文章目錄
- 0.前言
- 1.一階卡爾曼濾波代碼實作
- 1.1 Kalman濾波代碼
- 1.1.1 Kalman.c檔案
- 1.1.2 Kalman.h檔案
- 2.一階卡爾曼濾波代碼應用
- 2.1 在源程式中加入.c/.h檔案
- 2.2 Kalman應用
- 2.3 Kalman在穩定CPU溫度傳感器讀數效果展示
- 2.4 Kalman在穩定紅外傳感器讀數效果展示
- 3.一階卡爾曼濾波代碼調參
- 3.1 直觀上將數學公式與代碼一一對應
- 3.2 紙質版個人理解
- 3.3 參考理解
0.前言
可以先進行這兩篇的理解和配置再開始一階卡爾曼濾波的實踐,
STM32應用(三)一階卡爾曼濾波原理和ADC讀取紅外測距模塊的數值
STM32應用(五)基于輸入捕獲的超聲波HC-SR04模塊使用
1.一階卡爾曼濾波代碼實作
1.1 Kalman濾波代碼
1.1.1 Kalman.c檔案
#include "Kalman.h"
void Kalman_Init()
{
kfp.Last_P = 1;
kfp.Now_P = 0;
kfp.out = 0;
kfp.Kg = 0;
kfp.Q = 0;
kfp.R = 0.01;
}
/**
*卡爾曼濾波器
*@param Kalman *kfp 卡爾曼結構體引數
* float input 需要濾波的引數的測量值(即傳感器的采集值)
