CAN 通信總線協議 簡要概括
- CAN 介紹
- CAN 型別
- 高速 CAN
- 低速 CAN
- CAN 總線系統結構
- CAN-bus通信幀
- CAN 基本資料幀結構
- CAN 硬體設計
CAN 介紹
CAN : Controller Area Network 控制器局域網,是德國Bosch公司為解決現代汽車中眾多控制單元、測驗儀器之間的實時資料交換而開發的一種串行通信協議 是一種能有效支持分布式控制和實時控制的串行通訊網路、
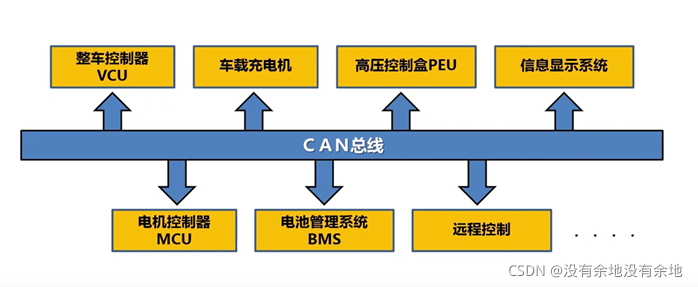
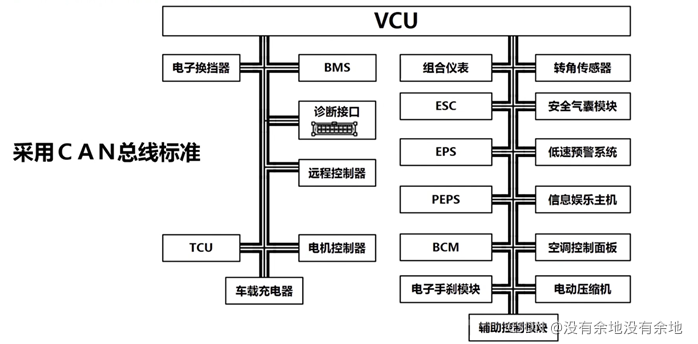
CAN總線協議已經成為汽車計算機系統和嵌入式工業控制局域網的標準總線,
CAN-bus : Controller Area Network-bus,控制器局域網總線技術
1980: 產生CAN協議
1991 : CAN低速成為ISO標準
1993 : CAN高速成為ISO 11898標準
1994 : CAN低速成為ISO 11519標準
CAN 型別
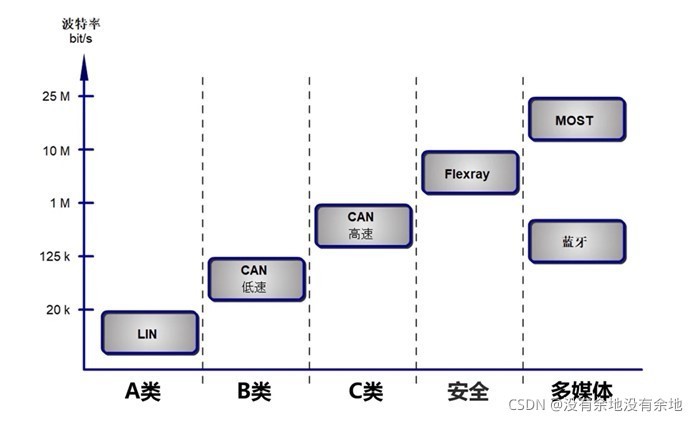

