兩輪自平衡小車一直是近幾年來畢設,課設的熱點,這回帶來一篇比較優秀的設計,有完整代碼的
1.原理圖架構
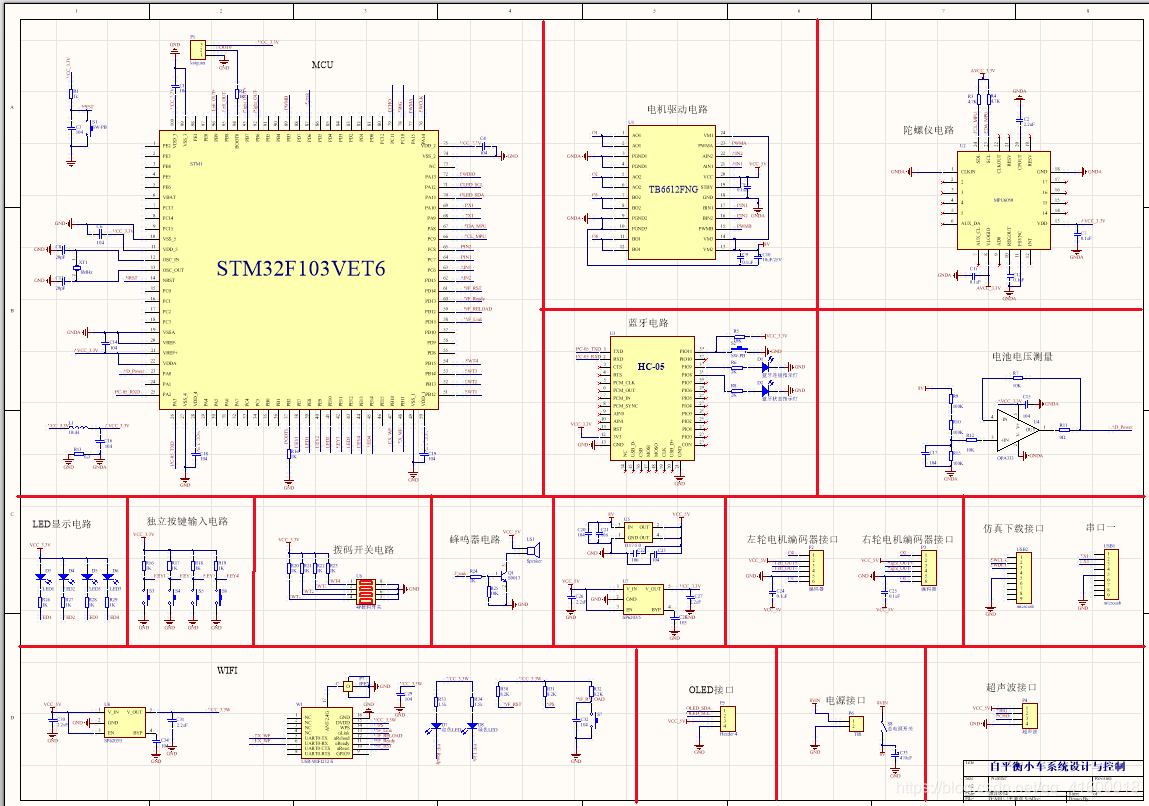
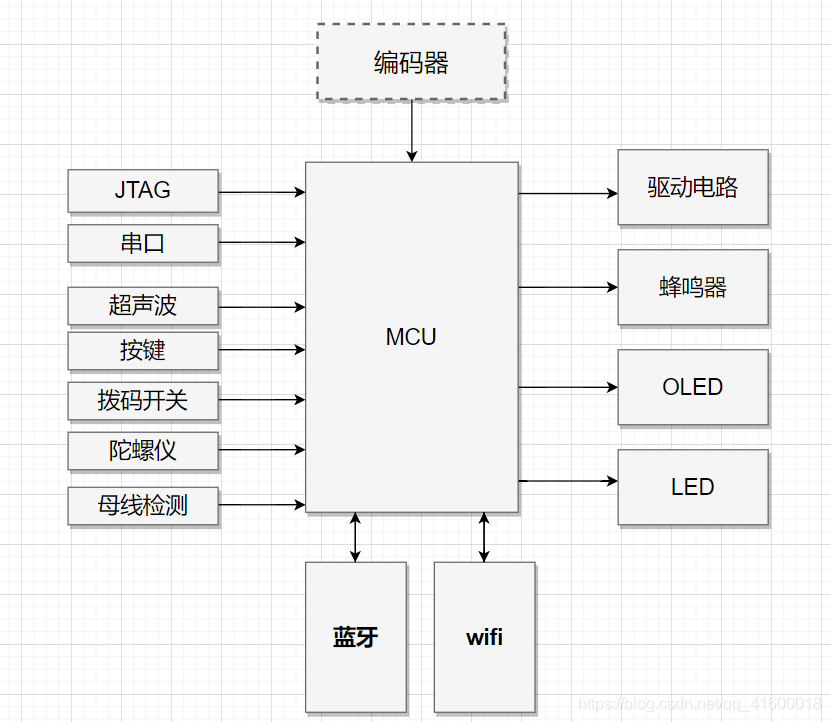
大概整理了一下原理圖的結構,少了電源部分,電源是電池供電,輸入7.2~8V左右,用兩個LDO,變成5V,3.3V,
2.單片機最小系統
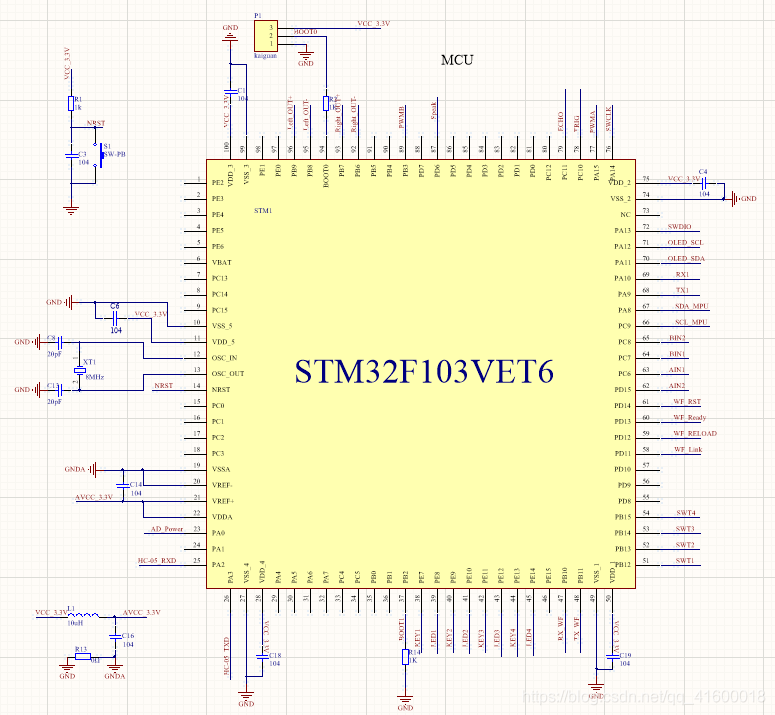
單片機用的是STM32F103系列,從原理圖結構上看得出,外設完全夠用,用的外設我沒有整體總結,后面分模塊介紹具體用到什么外設,