*@return 濾波后的引數(最優值)
*/
float KalmanFilter(Kalman *kfp,float input)
{
//預測協方差方程:k時刻系統估算協方差 = k-1時刻的系統協方差 + 程序噪聲協方差
kfp->Now_P = kfp->Last_P + kfp->Q;
//卡爾曼增益方程:卡爾曼增益 = k時刻系統估算協方差 / (k時刻系統估算協方差 + 觀測噪聲協方差)
kfp->Kg = kfp->Now_P / (kfp->Now_P + kfp->R);
//更新最優值方程:k時刻狀態變數的最優值 = 狀態變數的預測值 + 卡爾曼增益 * (測量值 - 狀態變數的預測值)
kfp->out = kfp->out + kfp->Kg * (input -kfp->out);//因為這一次的預測值就是上一次的輸出值
//更新協方差方程: 本次的系統協方差付給 kfp->LastP 威下一次運算準備,
kfp->Last_P = (1-kfp->Kg) * kfp->Now_P;
return kfp->out;
}
1.1.2 Kalman.h檔案
#ifndef Kalman_H
#define Kalman_H
#include "main.h"
typedef struct
{
float Last_P;//上次估算協方差 不可以為0 ! ! ! ! !
float Now_P;//當前估算協方差
float out;//卡爾曼濾波器輸出
float Kg;//卡爾曼增益
float Q;//程序噪聲協方差
float R;//觀測噪聲協方差
}Kalman;
void Kalman_Init(void);
float KalmanFilter(Kalman *kfp,float input);
extern Kalman kfp;
#endif
2.一階卡爾曼濾波代碼應用
2.1 在源程式中加入.c/.h檔案
在Keil中添加新的檔案
2.2 Kalman應用
/* USER CODE BEGIN Includes */
#include "Kalman.h"
/* USER CODE END Includes */
/* USER CODE BEGIN PV */
extern Kalman kfp;
/* USER CODE END PV */
/* USER CODE BEGIN 2 */
Kalman_Init();
/* USER CODE END 2 */
while (1)
{
KalmanFilter(&kfp,supersonic.distance);
printf("%f",supersonic.distance);
