系列文章目錄
1.元件基礎
2.電路設計
3.PCB設計
4.元件焊接
5.板子除錯
6.程式設計
7.演算法學習
8.撰寫exe
9.檢測標準
10.專案舉例
文章目錄
- 前言
- PID演算法保姆級教程
- ①、PID演算法的決議
- ②、PID控制演算法講解
- ③、PID引數決議(一文讀懂PID并會除錯kp,ki,kd)(位置式+增量式PID)
- ④、STM32——PID恒溫控制(含C語言程式)
- ⑤、PID引數調節口訣
- ⑥、PID溫度控制引數整定方法
- ⑦、Matlab除錯
- ⑧、個人經驗
前言
一個普通專科生,拿什么拯救你的未來?
史上最詳細嵌入式系統設計師修煉手冊
嵌入式硬體軟體匯總
送給大學畢業后找不到奮斗方向的你(每周不定時更新)
上海市職業能力考試院
中國計算機技術職業資格網
上海市社會化評審職稱申報指南
PID演算法保姆級教程
①、PID演算法的決議
PID演算法的決議
②、PID控制演算法講解
通俗易懂的 PID 控制演算法講解
③、PID引數決議(一文讀懂PID并會除錯kp,ki,kd)(位置式+增量式PID)
PID引數決議(一文讀懂PID并會除錯kp,ki,kd)(位置式+增量式PID)
④、STM32——PID恒溫控制(含C語言程式)
STM32——PID恒溫控制
⑤、PID引數調節口訣
引數整定找最佳,從小到大順序查
先是比例后積分,最后再把微分加
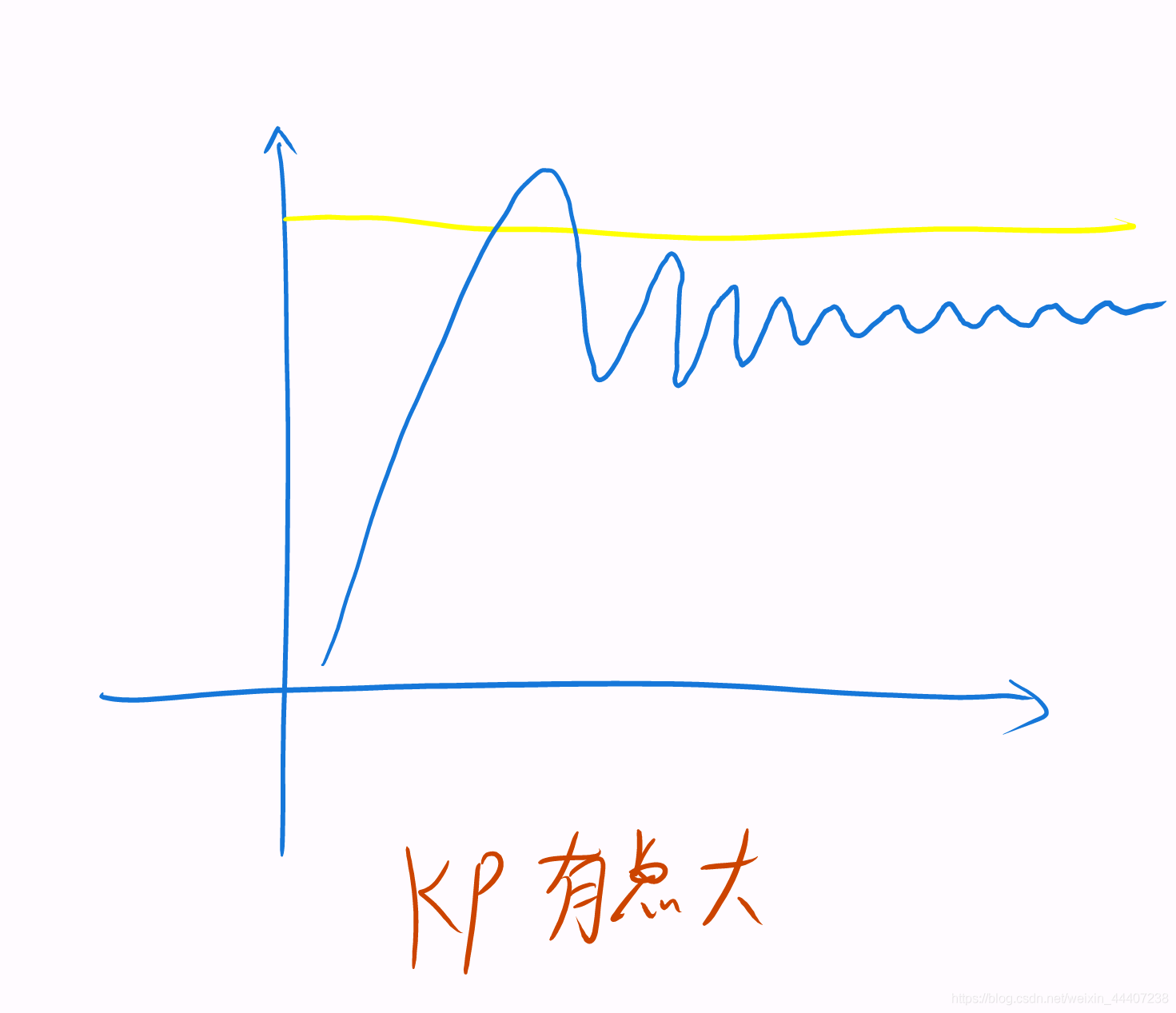
曲線振蕩很頻繁,比例度盤要放大