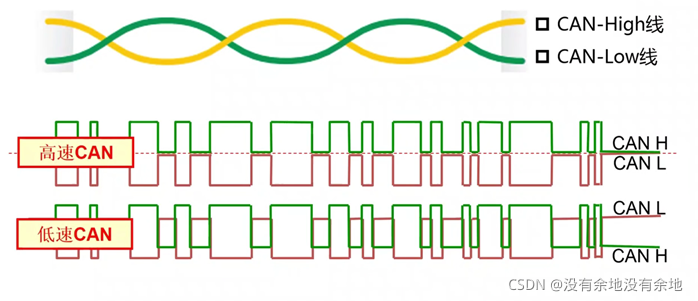
低速CAN有較大的電壓差,比較可靠,高速CAN應該傳輸一般性資料
為了提高資料傳遞的可靠性,CAN資料總線系統的兩條導線(雙絞線)同時進行資料傳送,但波形相反
CAN-High線
CAN-Low線
高速 CAN
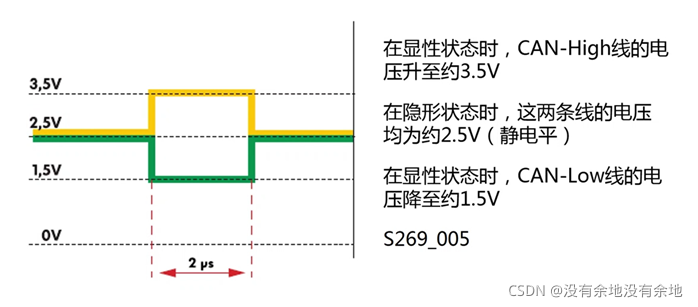
- 在靜止狀態時,這兩條導線上作用有相同預先設定值,該值稱為靜電平
- 對于CAN驅動資料總線來說,這個值大約為2.5V
- 靜電平也稱為隱性狀態,因為連接的所有控制單元均可修改它