HAL_Delay(100);
}
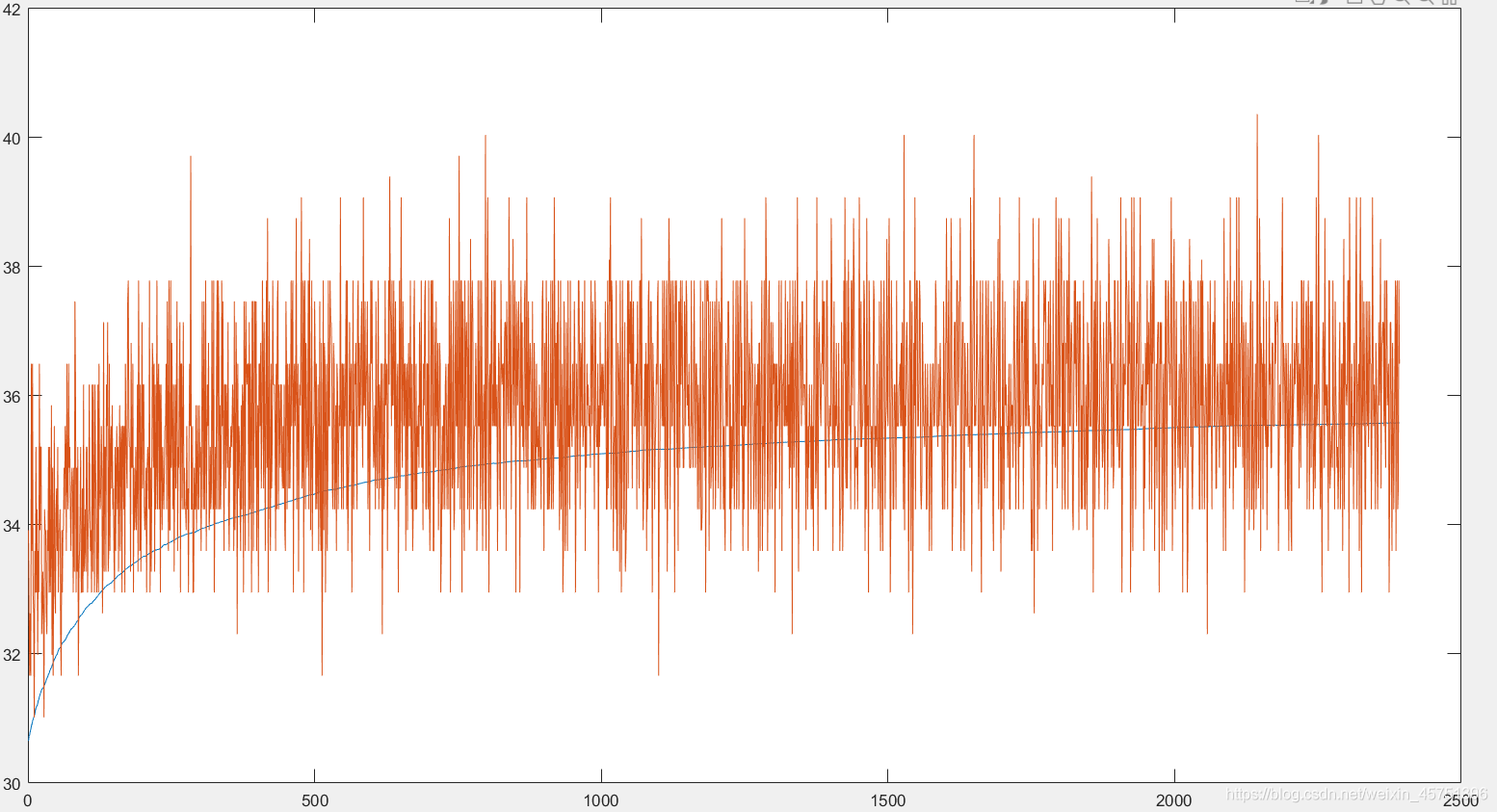
2.3 Kalman在穩定CPU溫度傳感器讀數效果展示
STM32F407內部溫度傳感器實驗
//引數配置
void Kalman_Init()
{
kfp.Last_P = 1;
kfp.Now_P = 0;
kfp.out = 0;
kfp.Kg = 0;
kfp.Q = 0;
kfp.R = 0.01;
}
while:
float Last_ADC_Value;
HAL_ADC_Start(&hadc1);
Last_ADC_Value=HAL_ADC_GetValue(&hadc1);
HAL_Delay(5);
Last_ADC_Value=KalmanFilter(&kfp,Last_ADC_Value);
Tempture_Value=Last_ADC_Value*(3.3/4096); //電壓值
Tempture_Value=(Tempture_Value-0.76)/0.0025+25;
printf("%f\r\n", Tempture_Value);
HAL_Delay(10);
程色波動的資料是沒有添加Kalman濾波的效果,淺藍色的資料是添加后的效果,
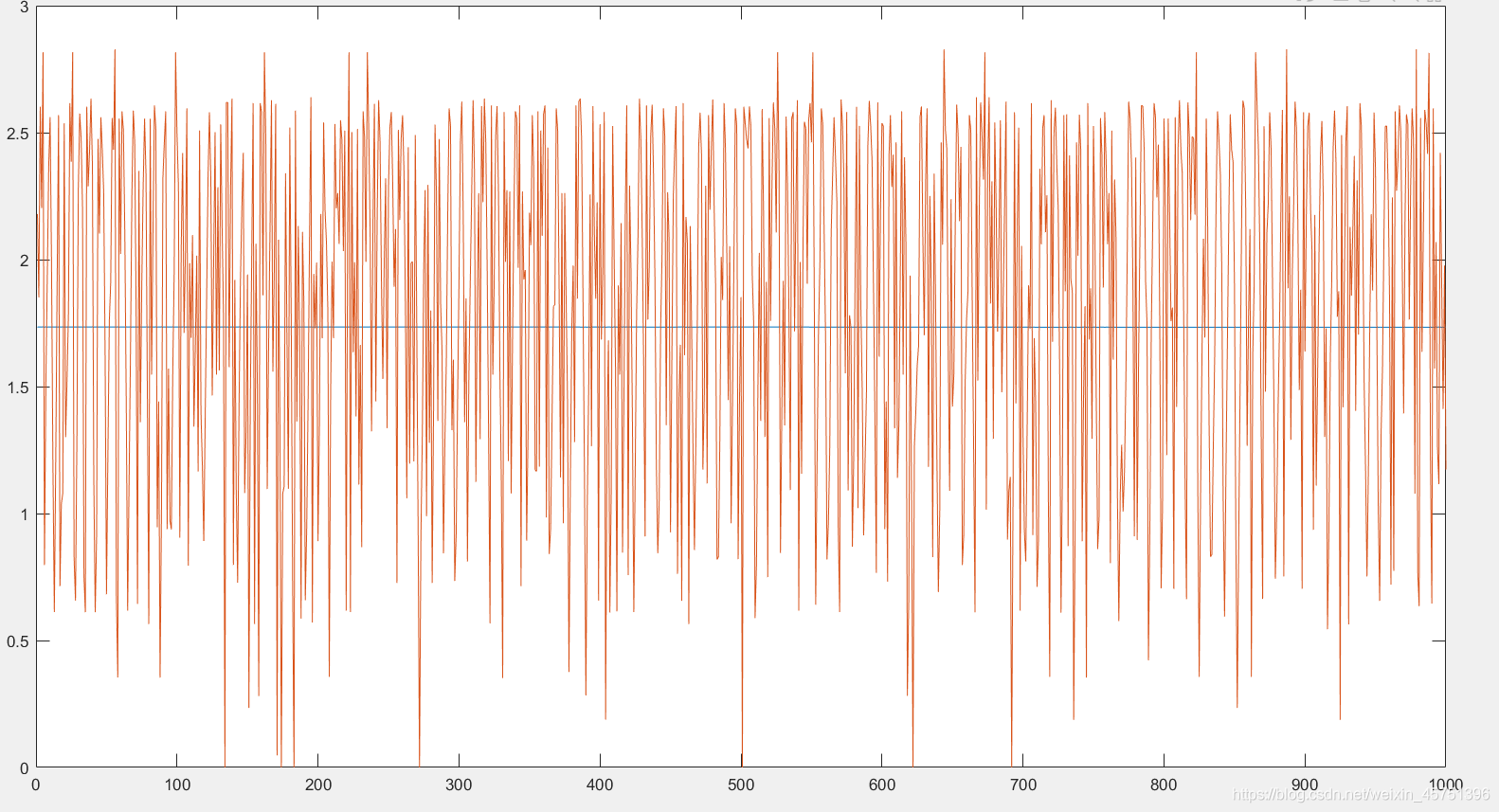