曲線漂浮繞大灣,比例度盤往小扳
曲線偏離回復慢,積分時間往下降
曲線波動周期長,積分時間再加長
曲線振蕩頻率快,先把微分降下來
動差大來波動慢,微分時間應加長
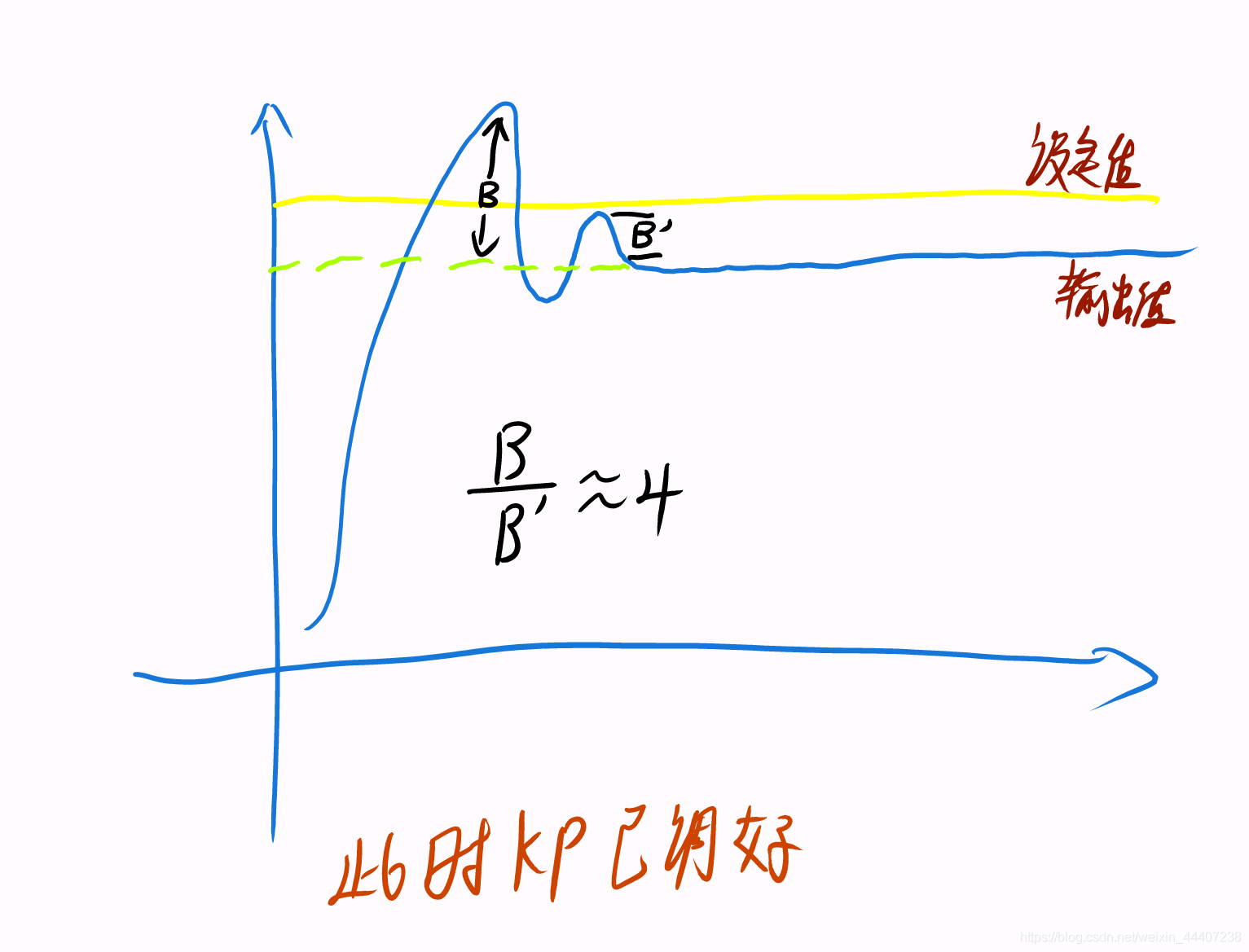
理想曲線兩個波,前高后低4比1
一看二調多分析,調節質量不會低
若要反應增快,增大P減小I;
若要反應減慢,減小P增大I;
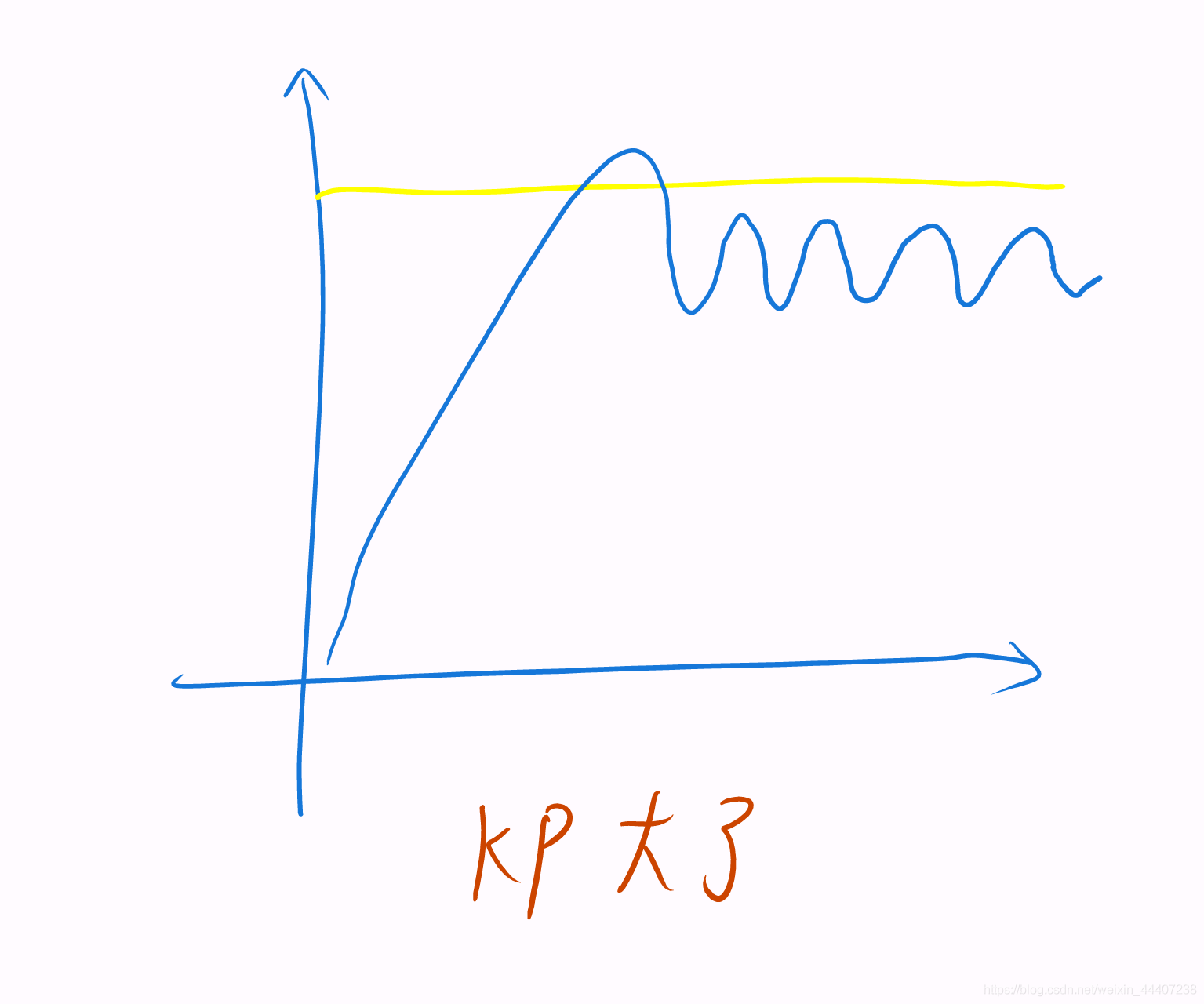
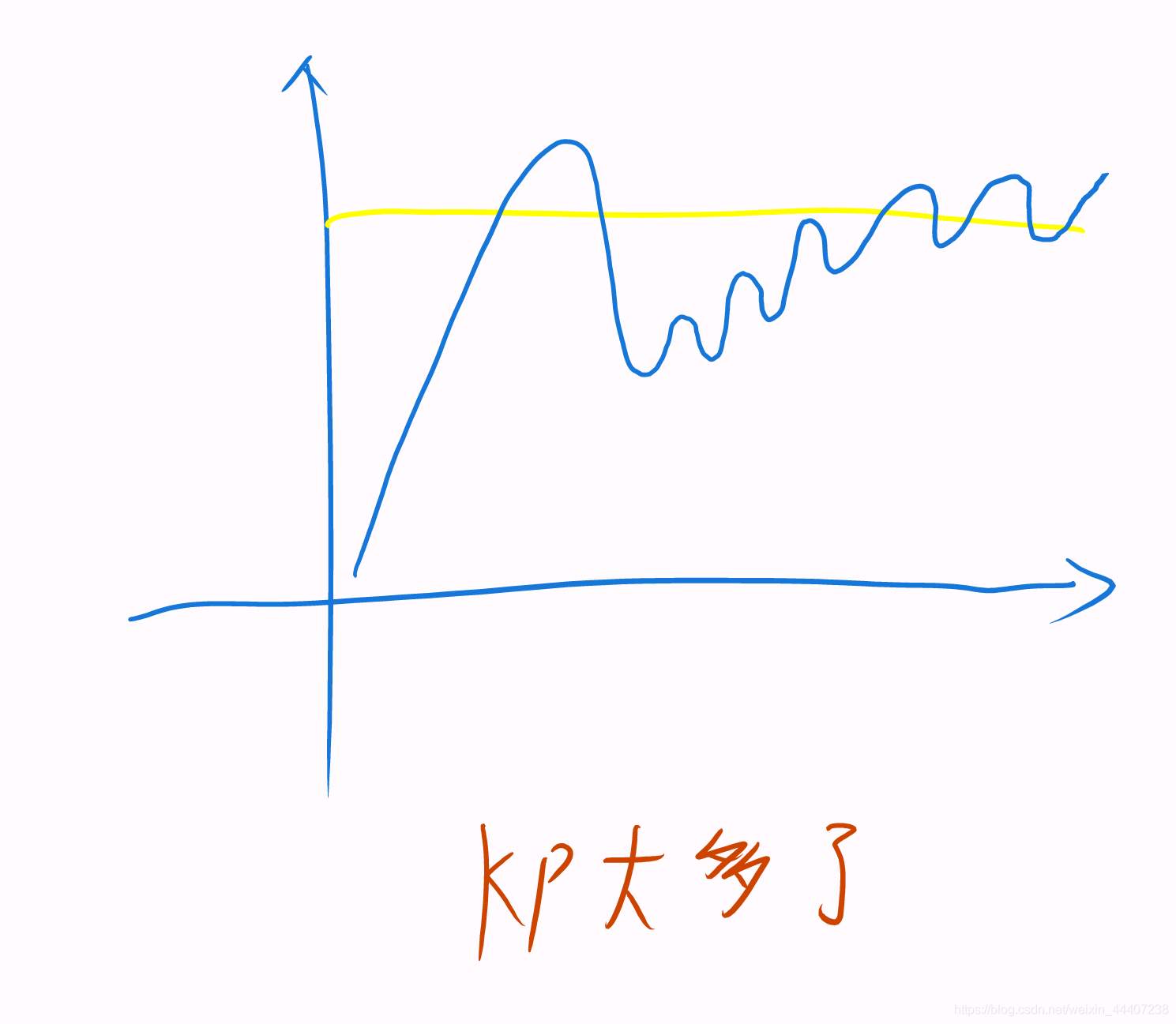
如果比例太大,會引起系統振蕩
如果積分太大,會引起系統遲鈍
⑥、PID溫度控制引數整定方法
先多看兩個,來點印象,再調
1、PID溫度控制引數整定方法
