A題 火星探測器著陸控制方案
本題聚焦于探測器從火星同步軌道出發到探測器在火星地表上方懸停的程序(以下簡稱著陸程序),要求參賽隊收集有關天問一號探測器的音像和文字等公開資料,建立數學模型,研究如下問題:
-
確定探測器著陸程序時間最短的操控方案(包括環繞器與著陸巡視器分離、阻尼傘打開、發動機系統點火等時間,以及發動機系統運行方案);
-
對給定的著陸程序時間,確定消耗能量最少的操控方案;
-
如果希望探測器著陸程序與公開的音像和文字資料盡量一致,如何設計操控方案,
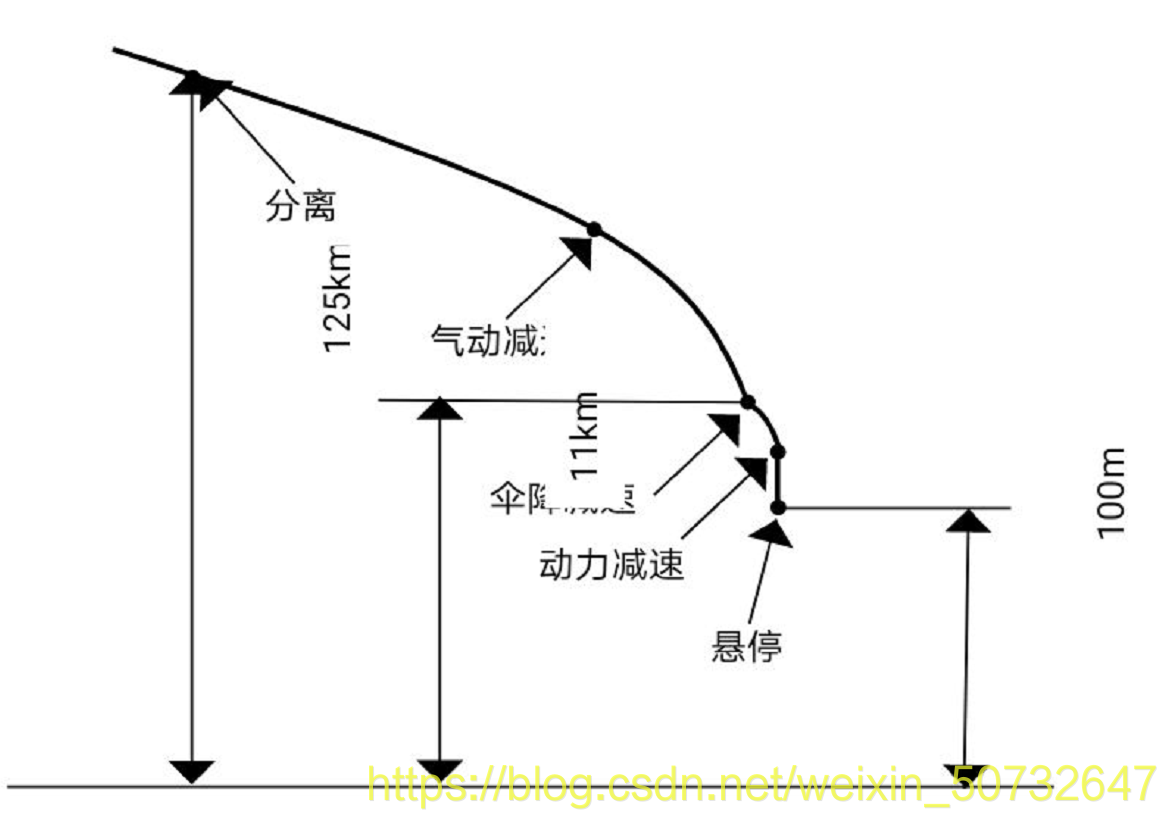
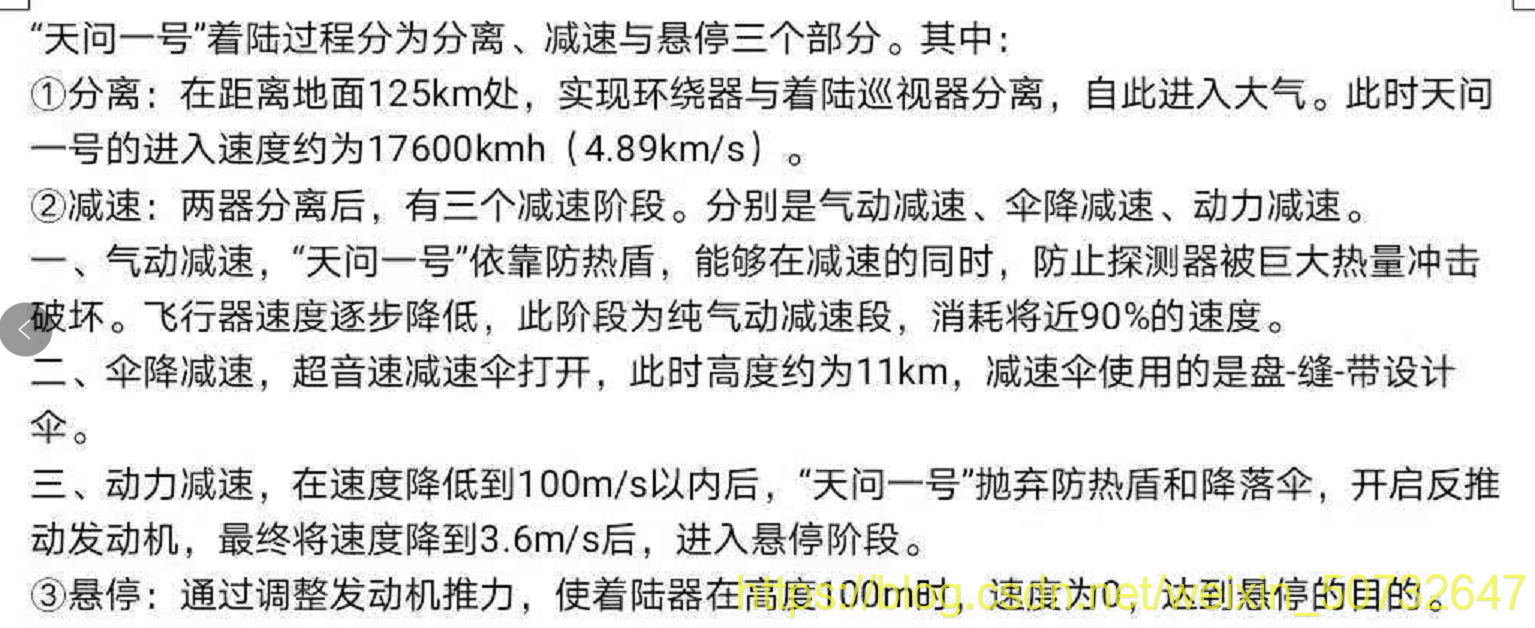
天問一號資料

思路
2021深圳杯A題 詳細思路
超詳細思路
從 探測器飛離地球到達目標火星 4個階段入手
即:
-
停泊分離段
-
過渡軌道段
-
動力下降段
-
最終著陸段
建立相應數學模型,并分析
PS:使用學長的思路可以節省很多時間,但不要完全依賴,祝大家比賽順利
這題第二問需要用到蟻群優化,這里給個簡單的蟻群demo
from mpl_toolkits.mplot3d import proj3d
from mpl_toolkits.mplot3d import Axes3D
import numpy as np
height3d = np.array([[2000,1400,800,650,500,750,1000,950,900,800,700,900,1100,1050,1000,1150,1300,1250,1200,1350,1500], [1100,900,700,625,550,825,1100,1150,1200,925,650,750,850,950,1050,1175,1300,1350,1400,1425,1450], [200,400,600,600,600,900,1200,1350,1500,1050,600,600,600,850,1100,1200,1300,1450,1600,1500,1400], [450,500,550,575,600,725,850,875,900,750,600,600,600,725,850,900,950,1150,1350,1400,1450], [700,600,500,550,600,550,500,400,300,450,600,600,600,600,600,600,600,850,1100,1300,1500], [500,525,550,575,600,575,550,450,350,475,600,650,700,650,600,600,600,725,850,1150,1450], [300,450,600,600,600,600,600,500,400,500,600,700,800,700,600,600,600,600,600,1000,1400], [550,525,500,550,600,875,1150,900,650,725,800,700,600,875,1150,1175,1200,975,750,875,1000], [800,600,400,500,600,1150,1700,1300,900,950,1000,700,400,1050,1700,1750,1800,1350,900,750,600], [650,600,550,625,700