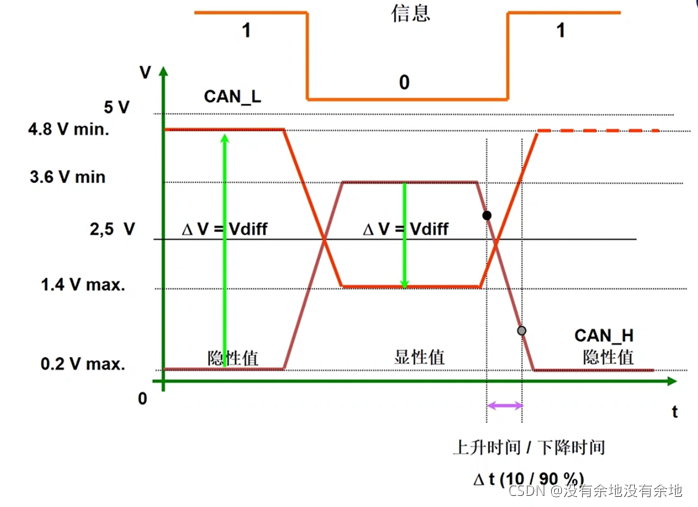
低速 CAN

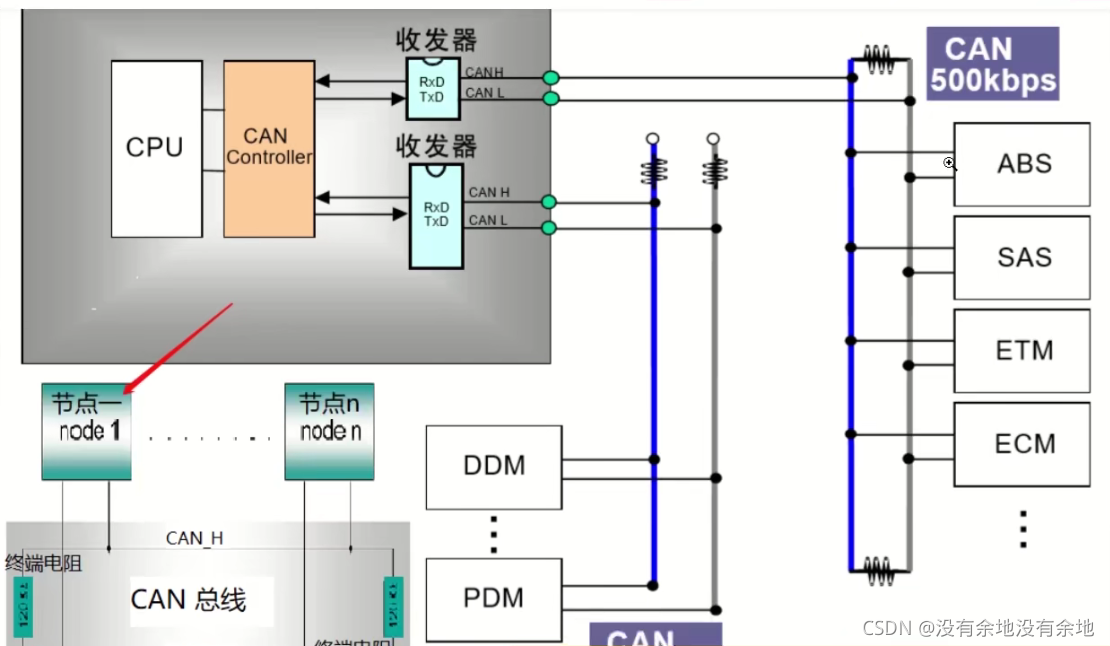
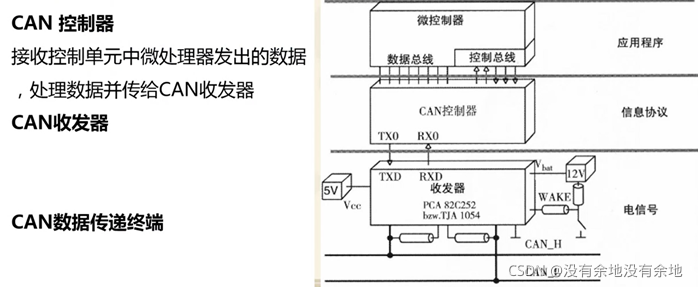
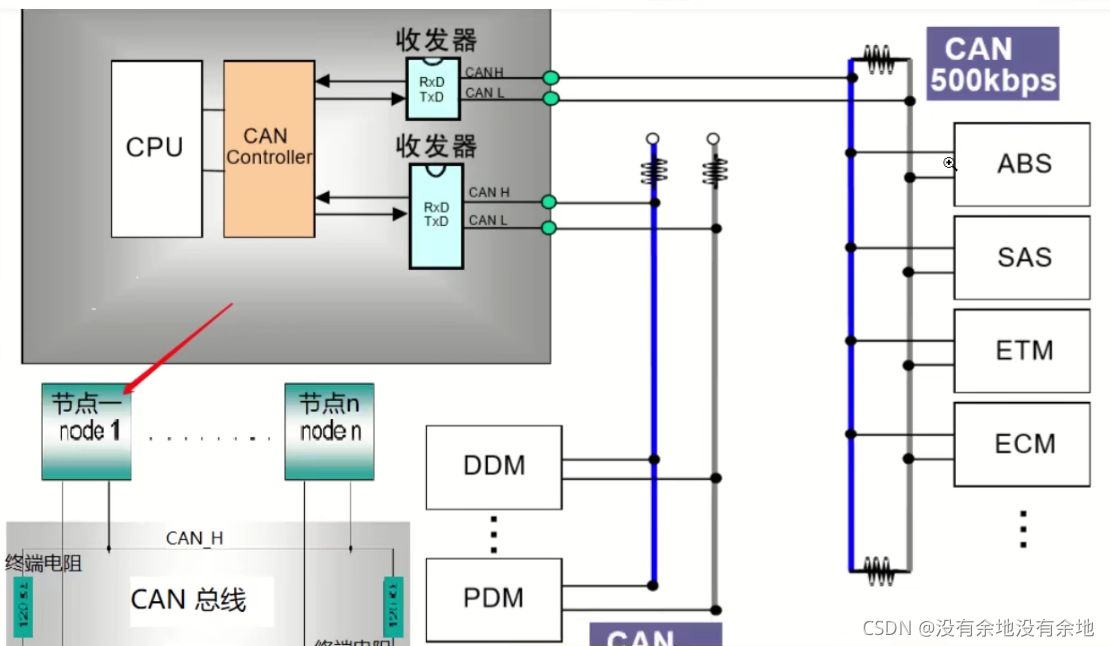
CAN 總線系統結構
-
CAN總線節點上的節點發送資料是以報文的形式廣播給網路中所有節點
我們管每條報文都叫“一幀”資料 -
收發器接收到資料就把資料傳送給控制器,再由控制器檢查判斷是不是所需資料