2、PID控制引數整定(調節方法)原理+圖示+MATLAB除錯
3、PID原理的詳細分析及調節程序
4、PID調節經驗
5、控溫設備的PID引數選定的個人方法(真實有效)
(1) 確定比例系數Kp
確定比例系數Kp時,首先去掉PID的積分項和微分項,可以令Ti=0、Td=0,使之成為
純比例調節,輸入設定為系統允許輸出最大值的60%~70%,比例系數Kp由0開始逐漸增
大,直至系統出現振蕩;再反過來,從此時的比例系數Kp逐漸減小,直至系統振蕩消失,
記錄此時的比例系數Kp,設定PID的比例系數Kp為當前值的60%~70%,
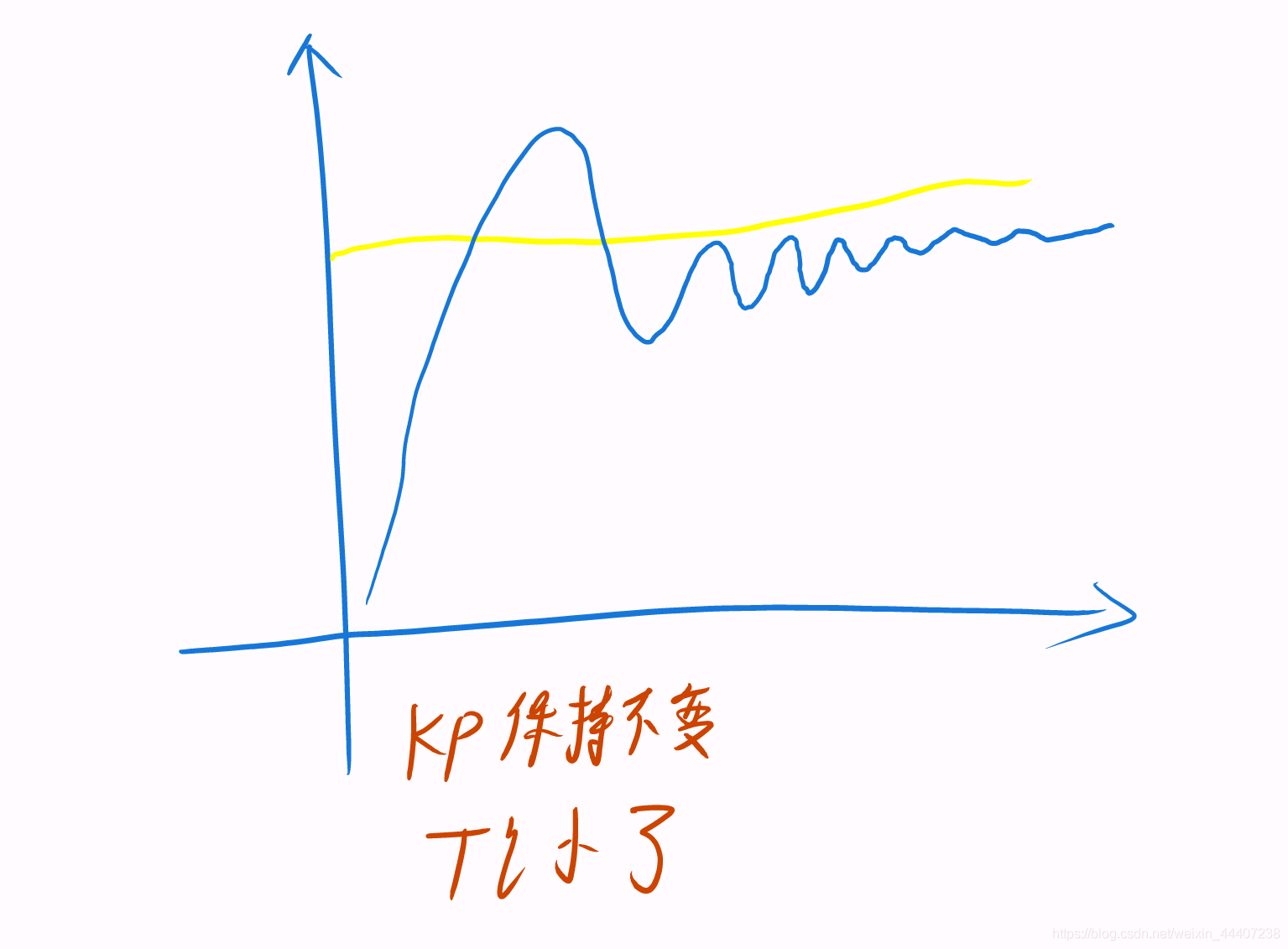
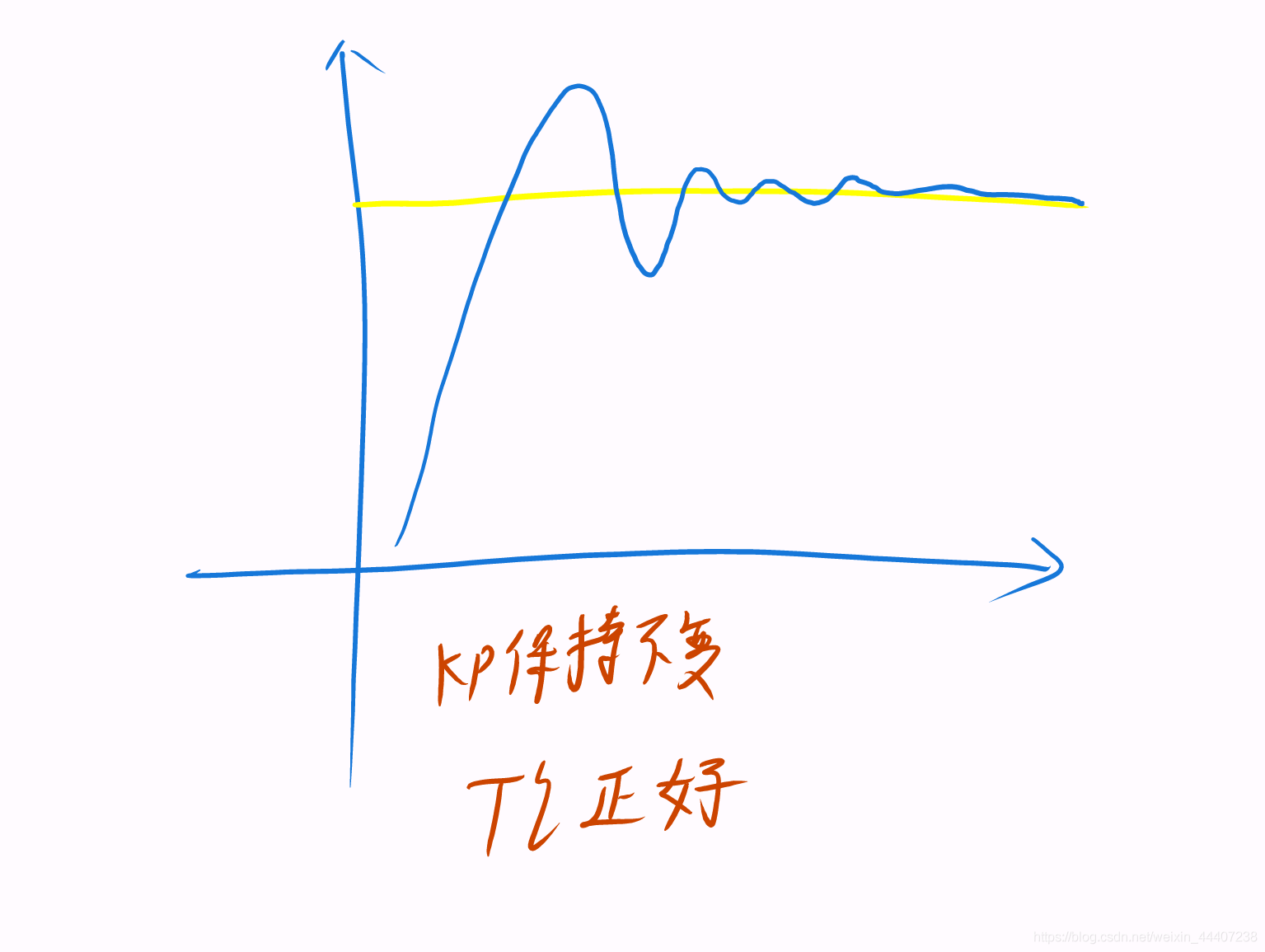