,1175,1650,1275,900,1100,1300,1275,1250,1475,1700,1525,1350,1200,1050,950,850], [500,600,700,750,800,1200,1600,1250,900,1250,1600,1850,2100,1900,1700,1300,900,1050,1200,1150,1100], [400,375,350,600,850,1200,1550,1250,950,1225,1500,1750,2000,1950,1900,1475,1050,975,900,1175,1450], [300,150,0,450,900,1200,1500,1250,1000,1200,1400,1650,1900,2000,2100,1650,1200,900,600,1200,1800], [600,575,550,750,950,1275,1600,1450,1300,1300,1300,1525,1750,1625,1500,1450,1400,1125,850,1200,1550], [900,1000,1100,1050,1000,1350,1700,1650,1600,1400,1200,1400,1600,1250,900,1250,1600,1350,1100,1200,1300], [750,850,950,900,850,1000,1150,1175,1200,1300,1400,1325,1250,1125,1000,1150,1300,1075,850,975,1100], [600,700,800,750,700,650,600,700,800,1200,1600,1250,900,1000,1100,1050,1000,800,600,750,900], [750,775,800,725,650,700,750,775,800,1000,1200,1025,850,975,1100,950,800,900,1000,1050,1100], [900,850,800,700,600,750,900,850,800,800,800,800,800,950,1100,850,600,1000,1400,1350,1300], [750,800,850,850,850,850,850,825,800,750,700,775,850,1000,1150,875,600,925,1250,1100,950], [600,750,900,1000,1100,950,800,800,800,700,600,750,900,1050,1200,900,600,850,1100,850,600]])
fig = figure()
ax = Axes3D(fig)
X = np.arange(21)
Y = np.arange(21)
X, Y = np.meshgrid(X, Y)
Z = -20*np.exp(-0.2*np.sqrt(np.sqrt(((X-10)**2+(Y-10)**2)/2)))+20+np.e-np.exp((np.cos(2*np.pi*X)+np.sin(2*np.pi*Y))/2)
ax.plot_surface(X, Y, Z, rstride=1, cstride=1, cmap='cool')
ax.set_xlabel('X axis')
ax.set_ylabel('Y axis')