2.4 Kalman在穩定紅外傳感器讀數效果展示
穩定ADC讀取紅外測距模塊的數值
我大致放在據障礙物8cm左右的位置,
//引數配置
void Kalman_Init()
{
kfp.Last_P = 1;
kfp.Now_P = 0;
kfp.out = 0;
kfp.Kg = 0;
kfp.Q = 0;
kfp.R = 0.1;
}
while:
HAL_ADC_Start(&hadc1);
ADC_Value=HAL_ADC_GetValue(&hadc1);
ADC_Value=3*ADC_Value/4095;
ADC_Value=KalmanFilter(&kfp,ADC_Value);
printf("%f\r\n", ADC_Value);
HAL_Delay(10);
程色波動的資料是沒有添加Kalman濾波的效果,淺藍色的資料是添加后的效果,
3.一階卡爾曼濾波代碼調參
在理解公式的基礎上再進行調參是事半功倍的,
3.1 直觀上將數學公式與代碼一一對應
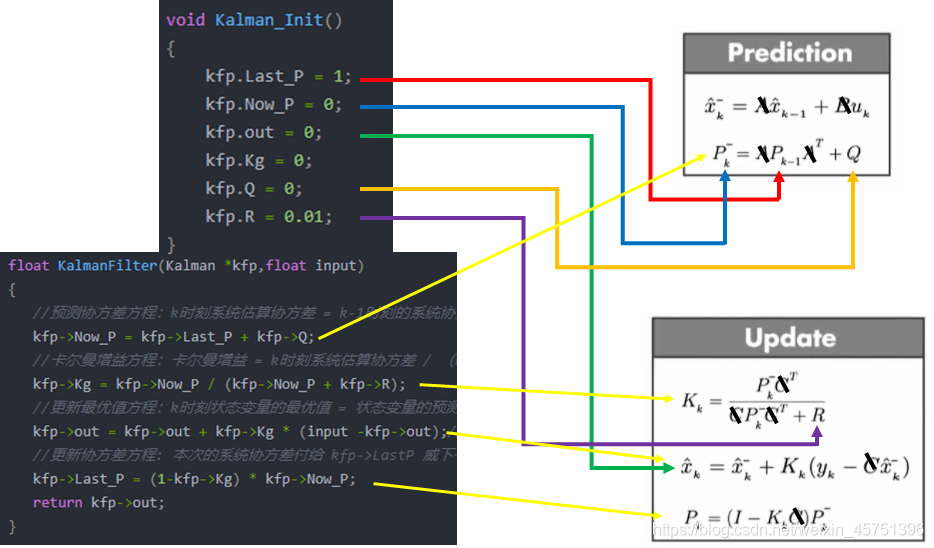
除了輸出不是我們在調參時考慮的引數外,其他五個引數都相互影響,
3.2 紙質版個人理解
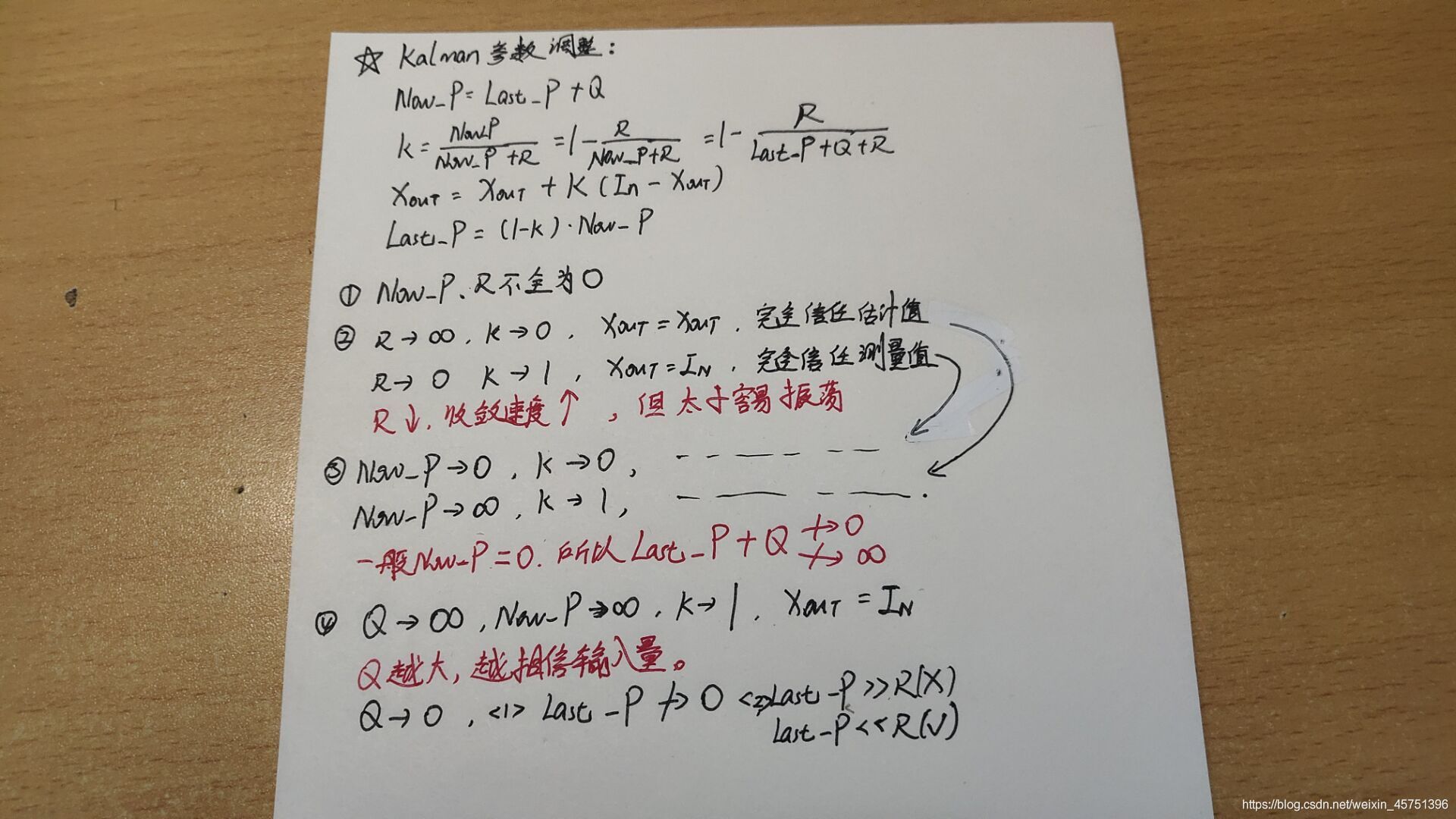