(2) 確定積分時間常數Ti
比例系數Kp確定之后,設定一個較大的積分時間常數Ti,然后逐漸減小Ti,直至系統出現
振蕩,然后再反過來,逐漸增大Ti,直至系統振蕩消失,記錄此時的Ti,設定PID的積分
時間常數Ti為當前值的150%~180%,
(3) 確定微分時間常數Td
微分時間常數Td一般不用設定,為0即可,此時PID調節轉換為PI調節,如果需要設定,
則與確定Kp的方法相同,取不振蕩時其值的30%,
(4) 系統空載、帶載聯調
對PID引數進行微調,直到滿足性能要求,
⑦、Matlab除錯
(1)、2016 matlab 中文版軟體和安裝教程
2016 matlab 中文版軟體和安裝教程
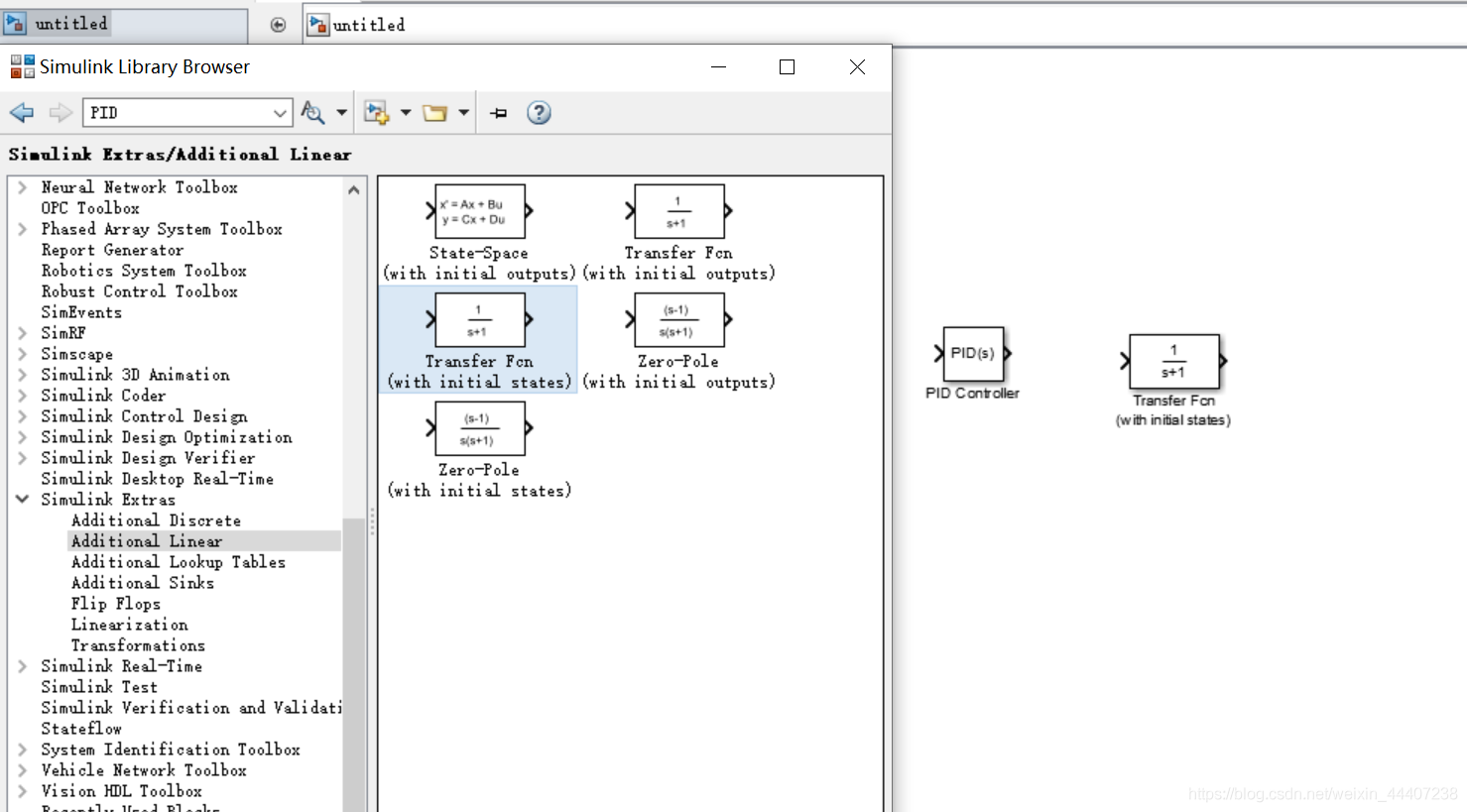