不是則忽略 -
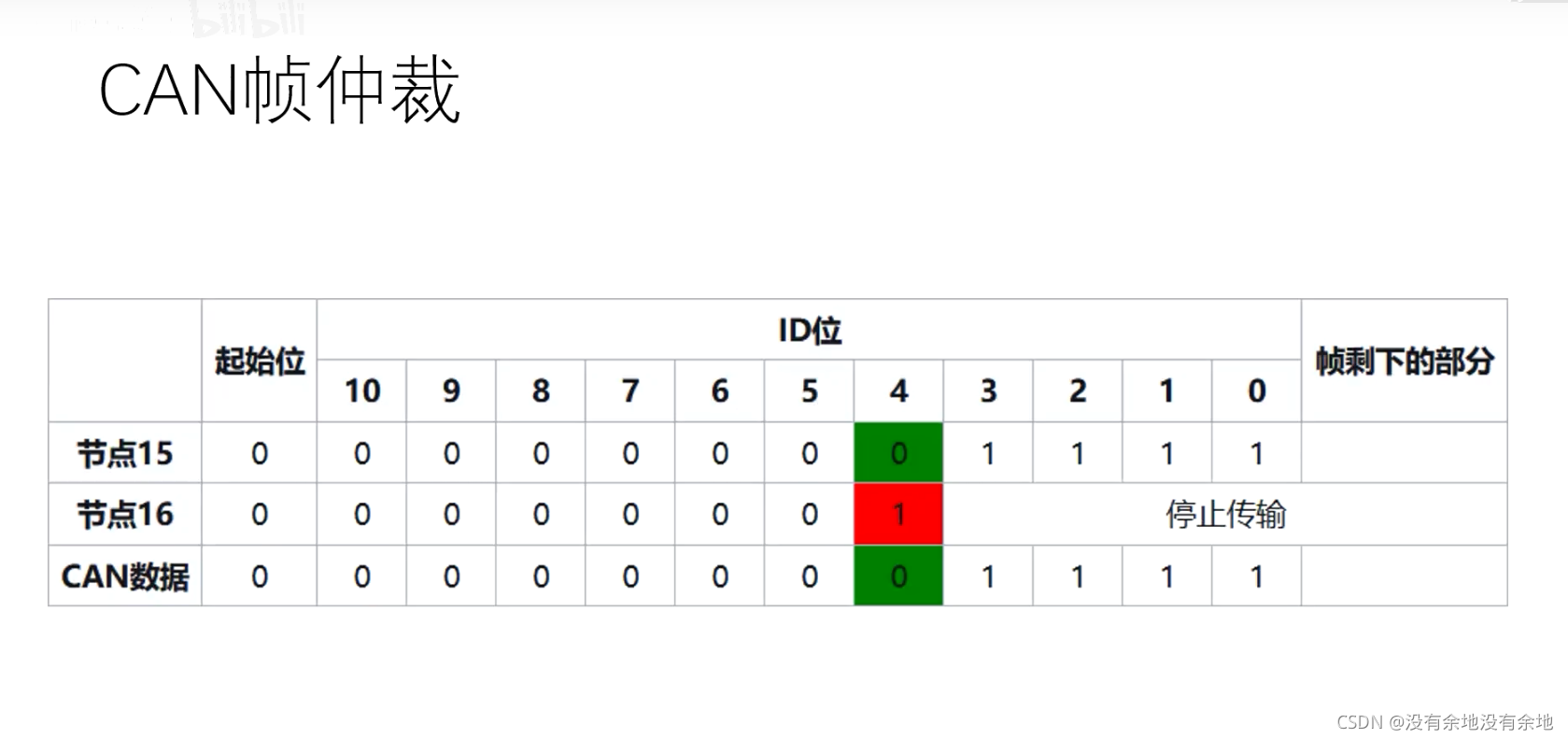
網路上任何一個節點在任何時候都可以發送資料
-
多個節點發送資料,優先級低主動退出發送
-
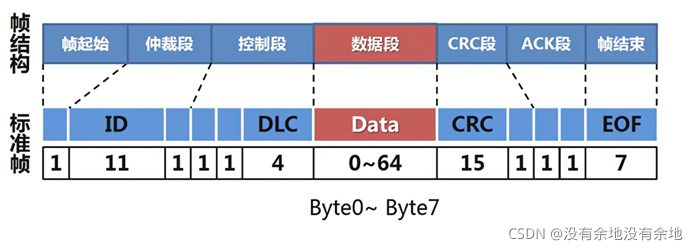
采用短幀結構,每幀資料資訊為0~8位元組(具體用戶定義),對資料編碼而不是地址編碼
-
資料都有CRC校驗和其他檢驗措施,嚴重錯誤的情況下具有自動關閉輸出的功能
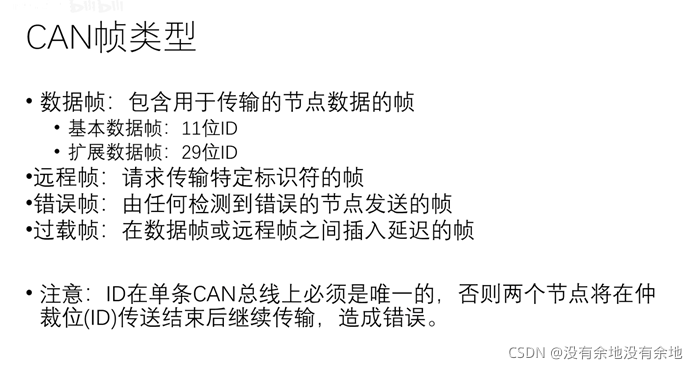