3.電源
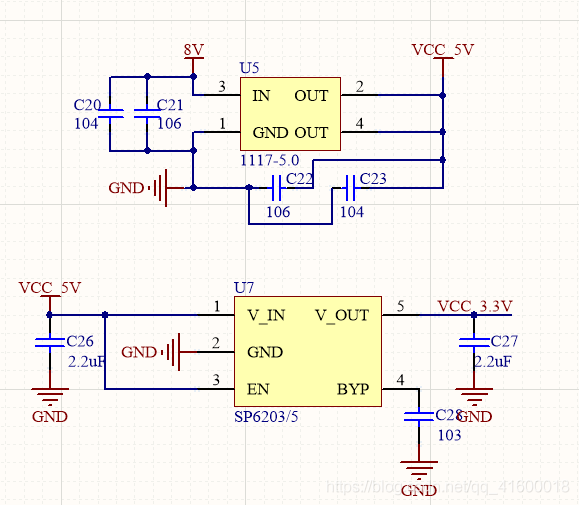
通信芯片和主芯片都是3.3V供電,所以3.3V的帶載能力要強一些,并且3.3V電源給到采集電路,所以3.3V電源的紋波要求要小,大概可以估算一下,峰值電流輸出不能小于500mA,
4.通訊電路
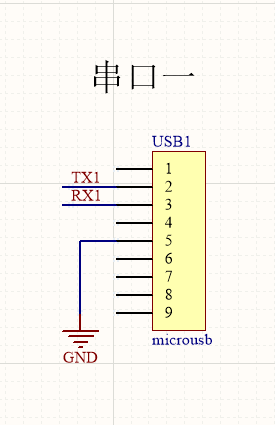
串口:
藍牙:
無線通訊方案有兩種設計,藍牙和WIfi兩種空中介面作無線通訊,
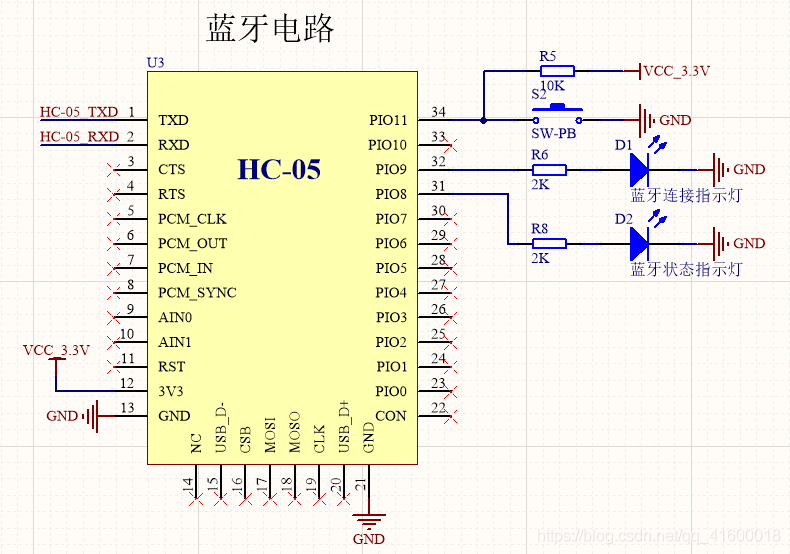
用的是現在市面上成熟并且成本低的藍牙模塊,HC-05.和單片機之間串口通訊,