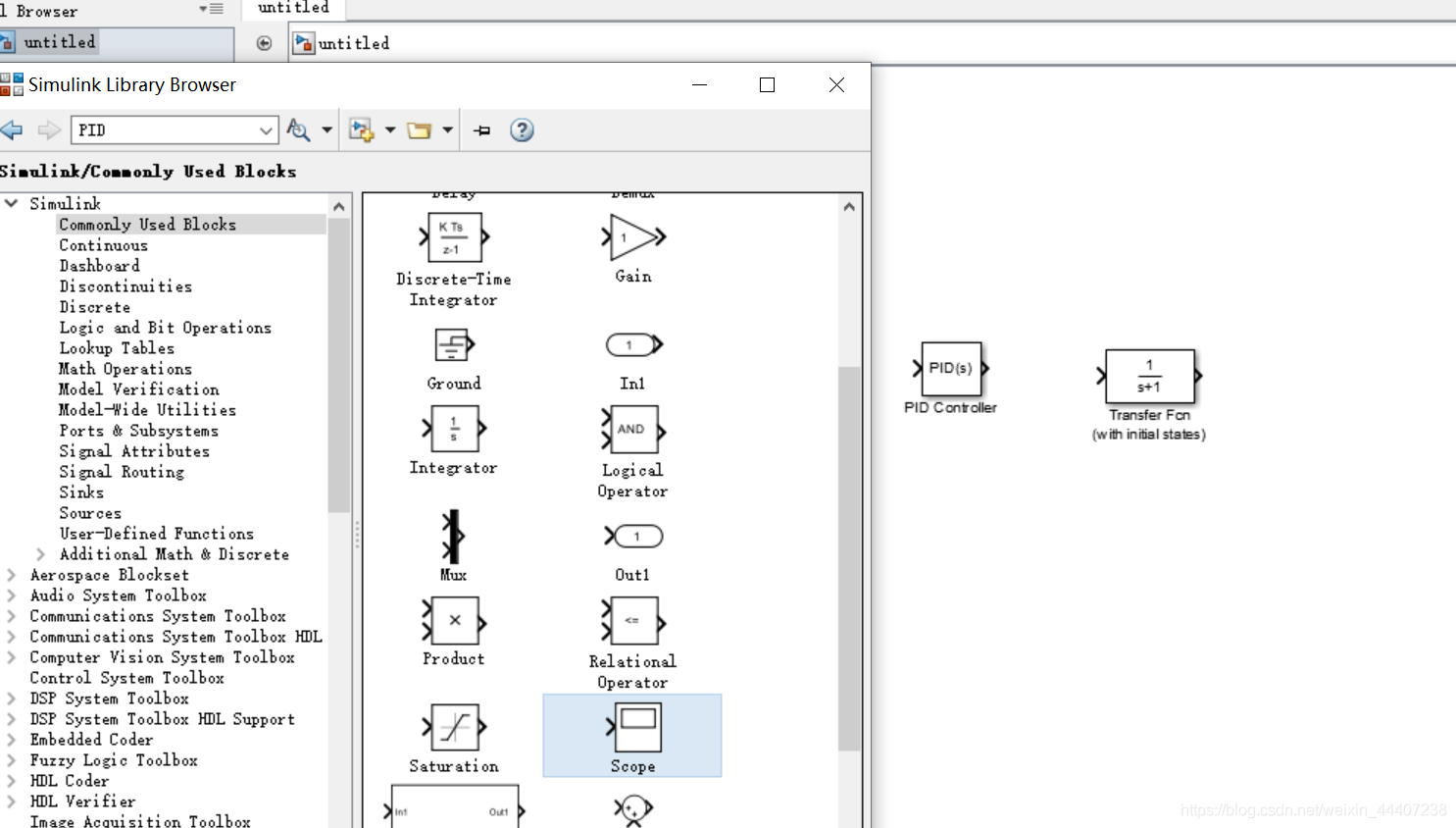
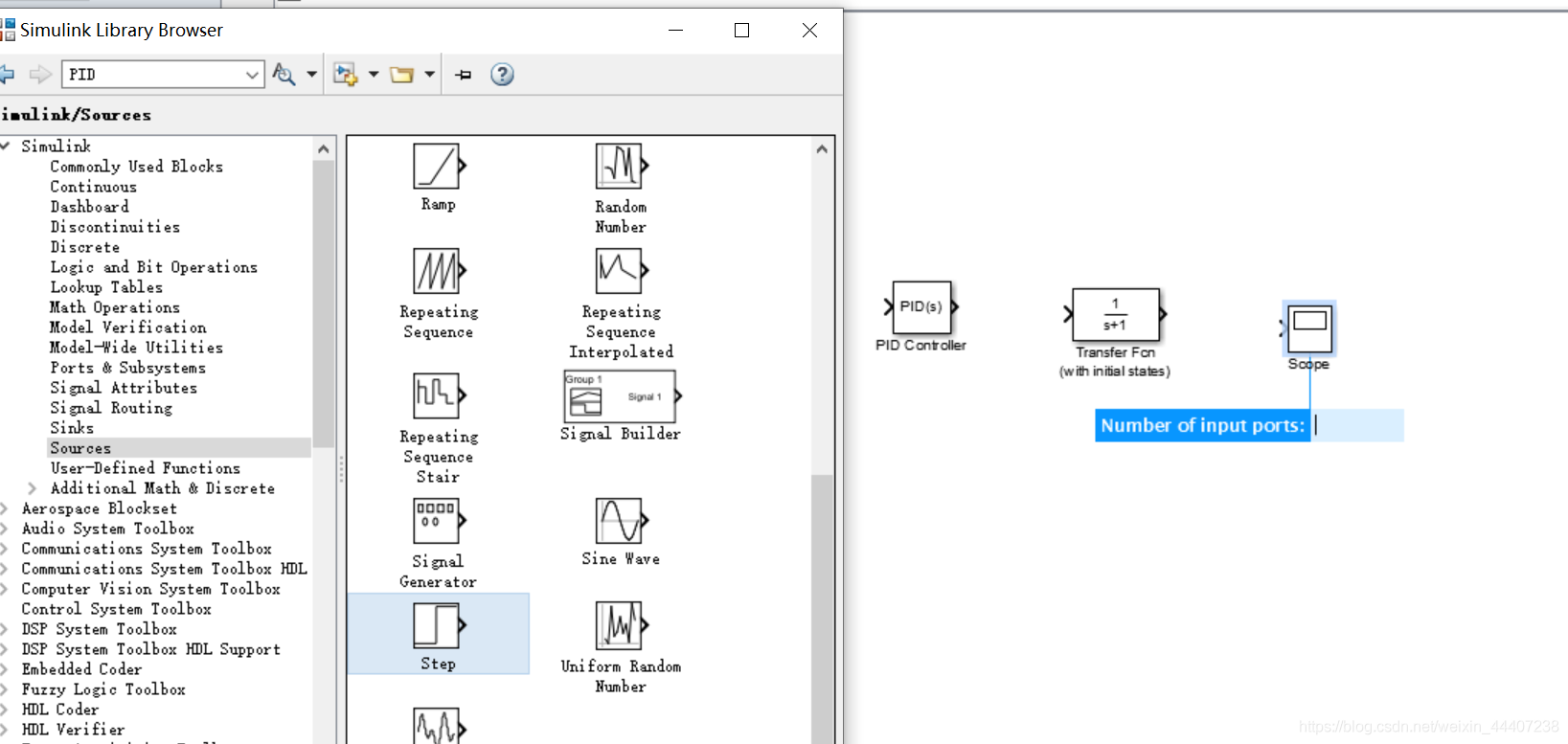
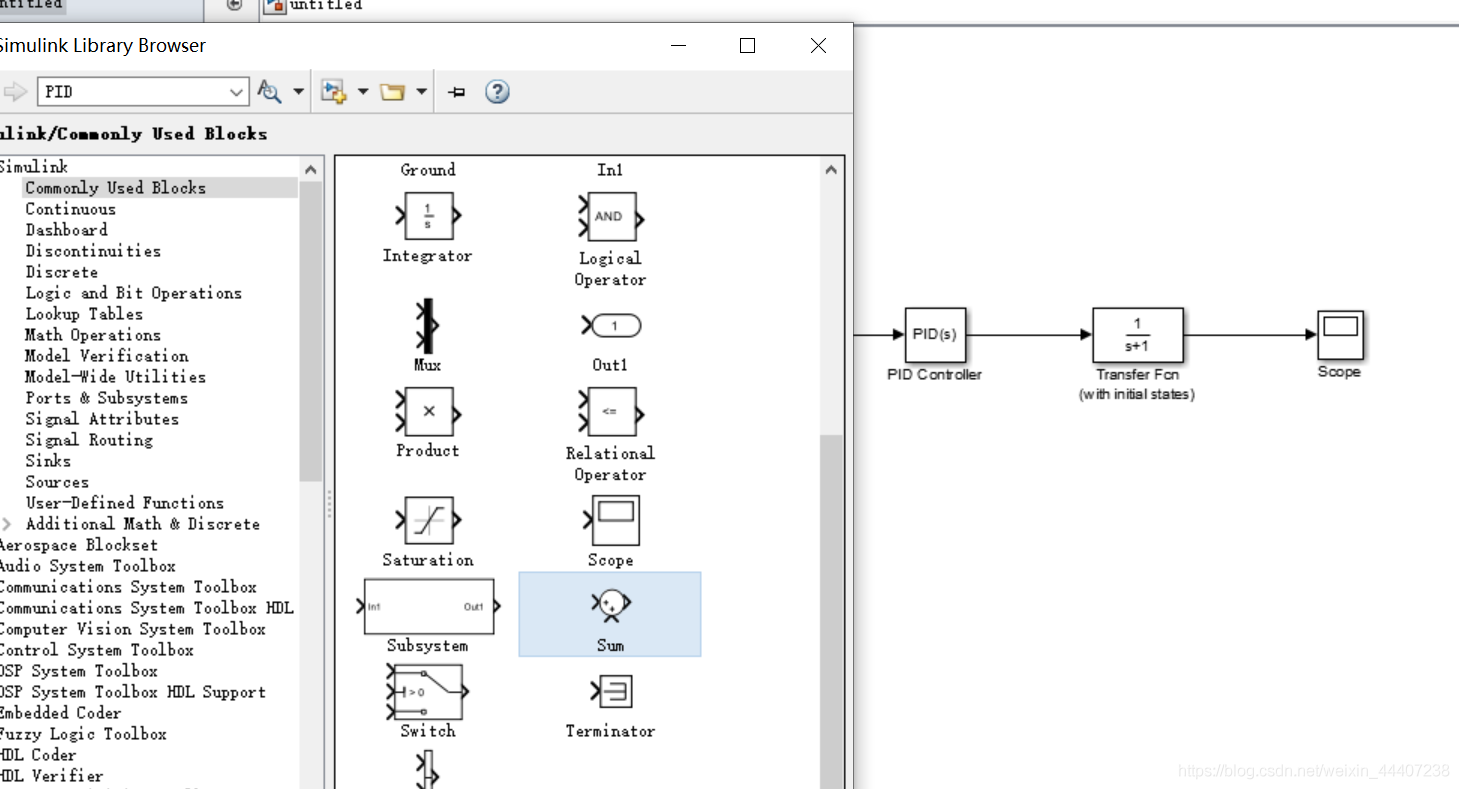
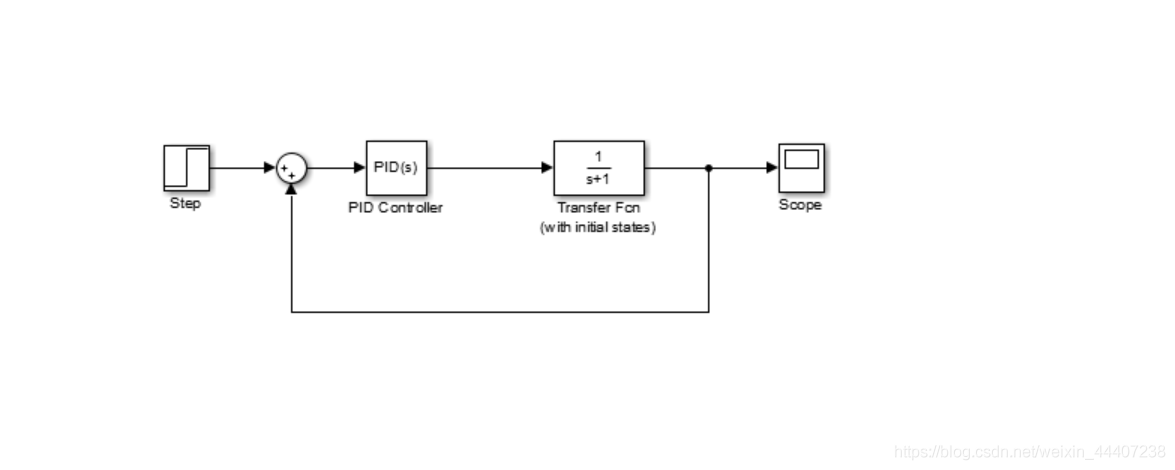
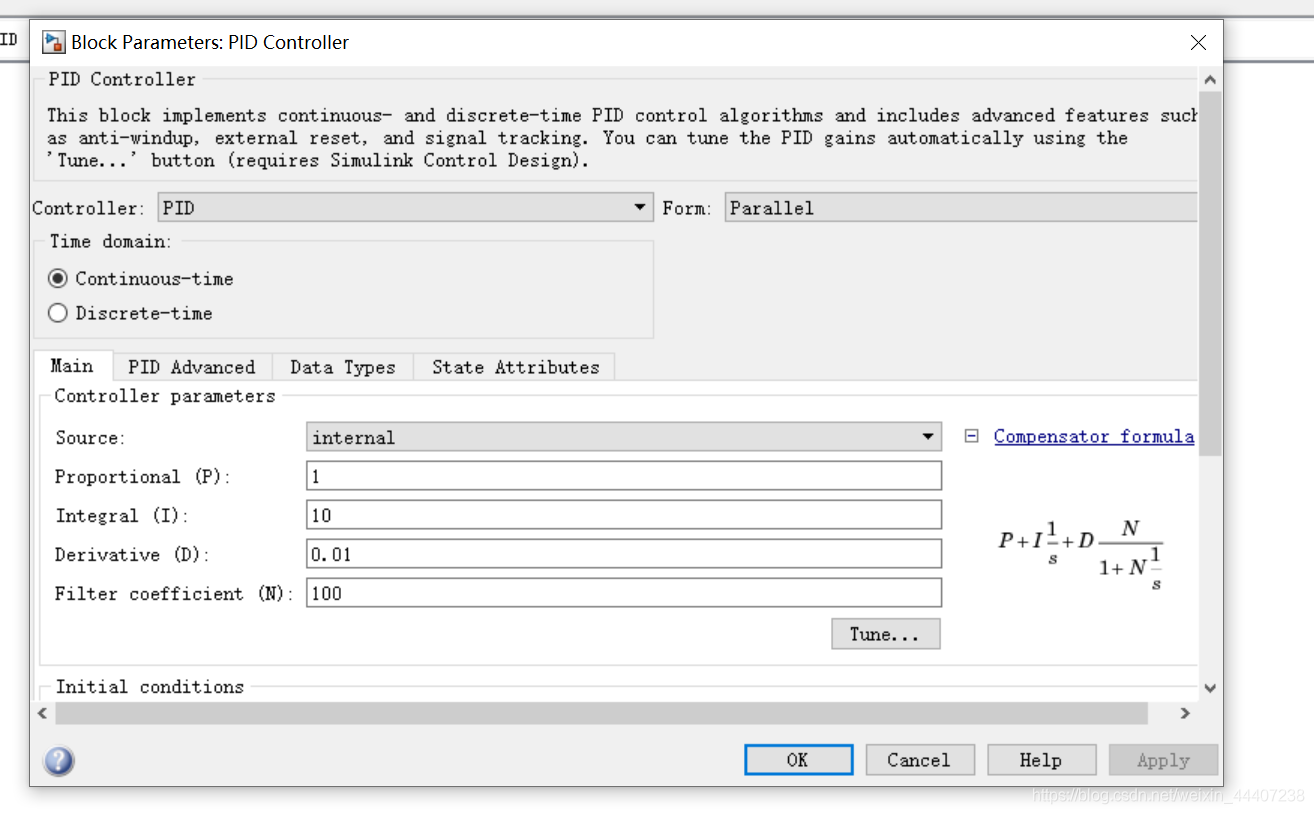
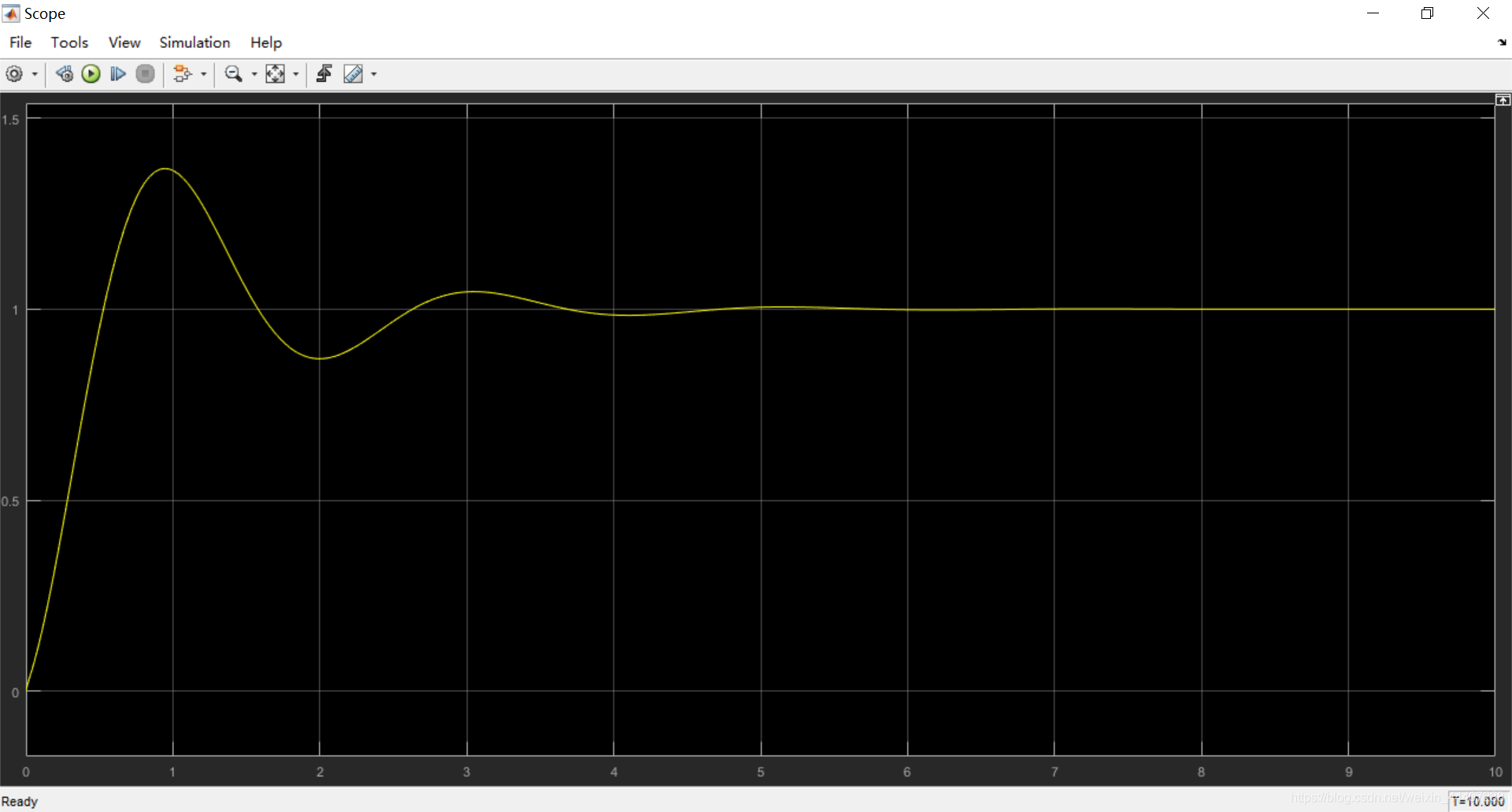
(2)matlab實作pid仿真
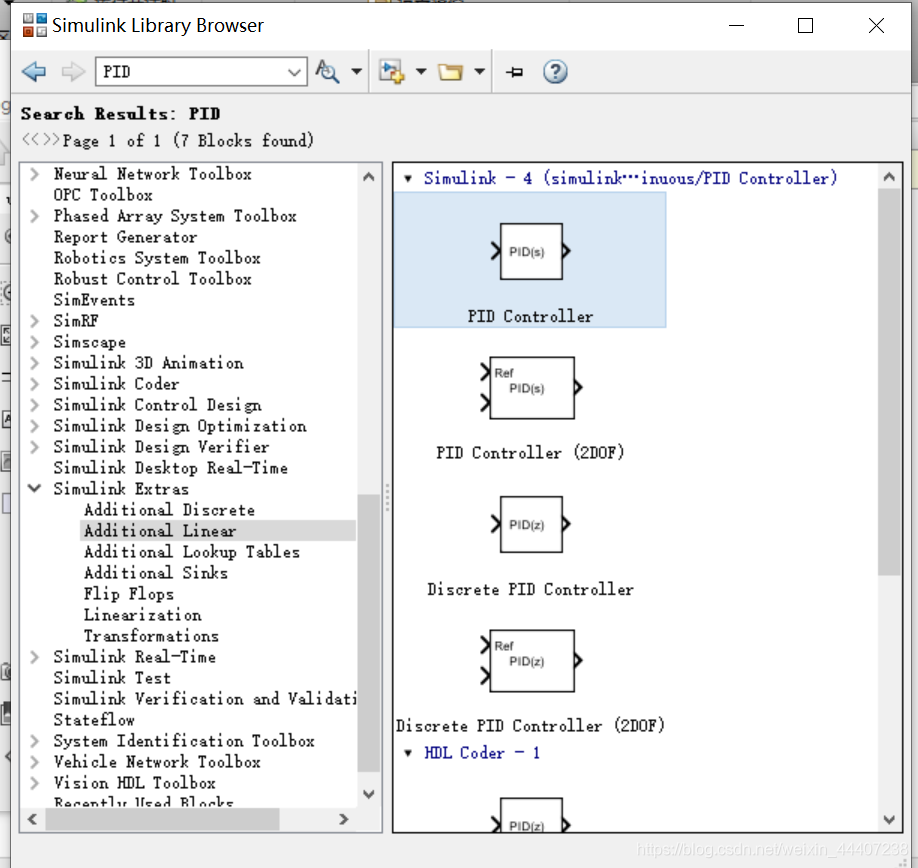
