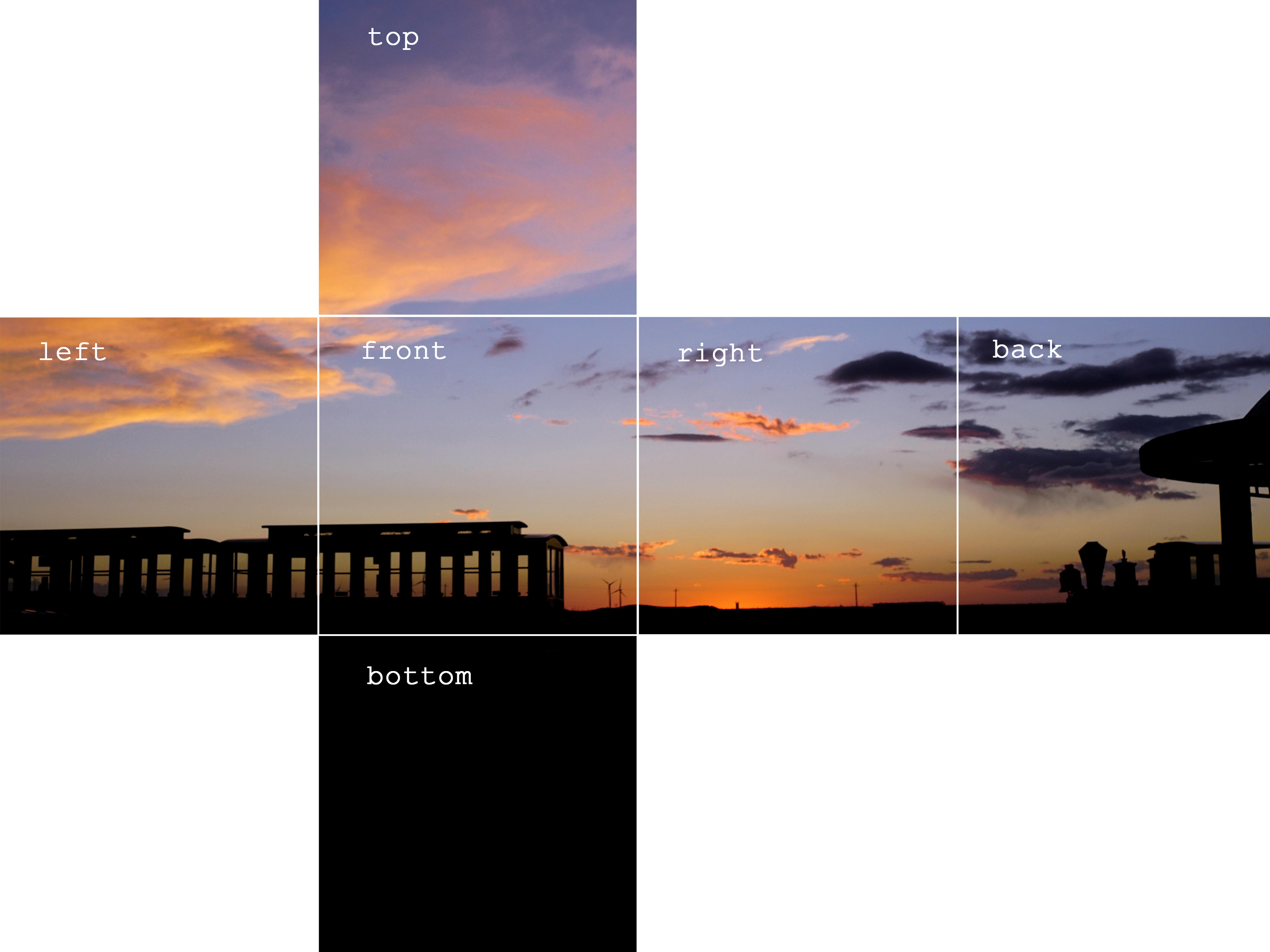
了解了天空盒的原理,實作起來就簡單多了,先來裁切上下前后左右六個面,
>>> im = np.array(Image.open(r'D:\temp\kite\res\sky.jpg')) # 打開藍天草原的圖片
>>> u = im.shape[0]//3 # 天空盒(正六面體的棱長)
>>> im_top = im[:u, u:2*u, :]
>>> im_left = im[u:2*u, :u, :]
>>> im_front = im[u:2*u, u:2*u, :]
>>> im_right = im[u:2*u, 2*u:3*u, :]
>>> im_back = im[u:2*u, 3*u:, :]
>>> im_bottom = im[2*u:, u:2*u, :]
再生成立方體的六個面在三維空間中的坐標,其中每個面用四個頂點表示,頂點按逆時針方向排列,立方體的棱長為2,也就是xyzz坐標都在[-1,1]范圍內,
>>> vs_front = np.array([[-1,-1,1], [-1,-1,-1], [-1,1,-1], [-1,1,1]])
>>> vs_left = np.array([[1,-1,1], [1,-1,-1], [-1,-1,-1], [-1,-1,1]])
>>> vs_right = np.array([[-1,1,1], [-1,1,-1], [1,1,-1], [1,1,1]])
>>> vs_top = np.array([[1,-1,1], [-1,-1,1], [-1,1,1], [1,1,1]])
>>> vs_bottom = np.array([[-1,-1,-1], [1,-1,-1], [1,1,-1], [-1,1,-1]])
>>> vs_back = np.array([[1,-1,1], [1,-1,-1], [1,1,-1], [1,1,1]])
有了六個面的材質和頂點,就可以使用surface函式繪制天空盒了,
>>> plt.surface(vs_front, texture=im_front, alpha=False)
>>> plt.surface(vs_left, texture=im_left, alpha=False)
>>> plt.surface(vs_right, texture=im_right, alpha=False)
>>> plt.surface(vs_top, texture=im_top, alpha=False)
>>> plt.surface(vs_bottom, texture=im_bottom, alpha=False)
>>> plt.surface(vs_back, texture=im_back, alpha=False)
>>> plt.show()
咦?不對啊,為什么我在天空盒外而不是天空盒內呢?

原來,WxGL默認觀察者距離坐標原點5個單位的距離,而天空盒在[-1,1]范圍內,自然就處于天空盒外了,莫著急,只要設定一下畫布函式plt.figure()的引數,就OK了,引數dist用于設定觀察者距離觀察目標的距離,配合方位角引數azimuth和仰角引數elevation,可以確定觀察者位置;引數view用于設定視景體,view陣列的6個元素分別表示視景體的左、右、上、下面,以及前后面距離觀察者的距離,
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0)
>>> plt.surface(vs_front, texture=im_front, alpha=False)
>>> plt.surface(vs_left, texture=im_left, alpha=False)
>>> plt.surface(vs_right, texture=im_right, alpha=False)
>>> plt.surface(vs_top, texture=im_top, alpha=False)
>>> plt.surface(vs_bottom, texture=im_bottom, alpha=False)