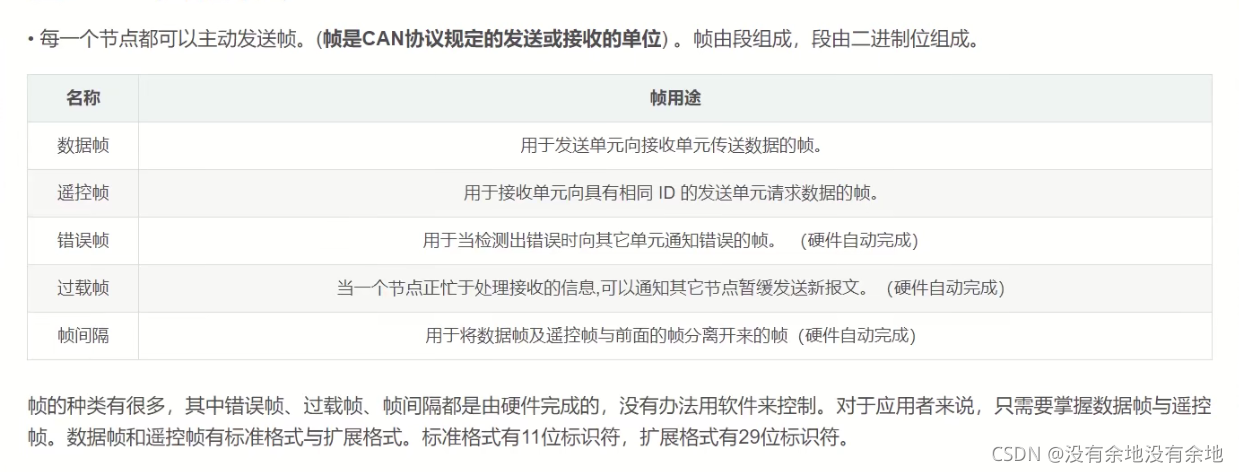
CAN-bus通信幀
CAN-bus通信幀共分為資料幀、遠程幀、錯誤幀、過載幀和幀間隔
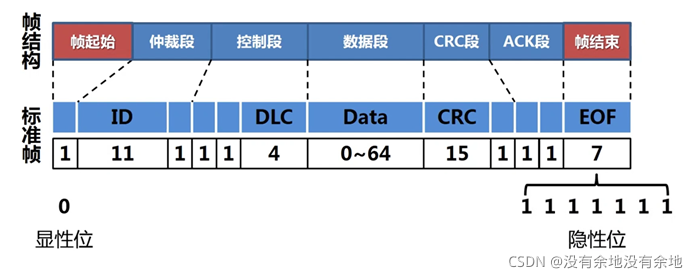
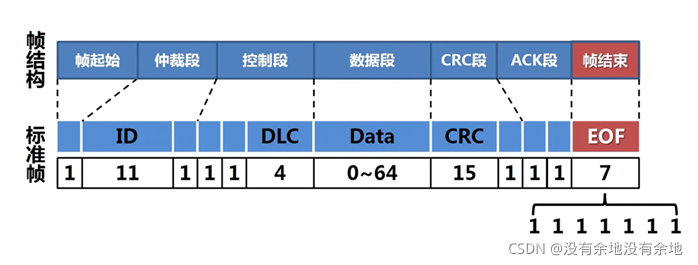
CAN 基本資料幀結構
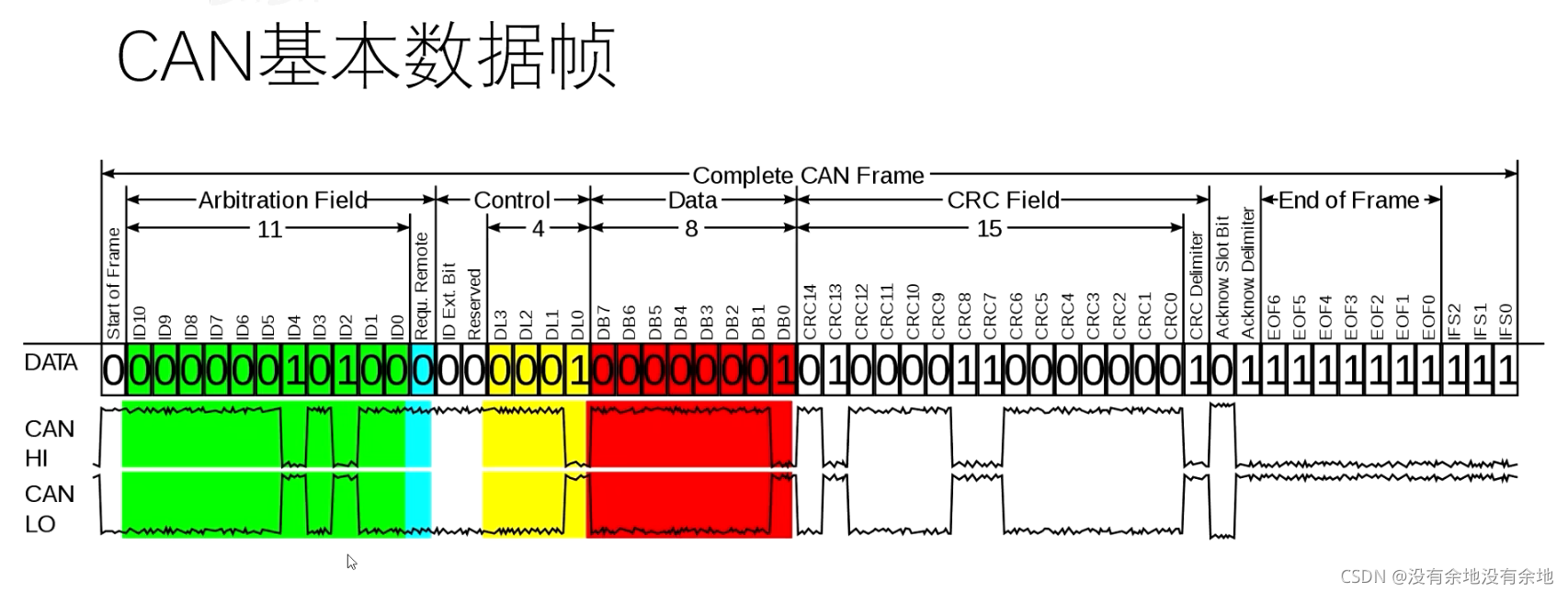
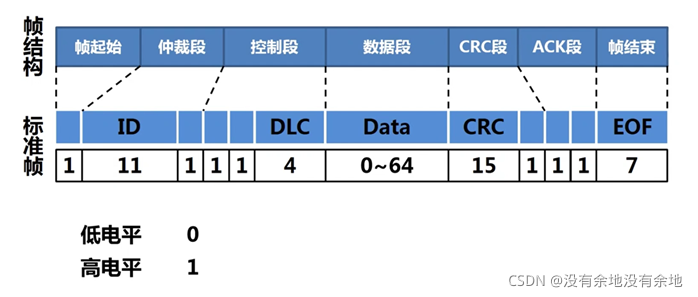