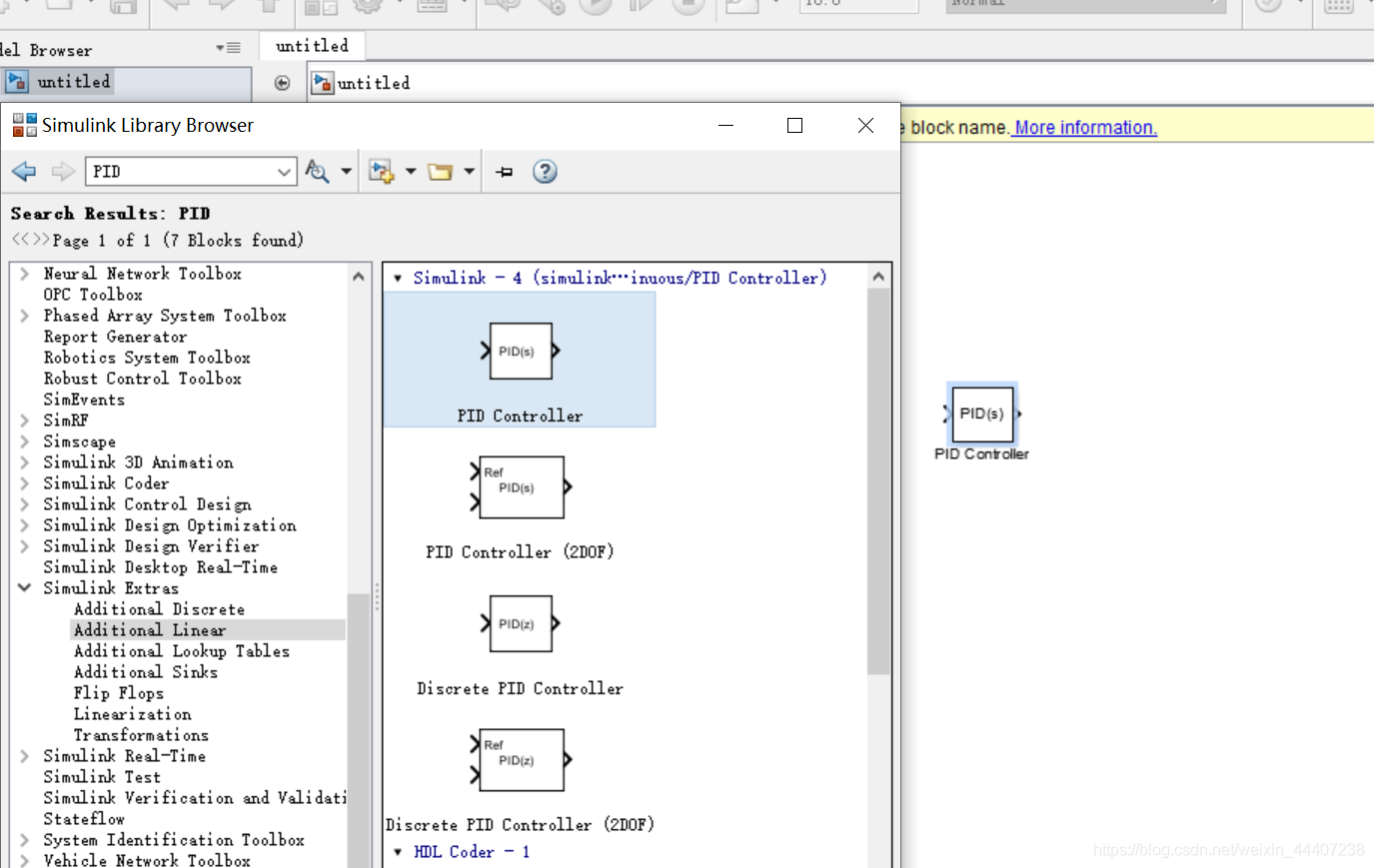
matlab實作pid仿真
搜索,PID
⑧、個人經驗
剛碰到這個東西的時候,也啥都不知道,跟著網上各種教程就瞎調,最侄訓真調出來了

(1)、首先先有程式,上面第四小節有,PID.c和PID.h可以直接用;講的還是比較細的,
(2)、程式只是套用,調還得自己花時間調,主要調KP,Ti和Td;
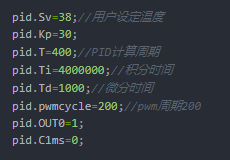
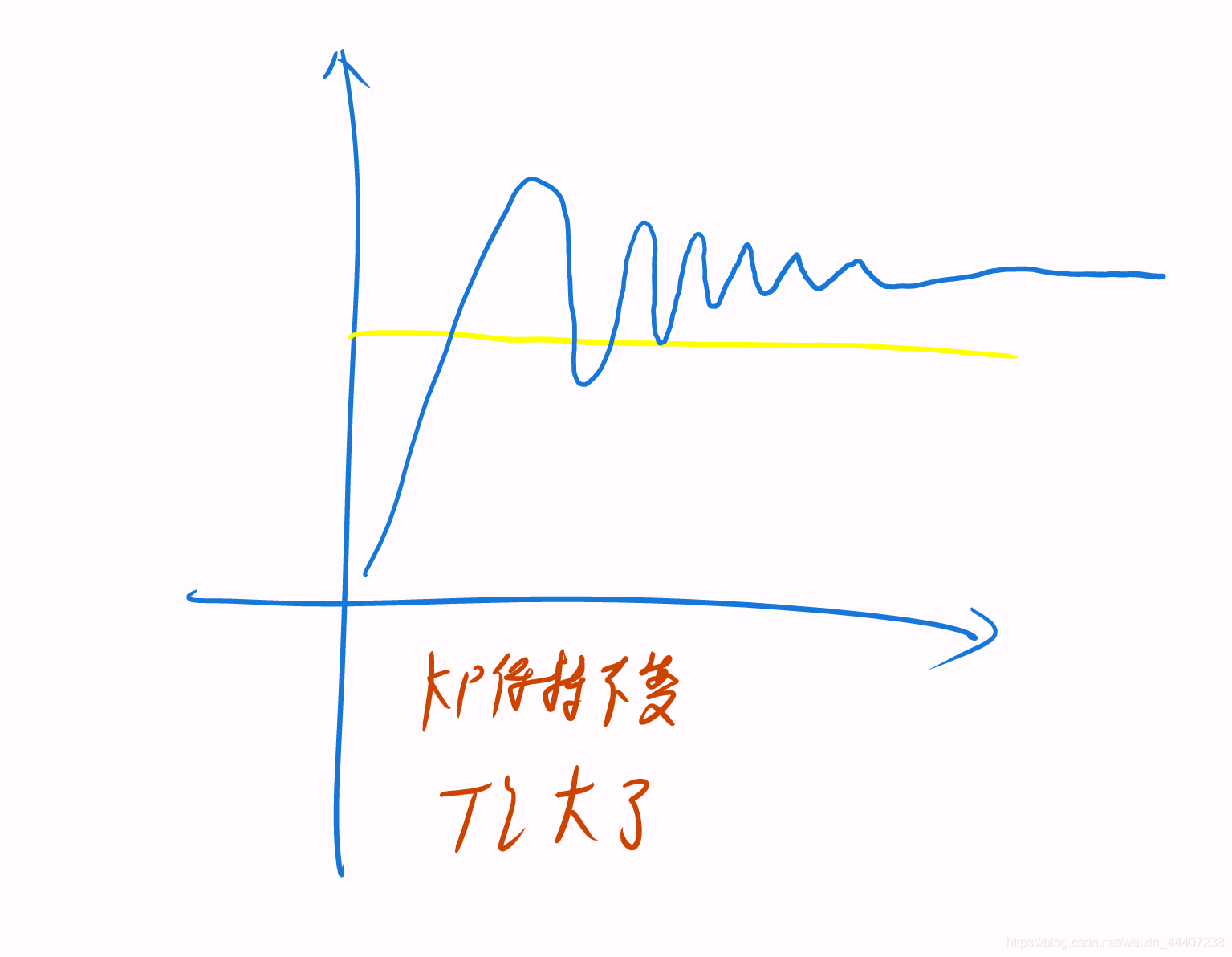
(3)、先把KP設為1,其他為0;看輸出波動情況
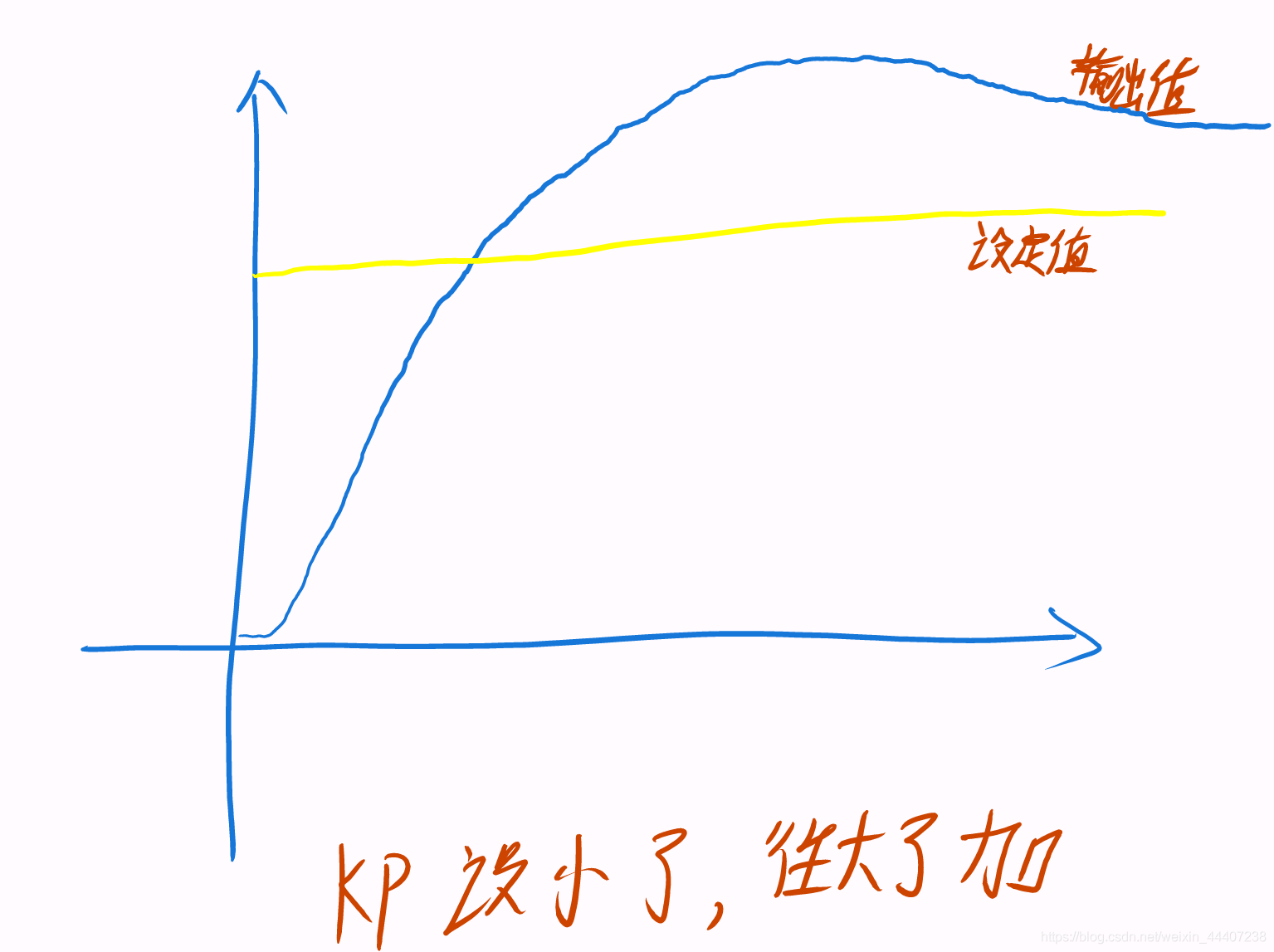