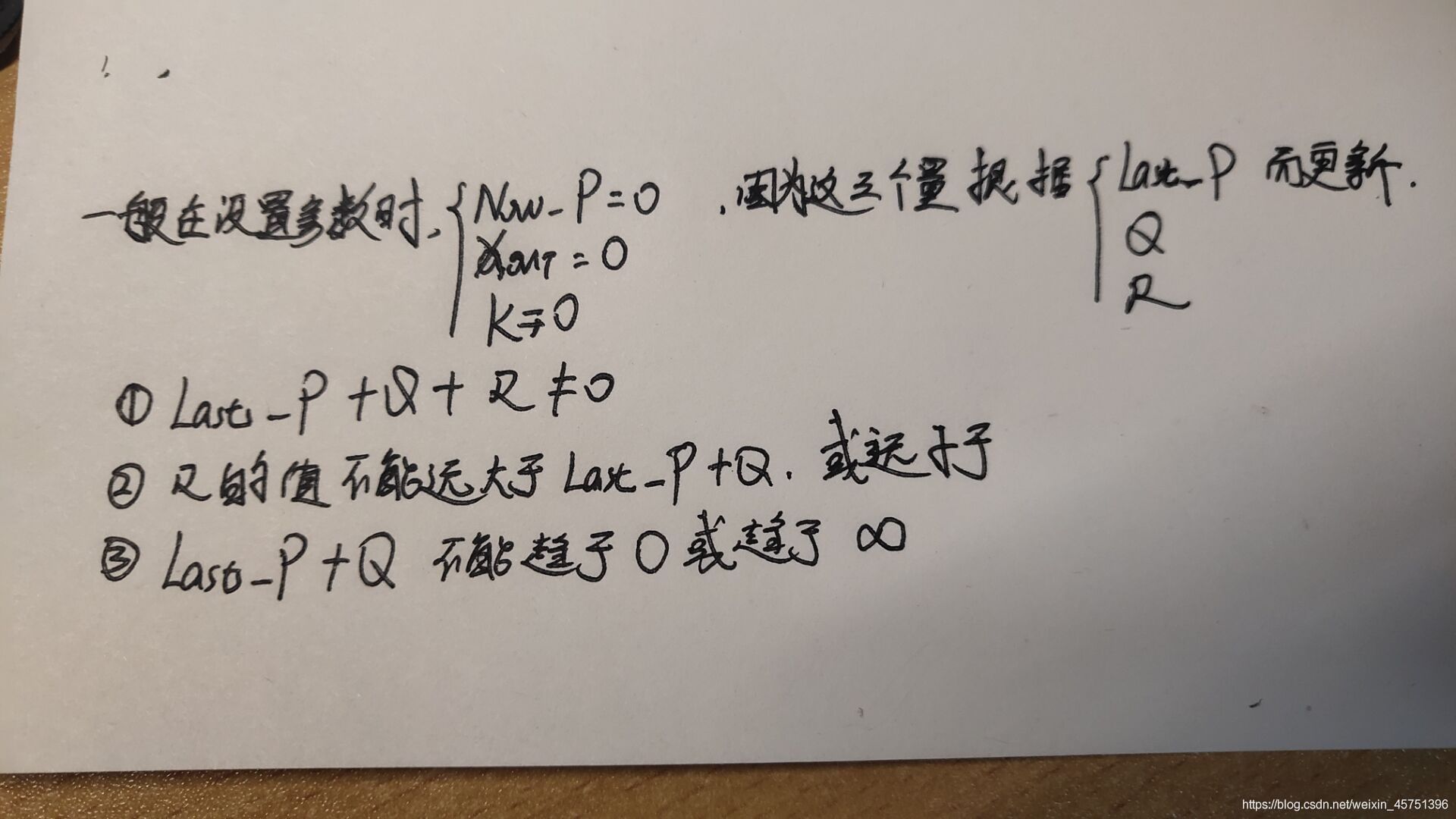
字太丑了嗚嗚嗚…
3.3 參考理解
以下內容摘自:卡爾曼濾波中關鍵引數的調整
Q值為程序噪聲,越小系統越容易收斂,我們對模型預測的值信任度越高;但是太小則容易發散,如果Q為零,那么我們只相信預測值;Q值越大我們對于預測的信任度就越低,而對測量值的信任度就變高;如果Q值無窮大,那么我們只信任測量值;
R值為測量噪聲,太小太大都不一定合適,R太大,卡爾曼濾波回應會變慢,因為它對新測量的值的信任度降低;越小系統收斂越快,但過小則容易出現震蕩;R值的改變主要是影響卡爾曼的收斂速度,
測驗時可以先將Q從小往大調整,將R從大往小調整;先固定一個值去調整另外一個值,看收斂速度與波形輸出,
系統中還有一個關鍵值P,它是誤差協方差初始值,表示我們對當前預測狀態的信任度,它越小說明我們越相信當前預測狀態;它的值決定了初始收斂速度,一般開始設一個較小的值以便于獲取較快的收斂速度,隨著卡爾曼濾波的迭代,P的值會不斷的改變,當系統進入穩態之后P值會收斂成一個最小的估計方差矩陣,這個時候的卡爾曼增益也是最優的,所以這個值只是影響初始收斂速度,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/293659.html
標籤:其他
下一篇:計算機網路原理(基礎)