>>> plt.surface(vs_back, texture=im_back, alpha=False)
>>> plt.show()
天空盒最終的效果如下圖所示,嘗試拖動滑鼠、滑動滾輪,你會發現天空盒的缺陷,不過,這不會影響我們放飛風箏,

為了方便后續操作,我們將繪制天空盒的代碼封裝成一個函式,
>>> def draw_sky_box():
plt.surface(vs_front, texture=im_front, alpha=False)
plt.surface(vs_left, texture=im_left, alpha=False)
plt.surface(vs_right, texture=im_right, alpha=False)
plt.surface(vs_top, texture=im_top, alpha=False)
plt.surface(vs_bottom, texture=im_bottom, alpha=False)
plt.surface(vs_back, texture=im_back, alpha=False)
>>>
3.2 第一只風箏
現在觀察者位于(0.8,0,0)的位置,假定風箏中心位于v1點(-0.5,-0.3,0.2)的位置(觀察者左前上方),我們需要根據風箏素材的尺寸,確定風箏在空間中的坐標,
>>> im_kite = np.array(Image.open(r'D:\temp\kite\res\butterfly.png')) # 打開風箏圖片
>>> max_s = max(im_kite.shape) # 風箏的最長邊
>>> dx, dy = 0.1*im_kite.shape[0]/max_s, 0.1*im_kite.shape[1]/max_s # 計算風箏在空間中的實際尺寸
>>> v1 = (-0.5,-0.3,0.2) # 風箏中心位置
>>> vs_kite = np.array([[dx,-dy,0.03], [-dx,-dy,0], [-dx,dy,0], [dx,dy,0.03]]) # 風箏四角的坐標,前端略高(后仰0.03)
>>> vs_kite[:,0] += v1[0] # 從原點移到v1點
>>> vs_kite[:,1] += v1[1] # 從原點移到v1點
>>> vs_kite[:,2] += v1[2] # 從原點移到v1點
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0) # 設定畫布
>>> draw_sky_box() # 繪制天空盒
>>> plt.surface(vs_kite, texture=im_kite, alpha=True) # 繪制風箏(png格式需要使用透明通道)
>>> plt.show()
至此,終于在草原上放飛了第一只風箏,

3.3 給風箏加上線
風箏線近似于一條懸鏈線,我們可以用三次曲線模擬,如果放風箏的人在v0點,風箏中心位于v1點,風箏線就可以用k個點來描述,先來定義一個根據v0點和v1點計算風箏線的函式,
>>> def get_line(v0, v1, k=300):
m = np.power(np.linspace(0,k,k), 3)/(k*k*k)
dx, dy = v1[0]-v0[0], v1[1]-v0[1]
x = v1[0] - m*dx
y = v1[1] - m*dy
z = np.linspace(v1[2], v0[2], k)
return x, y, z
>>>
重復一遍繪制天空盒和風箏的代碼,稍加修改,即可加上風箏線,
>>> v0 = (0.5,0.2,-1) # 放風箏的人在v0點
>>> v1 = (-0.5,-0.3,0.2) # 風箏中心位于v1點
>>> xs, ys, zs = get_line(v0, v1) # 計算風箏懸鏈線
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0) # 設定畫布
>>> draw_sky_box() # 繪制天空盒
>>> plt.surface(vs_kite, texture=im_kite, alpha=True) # 繪制風箏