wifi:
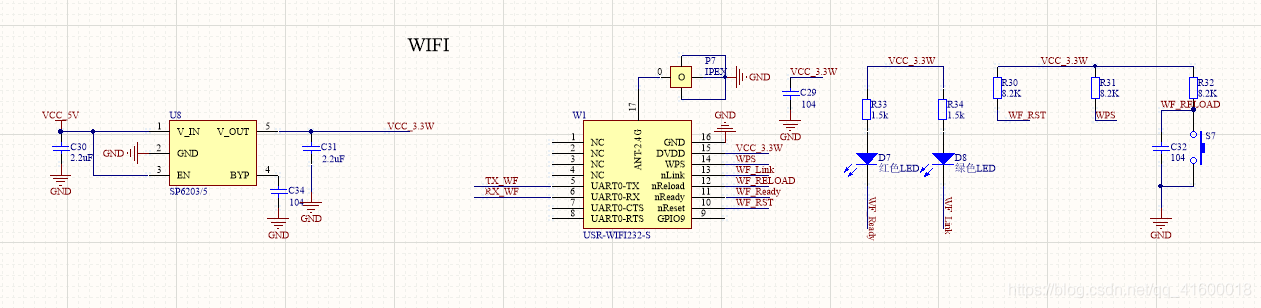
wifi模塊單獨供電,wifi模塊的功耗比較高,和單片機之間也是串口通訊,這樣的話在滿足通訊速度的前提下,軟體開發起來相對簡單,
5.傳感器介面
既然是電機平衡控制,傳感器肯定少不了陀螺儀+編碼器和電機控制電路的母線采集,超聲波避障介面,母線采集的是給電機供電的8V電池電源,
陀螺儀:
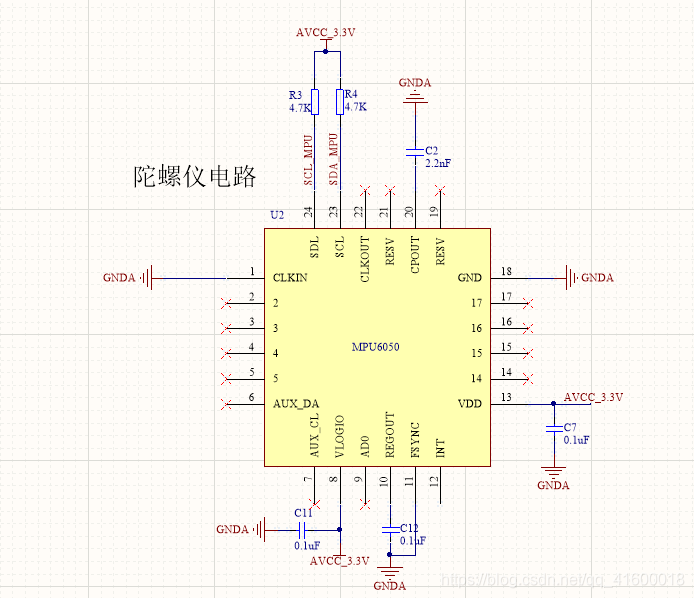
市面上比較成熟的MPU6050,開發成本小,與單片機IIC通訊,
編碼器和電機介面:
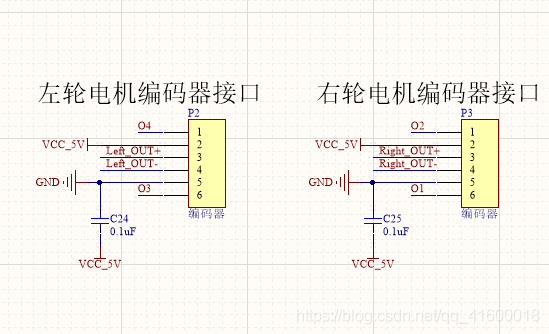
雙電機,需要兩個編碼器,編碼器回傳的是數字信號,
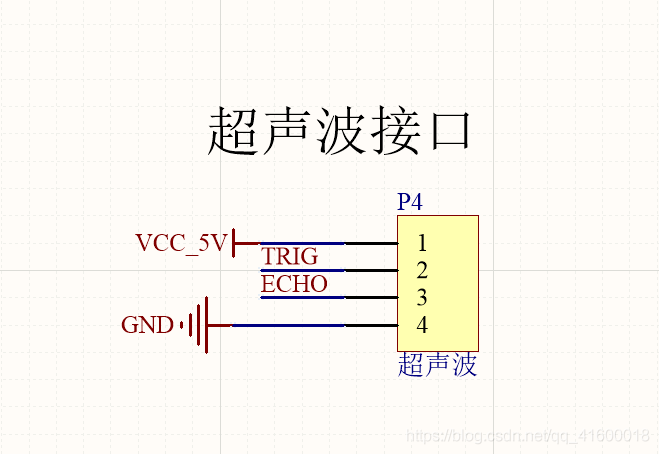
超聲波介面:一個trig觸發信號和ECHO回讀信號
母線采集電路;
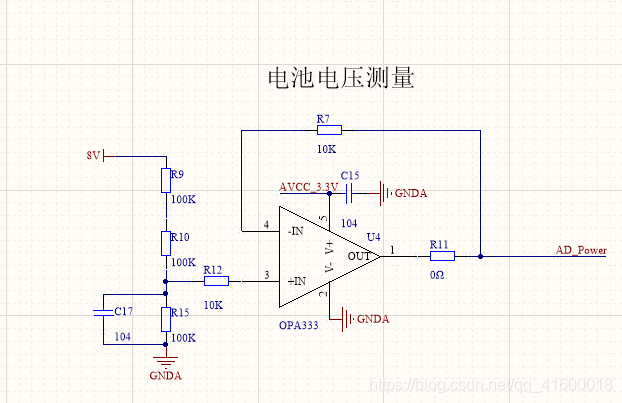
8V經過分壓后的三分之一經過1:1運放輸出到單片機的ADC口,
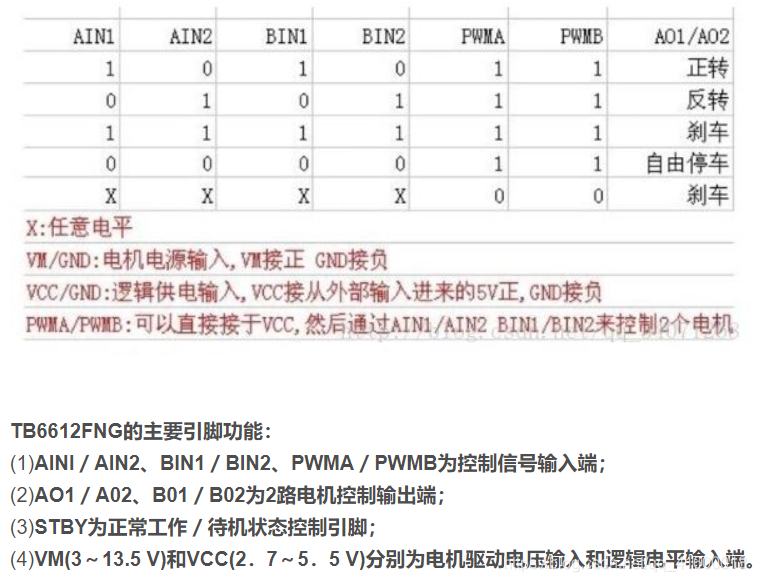
6.驅動電路:
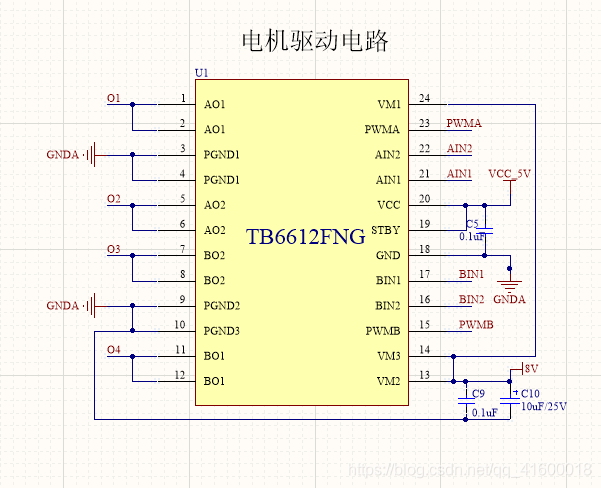