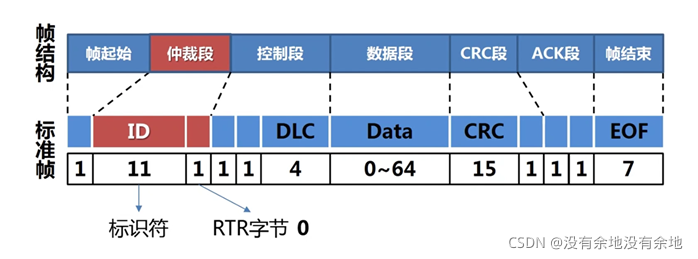
ID :11位ID基本資料幀 29位ID擴展資料幀
RTR位元組 :遠程幀的發送標志位 0表示不是遠程幀
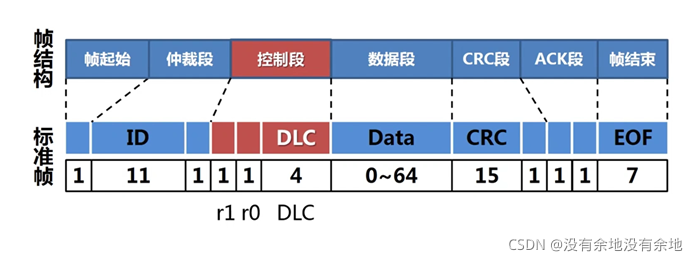
r1 :0為標準幀
r0 :0為標準幀
DLC :資料長度位 八種狀態
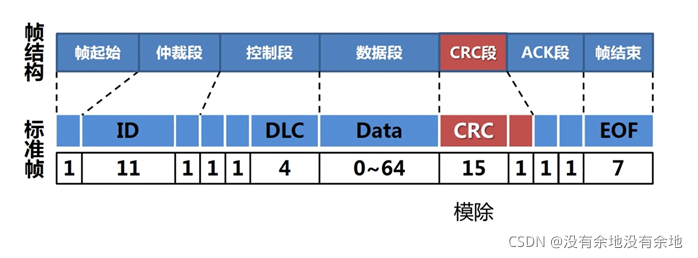
CRC校驗
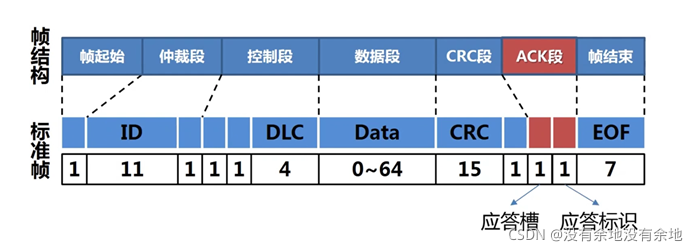