>>> plt.plot(xs, ys, zs, color='#C0C0C0', width=0.3) # 繪制風箏懸鏈線
>>> plt.show()
plt.plot()函式用于繪制點或線,引數width用于設定線寬,如果覺得風箏線不夠明顯,可以適當增加線寬,

3.4 讓風箏動起來
想象一下風箏在天空中的飄動姿態,其運動軌跡有兩個特點:
- 水平方向延弧線擺動,幅度約30°左右
- 擺動到左側則左側稍低,擺動到右側則右側稍低
據此,不難模擬出風箏的擺動軌跡,計算出運動軌跡線上每一處風箏的坐標,同時計算出對應的風箏懸鏈線,啟動一個定時器,順序顯示軌跡線上每一處風箏及其懸鏈線,形成影片,
WxGL的plt.surface()函式和plt.plot()函式,支持通過引數slide=True將對應的模型放入一個影片序列,執行plt.show()的時候,會自動播放這個模型序列,時間間隔由plt.figure()函式interval的引數決定,默認值100毫秒,如果多個模型需要同時顯示,只需要用name引數為多個模型指定相同的名字即可,
好,我們來定義一個繪制飄動風箏的函式,
>>> def draw_kite(fn, v0, v1, dh=0.03, ex=(-20,20), fs=160):
im_kite = np.array(Image.open(fn)) # 打開風箏圖片
max_s = max(im_kite.shape) # 風箏的最長邊
dx, dy = 0.1*im_kite.shape[0]/max_s, 0.1*im_kite.shape[1]/max_s # 計算風箏在空間中的實際尺寸
delta = np.hstack((np.linspace(-0.03, 0.03, fs), np.linspace(0.03, -0.03, fs))) # 風箏左右擺動程序中的高度波動
theta = np.hstack((np.linspace(ex[0], ex[1], fs), np.linspace(ex[1], ex[0], fs))) # 風箏左右擺動的角度
vs_kite = np.array([[dx,-dy,dh], [-dx,-dy,0], [-dx,dy,0], [dx,dy,dh]]) # 風箏四角的坐標,前端略高(后仰)
vs_kite[:,0] += v1[0]
vs_kite[:,1] += v1[1]
vs_kite[:,2] += v1[2]
offset = np.random.randint(0, 2*fs)
for i in range(2*fs):
k = (i+offset)%(2*fs)
rotator = Rotation.from_euler('xyz', [0, 0, theta[k]], degrees=True)
vs = rotator.apply(vs_kite)
vs[:2, 2] -= delta[k]
vs[2:, 2] += delta[k]
plt.surface(vs, texture=im_kite, alpha=True, slide=True, name='id_%d'%i)
xs, ys, zs = get_line(v0, ((vs[0][0]+vs[2][0])/2,(vs[0][1]+vs[2][1])/2,(vs[0][2]+vs[2][2])/2))
plt.plot(xs, ys, zs, color='#C0C0C0', width=0.3, slide=True, name='id_%d'%i)
>>>
呼叫一下試試看,
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0, interval=50) # 設定畫布,影片間隔50毫秒
>>> draw_sky_box() # 繪制天空盒
>>> draw_kite(r'D:\temp\kite\res\butterfly.png', (0.5,0.2,-1), (-0.5,-0.3,0.2)) # 繪制風箏
>>> plt.show()
和我們設想的一樣,風箏在[-20°,20°]的范圍內左右擺動,懸鏈線也跟著一起飄動,

