目錄
前言
一、I/F控制是什么?
二、永磁同步電機的功角自平衡原理
三、實作思路
總結
前言
近年來無速度傳感器控制策略得到了深入的研究,按照適用的轉速范圍可以被分為兩類:低速無速度和高速無速度傳感器控制策略,低速的方法利用電機的凸極性,注入激勵來獲得電機的轉子位置資訊,高頻注入的效果當然是較好的,但是也存在噪聲,開發難度也相對較大,因此一種較為簡單的低速無速度的方法得到了廣泛的使用——I/F控制方式,(流頻比控制)
一、I/F控制是什么?
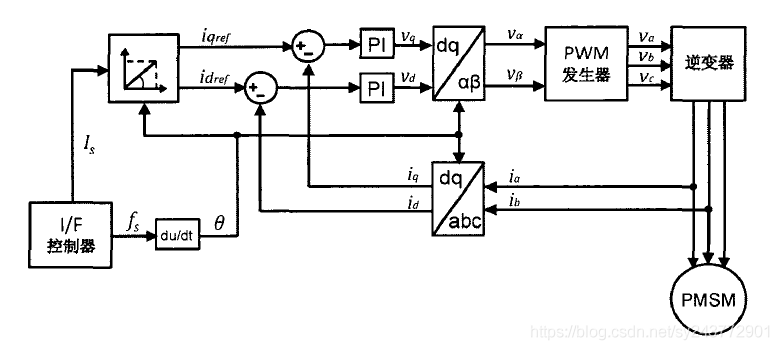
I/F控制是根據永磁同步電機的負載特性,給變頻器設定合適的電流-頻率比,使得電機輸出轉矩與不同轉速下的負載相匹配,以達到較高的運行效率,I/F控制策略運行在速度開環、電流倍訓的狀態,有PI調節器構成DQ軸坐標系下的電流倍訓,電流的反饋至收到期望值的約束,避免產生過流,其系統控制框圖如下圖所示,與有速度傳感器控制系統框圖存在較大區別:dq軸電流環給定電流idref 與 iqref 均來源于I/f控制器;不存在轉速;并且關鍵的一點是Park 變換與 反Park 變換的輸入位置信號 theta 同樣來源于I/F控制器,
如果從數學模型的角度對I/F進行剖析,將更好理解這種控制方式,永磁同步電機在dq軸坐標系下的電磁轉矩公式如下所示:

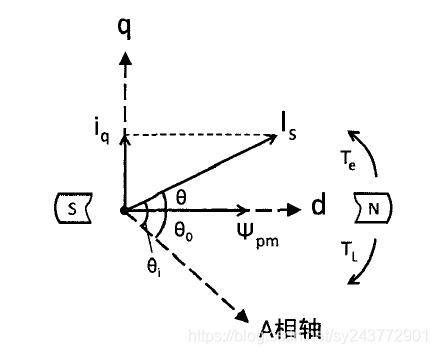
式中Is為定子電流矢量,phim為轉子磁鏈矢量,theta為定子電流矢量和轉子磁鏈矢量之間的夾角
二、永磁同步電機的功角自平衡原理
通過分析數學模型可知,永磁同步電機的輸出轉矩與定子電流iq分量成正比,控制定子電流的大小就可以控制輸出轉矩,在電磁轉矩和負載相平衡的時候,定子電流Is和轉子磁鏈pihm之間夾角保持固定,并且轉子在電流矢量的牽引下同步旋轉;如果電磁轉矩大于負載轉矩,轉子加速旋轉,夾角theta逐漸減小,電磁轉矩也逐漸減小,并在一個新的位置建立轉矩平衡;如果電磁轉矩小于負載轉矩,轉子減速旋轉,夾角theta逐漸增大,電磁轉矩也逐漸增大,同樣在一個新的位置建立轉矩平衡,如果這個theta角增大超過了90°還是沒辦法建立平衡,電機將失去穩定平衡,造成失步,
這里就需要詳細探究一下了?為什么電磁轉矩加速旋轉,夾角逐漸減小,能夠到一個新的位置建立轉矩平衡?為什么theta超過了90°電機將失去穩定平衡,造成失步呢?