應答槽由發送端發送出來 1,如果在總線上有任何一設備接收到了,它就會把這一位 置 0,發送一方收到資訊,它就知道有設備已經收到,此資料就發送成功了,
CAN 硬體設計
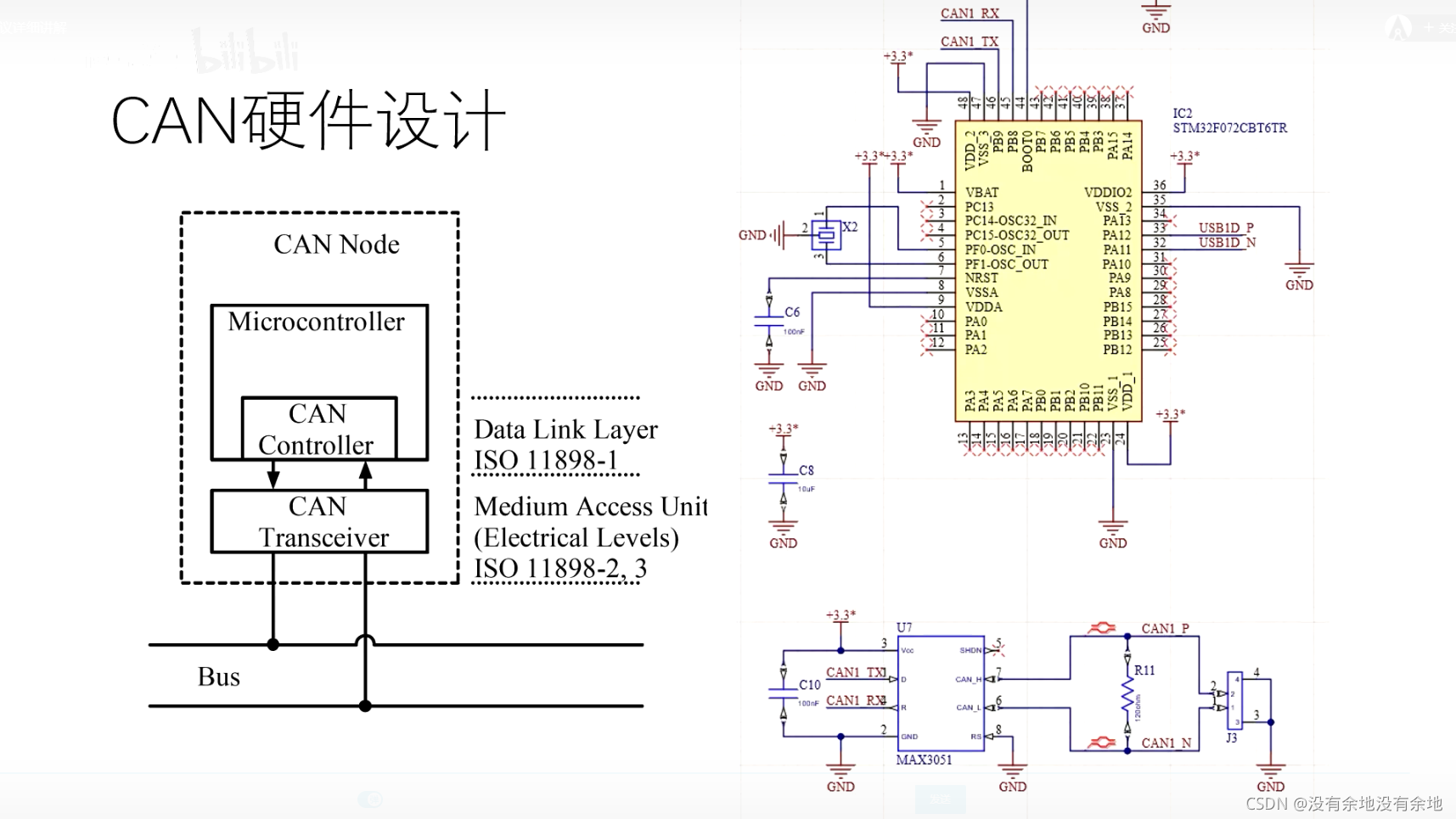
| CAN控制器 | CAN收發器 |
|---|---|
| MCP2512 、 MCP2515 | MAX3051 |
結
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/304885.html
標籤:其他
上一篇:從問題中了解網路層