3.5 放飛更多的風箏
現在,我們有三張風箏的圖片,把它們都放飛到天空盒中吧,至于風箏的位置、放飛者的位置,你可以根據自己的想象,隨意定義,
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0, interval=50)
>>> draw_sky_box()
>>> draw_kite(r'D:\temp\kite\res\butterfly.png', (0.5,0.2,-1), (-0.5,-0.3,0.2))
>>> plt.show()
>>> plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0, interval=50)
>>> draw_sky_box()
>>> draw_kite(r'D:\temp\kite\res\butterfly.png', (0.5,0.2,-1), (-0.5,-0.3,0.2))
>>> draw_kite(r'D:\temp\kite\res\fish.png', (0.3,0,-1), (-0.2,-0.1,0.05), ex=(-40,40))
>>> draw_kite(r'D:\temp\kite\res\eagle.png', (0.2,0.05,-1), (-0.6,0.5,0.35))
>>> plt.show()
至此,大功告成,

4 完整原始碼
# -*- coding: utf-8 -*-
import numpy as np
from PIL import Image
import wxgl.wxplot as plt # 互動式3D繪圖庫
from scipy.spatial.transform import Rotation # 空間旋轉計算
def draw_sky_box(fn):
"""繪制天空盒
fn - 圖片檔案名(寬高比4:3)
"""
im = np.array(Image.open(fn)) # 打開資源圖片
u = im.shape[0]//3 # 天空盒(正六面體的棱長)
# 裁切出天空盒6個面:上下前后左右
im_top = im[:u, u:2*u, :]
im_left = im[u:2*u, :u, :]
im_front = im[u:2*u, u:2*u, :]
im_right = im[u:2*u, 2*u:3*u, :]
im_back = im[u:2*u, 3*u:, :]
im_bottom = im[2*u:, u:2*u, :]
# 定義天空盒六個面的,4個頂點按逆時針方向排列
vs_front = np.array([[-1,-1,1], [-1,-1,-1], [-1,1,-1], [-1,1,1]])
vs_left = np.array([[1,-1,1], [1,-1,-1], [-1,-1,-1], [-1,-1,1]])
vs_right = np.array([[-1,1,1], [-1,1,-1], [1,1,-1], [1,1,1]])
vs_top = np.array([[1,-1,1], [-1,-1,1], [-1,1,1], [1,1,1]])
vs_bottom = np.array([[-1,-1,-1], [1,-1,-1], [1,1,-1], [-1,1,-1]])
vs_back = np.array([[1,-1,1], [1,-1,-1], [1,1,-1], [1,1,1]])
# 繪制天空盒的六個面
plt.surface(vs_front, texture=im_front, alpha=False)
plt.surface(vs_left, texture=im_left, alpha=False)
plt.surface(vs_right, texture=im_right, alpha=False)
plt.surface(vs_top, texture=im_top, alpha=False)
plt.surface(vs_bottom, texture=im_bottom, alpha=False)
plt.surface(vs_back, texture=im_back, alpha=False)