ax.set_zlabel('Z')
ax.set_title('3D map')
point0 = [0,9,Z[0][9]]
point1 = [20,7,Z[20][7]]
ax.plot([point0[0]],[point0[1]],[point0[2]],'r',marker = u'o',markersize = 15)
ax.plot([point1[0]],[point1[1]],[point1[2]],'r',marker = u'o',markersize = 15)
x0,y0,_ = proj3d.proj_transform(point0[0],point0[1],point0[2], ax.get_proj())
x1,y1,_ = proj3d.proj_transform(point1[0],point1[1],point1[2], ax.get_proj())
label = pylab.annotate(
"start",
xy = (x0, y0), xytext = (-20, 20),
textcoords = 'offset points', ha = 'right', va = 'bottom',
bbox = dict(boxstyle = 'round,pad=0.5', fc = 'yellow', alpha = 1),
arrowprops = dict(arrowstyle = '->', connectionstyle = 'arc3,rad=0'),fontsize=15)
label2 = pylab.annotate(
"end",
xy = (x1, y1), xytext = (-20, 20),
textcoords = 'offset points', ha = 'right', va = 'bottom',
bbox = dict(boxstyle = 'round,pad=0.5', fc = 'yellow', alpha = 1),
arrowprops = dict(arrowstyle = '->', connectionstyle = 'arc3,rad=0'),fontsize=15)
def update_position(e):
x2, y2, _ = proj3d.proj_transform(point0[0],point0[1],point0[2],ax.get_proj())
label.xy = x2,y2
label.update_positions(fig.canvas.renderer)
x1,y1,_ = proj3d.proj_transform(point1[0],point1[1],point1[2],ax.get_proj())
label2.xy = x1,y1
label2.update_positions(fig.canvas.renderer)
fig.canvas.draw()
fig.canvas.mpl_connect('button_release_event', update_position)
思路獲取
關注下方公眾號,回復 深圳杯
獲取思路

轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/290333.html
標籤:其他
下一篇:?? 「 插入排序 」 ??