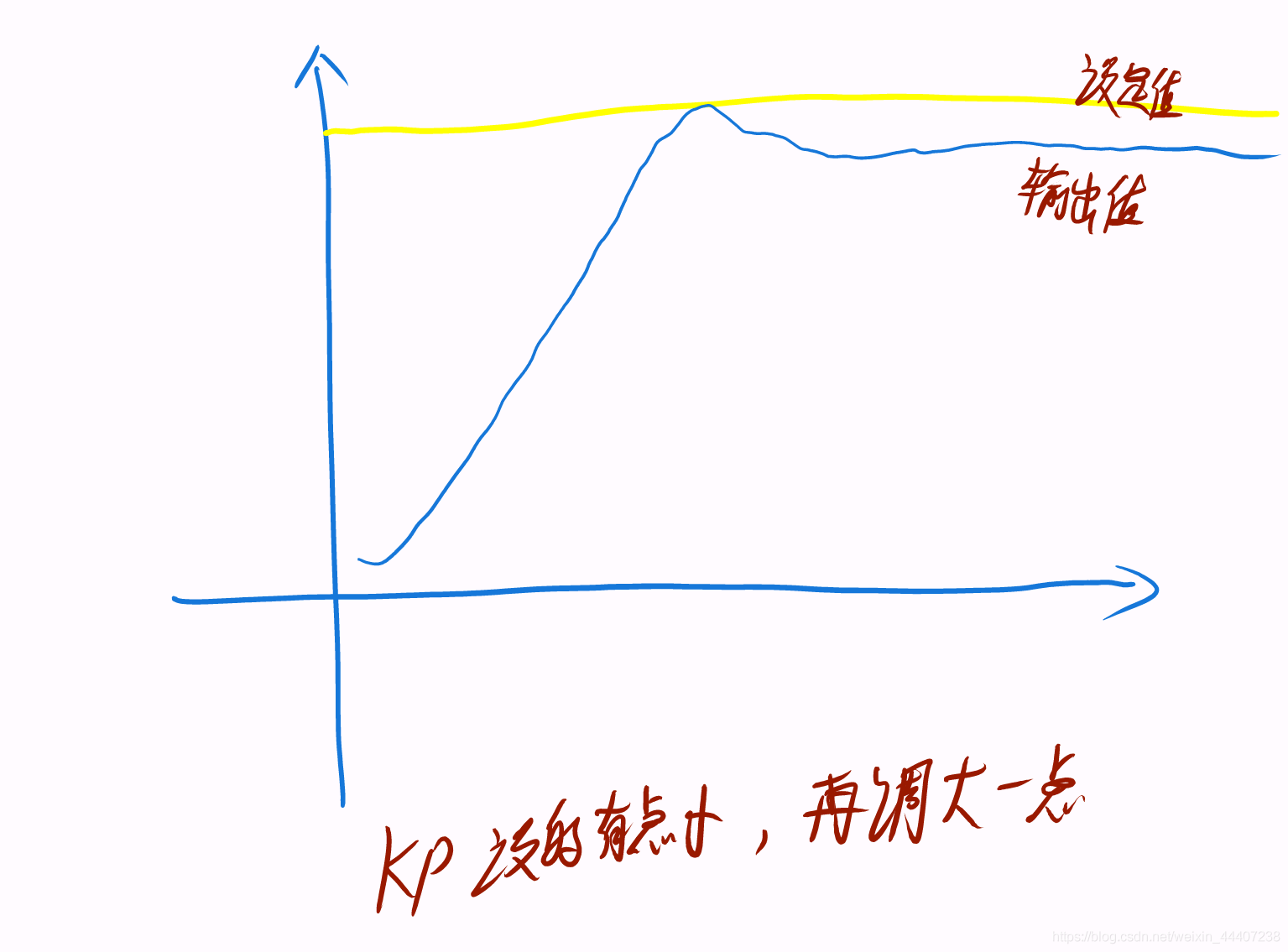
如果輸出的實際值一直緩慢上升,超過設定值了還上升,上升了好久才下來,這時應該是
KP設小了
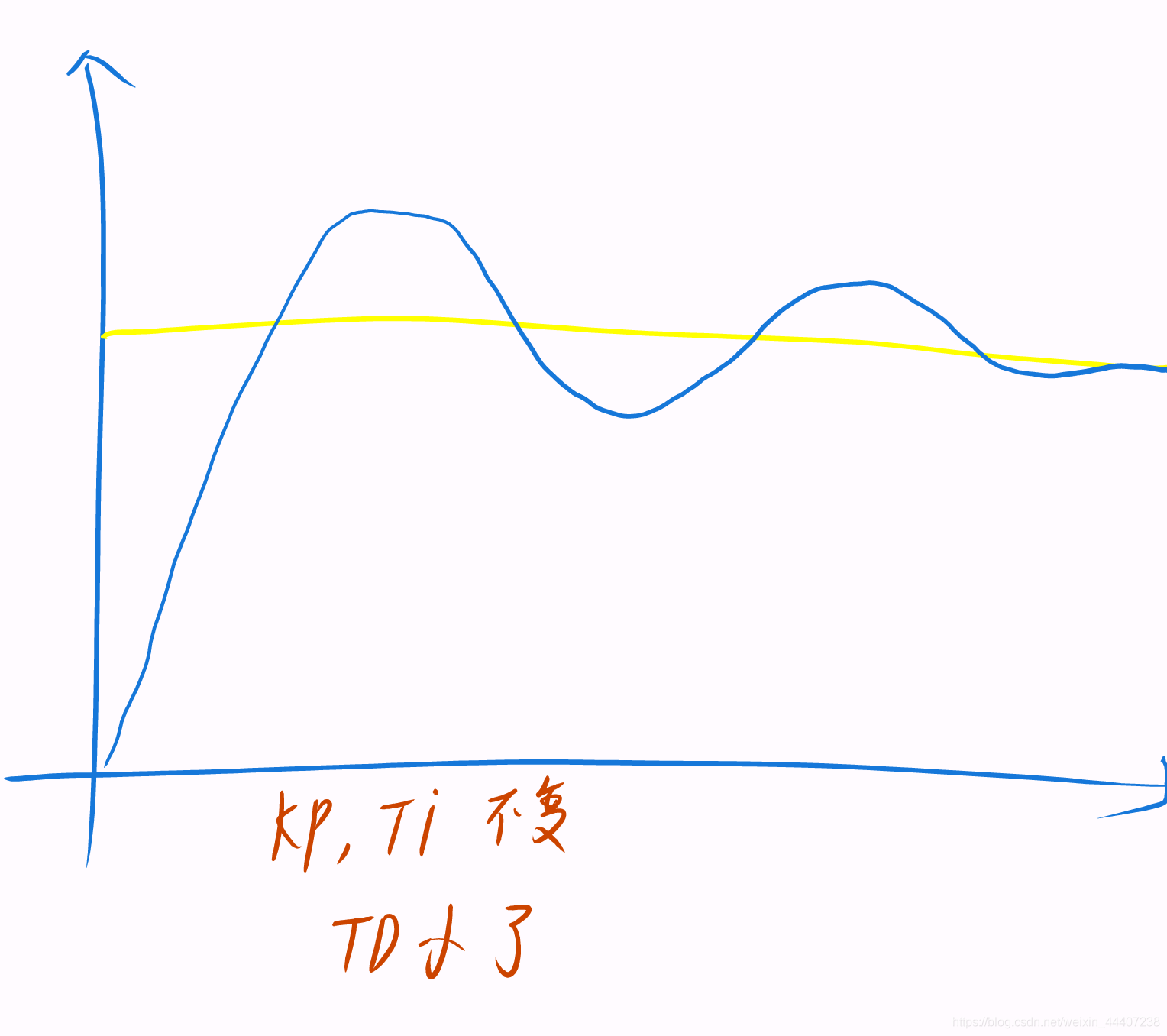
(4)、KP等于剛才的值不動,TI等于100000,TD還是0;
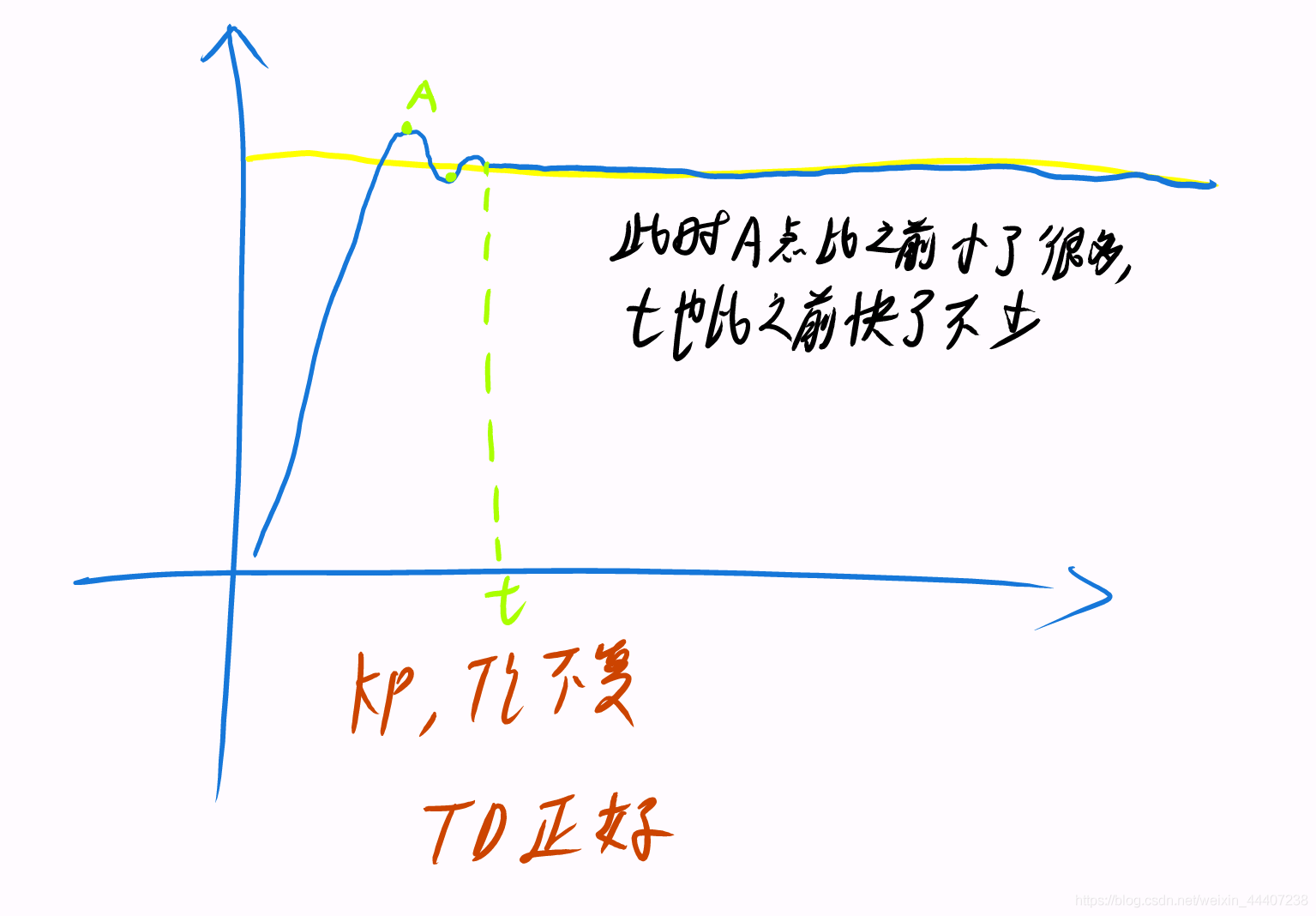
(5)、KP,TI等于剛才確定的值,TD等于1,
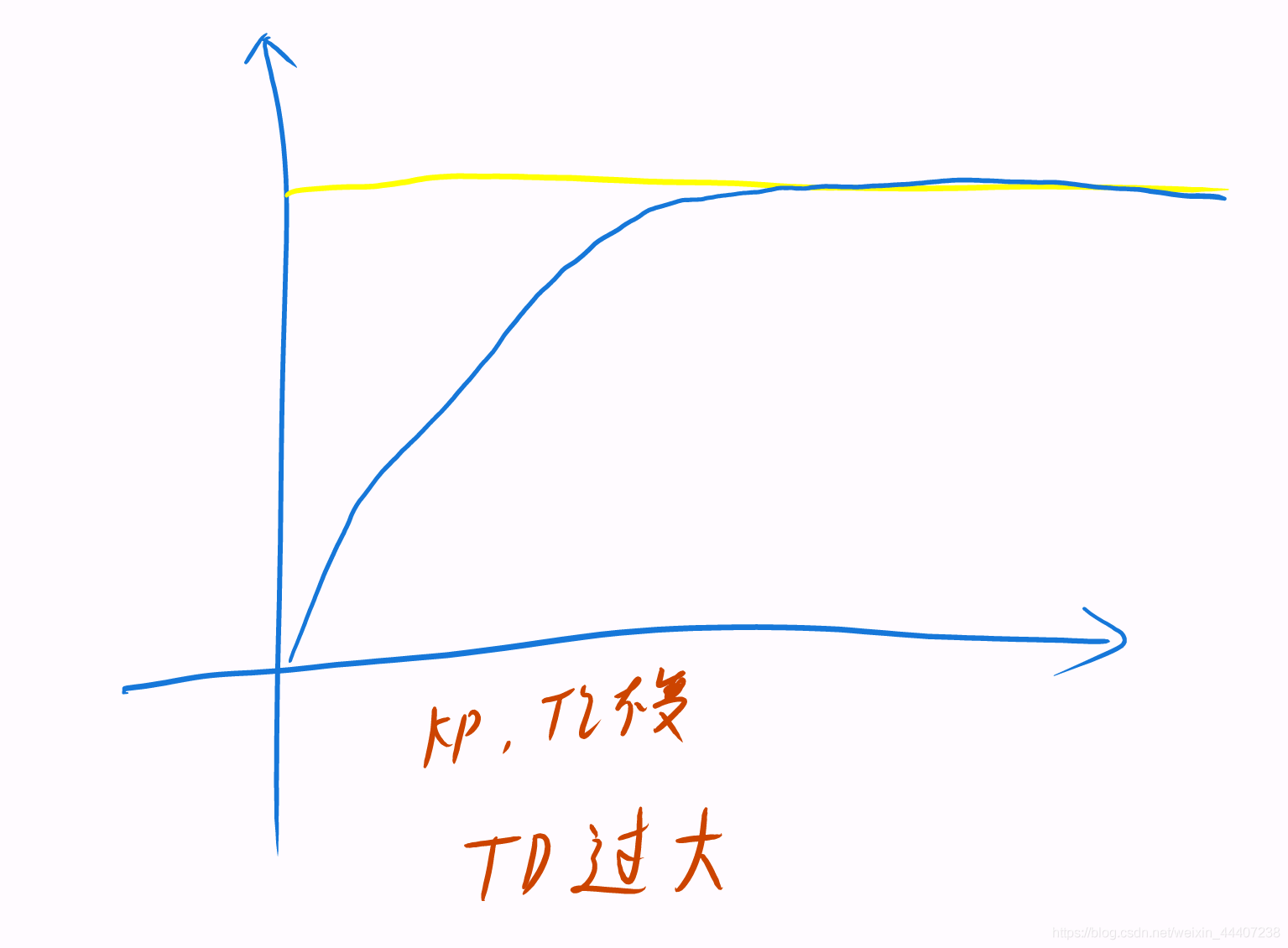
以上均為個人經驗,歡迎指正,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/291350.html
標籤:其他