def get_line(v0, v1, k=300):
"""風箏線:從風箏底部到放飛者,近似懸鏈線
v0 - 放飛者坐標
v1 - 風箏底部系線處坐標
k - 描繪風箏線的點的數量,默認300點
"""
m = np.power(np.linspace(0,k,k), 3)/(k*k*k)
dx, dy = v1[0]-v0[0], v1[1]-v0[1]
x = v1[0] - m*dx
y = v1[1] - m*dy
z = np.linspace(v1[2], v0[2], k)
return x, y, z
def draw_kite(fn, v0, v1, dh=0.03, ex=(-20,20), fs=160):
"""繪制風箏
fn - 風箏圖片檔案名(png格式,帶透明通道)
dh - 風箏后仰高度,默認0.02
ex - 風箏左右擺動的角度范圍
fs - 風箏隨風擺動的幀數
"""
im_kite = np.array(Image.open(fn)) # 打開風箏圖片
max_s = max(im_kite.shape) # 風箏的最長邊
dx, dy = 0.1*im_kite.shape[0]/max_s, 0.1*im_kite.shape[1]/max_s # 計算風箏在空間中的實際尺寸
delta = np.hstack((np.linspace(-0.03, 0.03, fs), np.linspace(0.03, -0.03, fs))) # 風箏左右擺動程序中的高度波動
theta = np.hstack((np.linspace(ex[0], ex[1], fs), np.linspace(ex[1], ex[0], fs))) # 風箏左右擺動的角度
vs_kite = np.array([[dx,-dy,dh], [-dx,-dy,0], [-dx,dy,0], [dx,dy,dh]]) # 風箏四角的坐標,前端略高(后仰)
vs_kite[:,0] += v1[0]
vs_kite[:,1] += v1[1]
vs_kite[:,2] += v1[2]
offset = np.random.randint(0, 2*fs)
for i in range(2*fs):
k = (i+offset)%(2*fs)
rotator = Rotation.from_euler('xyz', [0, 0, theta[k]], degrees=True)
vs = rotator.apply(vs_kite)
vs[:2, 2] -= delta[k]
vs[2:, 2] += delta[k]
plt.surface(vs, texture=im_kite, alpha=True, slide=True, name='id_%d'%i)
xs, ys, zs = get_line(v0, ((vs[0][0]+vs[2][0])/2,(vs[0][1]+vs[2][1])/2,(vs[0][2]+vs[2][2])/2))
plt.plot(xs, ys, zs, color='#C0C0C0', width=0.3, slide=True, name='id_%d'%i)
if __name__ == '__main__':
plt.figure(dist=0.8, view=[-1, 1, -1, 1, 0.8, 7], elevation=0, azimuth=0, interval=50)
draw_sky_box('res/sky.jpg')
draw_kite('res/butterfly.png', (0.5,0.2,-1), (-0.5,-0.3,0.2))
draw_kite('res/fish.png', (0.3,0,-1), (-0.2,-0.1,0.05), ex=(-40,40))
draw_kite('res/eagle.png', (0.2,0.05,-1), (-0.6,0.5,0.35))
plt.show()
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/276243.html
標籤:其他