電機驅動電路用集成芯片TB6612FNG PWM驅動兩路電機,
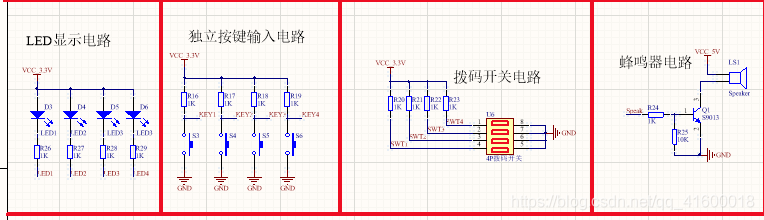
7.其他介面電路
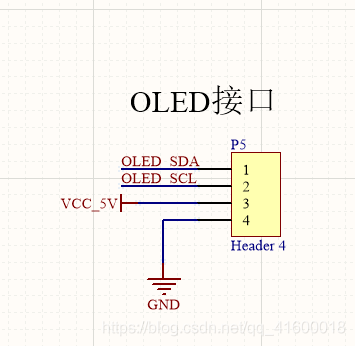
最后是一個小的顯示屏,也是IIC通信,
代碼要的人太多了,就不一一發了,
放在資源里了,沒有設定動態調分https://download.csdn.net/download/qq_41600018/21105730
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/294265.html
標籤:其他