這個就回到了上面那個公式上面去了,如果is矢量長度不變,磁鏈大小不變,電磁轉矩Te的輸出大小由sin(theta)的大小決定,可以空間想象一下,永磁同步電機的運轉本質是定子產生磁動勢拖動永磁體旋轉,就相當于是我有兩個磁鐵放地上,我可以控制其中一個旋轉,另一個會被這個拖著旋轉,在不同的相對位置轉動可旋轉的磁鐵,另一個磁鐵跟隨旋轉的快速性不一樣,這就是theta影響的,
那首先研究一下加速程序,假如控制可旋轉磁鐵開始旋轉,并且電流矢量和磁鏈的初始角度theta = 0°,sin(theta)= 0 ,因此初始的時候沒有任何的轉矩,可旋轉磁鐵對被拖動磁鐵沒有任何作用力,但是隨著旋轉磁鐵的轉動,他們之間相對的角度出現了變化,theta就會開始增大,sin(theta)開始變大,因此開始出現轉矩,誒,這個時候被拖動磁鐵也不一定旋轉,他和地面還有摩擦力在阻撓,那么這個theta還會繼續增大,直到產生的轉矩能夠使得克服摩擦力和可旋轉磁鐵一起轉起來,如果到達了 sin(theta)的最大值,拉力還是小于摩擦力,那這個時候就轉不起了,也就是無法到達穩定平衡狀態了,考慮到加減速兩個程序,因此可以得到永磁同步電機I/F啟動的可達平衡條件,這個條件就是功角自平衡的范圍,超出了這個范圍電機的運行將無法到達穩定,這個條件無論是有速度傳感器控制,還是I/F開環控制都是符合的,矢量控制由于時時刻刻有位置從傳感器傳過來,為了保持時刻為最大轉矩輸出,但是I/F的角度是自己給的,所以就需要考慮這個范圍,
三、實作思路
根據上述的分析,在實作的程序中必須滿足功角自平衡條件,在仿真程序中,先把電流內環建立好,然后1、給定一個電流Is;2、給定一個轉速,并且將轉速積分得到角度,給到park變換和反park變換,考慮到以下幾點:
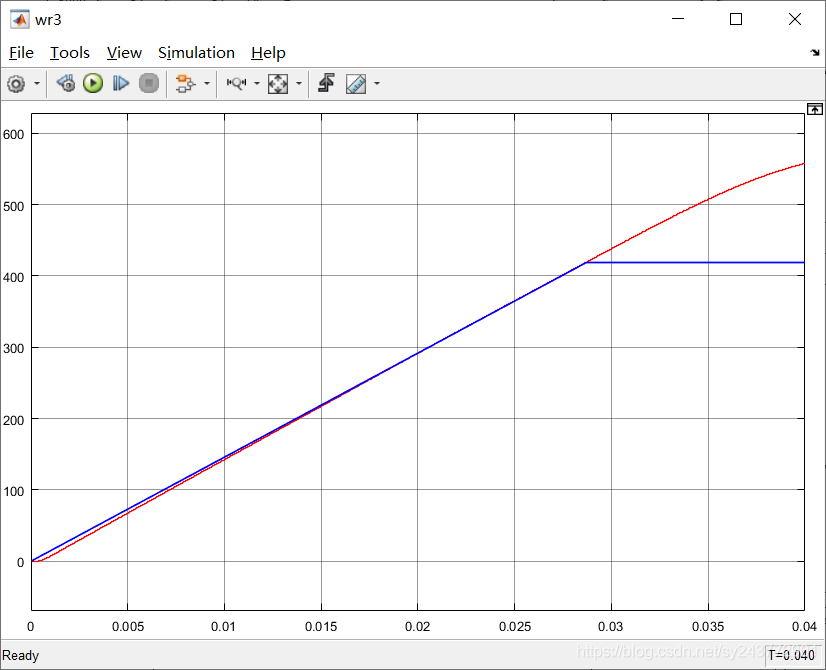
1、實際電機運轉程序中,需要經歷恒加速階段,不同的電流對應不同的轉矩,因此也對應不同的加速度,例如我現在用的電機引數里面,轉動慣量 J = 0.003,永磁磁鏈強度為0.1827,額定電流為10A,極對數為4,額定轉矩為10.96N,因此忽略摩擦阻力與空載的情況下,恒加速階段加速度為10.96*4/0.003 = 14613rad/s^2(這個是電角加速度),電機額定轉速為1000rpm,等于104.7rad/s(機械角速度),418.8rad/s(電角速度),因此到達額定轉速的時間是0.0287s,
2、設定輸入速度為
3、對電角速度積分,得到位置信號,并將其匯入到坐標變換中,看看效果,圖中藍色線條為給定轉速,紅色為實際轉速,可以看到仿真結果實作了I/F的啟動,在實作I/F啟動的基礎上,就可以做高速的無速度傳感器控制了,
總結
I/F啟動方式是一種轉速開環,電流倍訓的無速度傳感器控制啟動方式,這種方式能夠提供一種較為容易實作的啟動策略,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/291909.html
標籤:其他