開源自主導航小車MickX4
- 1 ROS底盤電氣系統
- 1.1 底盤機械組裝
- 1.2 底盤硬體框圖
- 1.3 電氣系統搭建
- 2 差速底盤運動學模型
- 參考資料
在學習ROS的階段我們使用的都是標準的ROS底盤,只需要一個命令就可以啟動小車,然后向 cmd_vel話題上發送資料即可控制小車移動的線速度和角速度,使用標準的ROS底盤可以使我們快速的掌握ROS導航的相關知識,處于加深對ROS自主導航小車的學習,因此設計自制一個ROS小車底盤,學習標準底盤的制作程序,
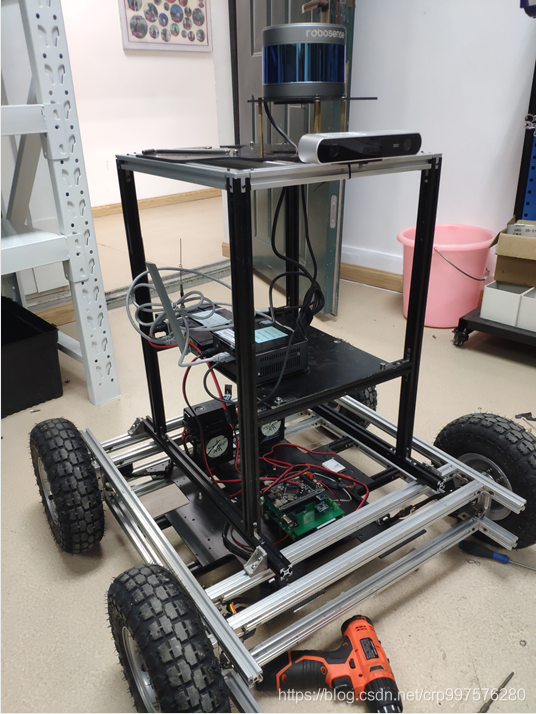
本系列教程意在分享自己學習ROS自主導航小車時候的筆記,教程內容包含了從零開始搭建一個如下所示的四輪小車模型,小車的名字為 MickX4,我們按照小車底盤硬體,然后介紹ROS建圖,導航與控制這個順序介紹小車的搭建程序,教程一共分為6篇:
開源自主導航小車MickX4(一)ROS底盤硬體
開源自主導航小車MickX4(二)ROS底盤運動控制
開源自主導航小車MickX4(三)底盤ROS節點
開源自主導航小車MickX4(四)小車cartographer建圖
開源自主導航小車MickX4(五)小車室外導航
開源自主導航小車MickX4(六)總結與展望
下圖是一個MickX4小車的裝配效果圖:
1 ROS底盤電氣系統
在ROS的自主導航框架中,運動控制系統主要負責小車底盤的精準速度控制并向工控機提供底盤傳感器介面,這一部分被封裝成了ROS的標準介面,小車底盤接收上位機下發的速度指令(v_tar,w_tar), 根據運動學模型解算每一個電機對應的轉速值,控制器根據電機當前狀態實時計算控制量,控制電機達到指定的轉速,實作車輛的精準控制,
通常小車的底盤控制是由單片機進行完成的,主要原因是通常電機介面不統一,部分電機采用CAN總線的方式驅動,但是有一些伺服電機采用的是PWM進行控制,而工控機通常只提供標準的介面(如,USB口、串口、以太網口),單片機擴展IO介面容易,可控制車載其他設備(如,大燈、轉向燈等),另一方面使用的單片機進行控制的優點是單片機實時性強,可以通過單片機的中斷實作實時處理,其次小車底盤的運動控制屬于輕任務量的控制,而工控機適合處理大計算量的任務,如目標識別,構建環境地圖等,此外,在一定程度上也體現了機器人中模塊化的思想,這種結構也可減輕工控機的負擔,
1.1 底盤機械組裝
小車的機械部分我們用電機支座把電機固定在型材上,并使用型材搭建小車的底盤承重的支架,(這種結構很粗糙,車輛載重會影響電機的軸承,因此只適合做的演算法驗證的小車)
Mickx4 小車底盤組裝全程序
這種結構還是比較皮實的,以下是我們在戶外測驗的小視頻,視頻中可以看到M3508電機的功率非常強勁,站個人上去也能走,但是實際測驗程序中發現,四輪轉向還是比較費力的,人站上去可以前后走,但是原地轉向就不行了,
Mickx4 自主導航小車底盤測驗
這一部分我們沒有做過多的研究,只是分享了一個搭建程序,因為我們是從實驗室找的廢舊的材料組裝的,實際中各位可以按照自己的實際情況找一個碳板或者加工一個底盤支架固定電機即可,以下是我們所使用到的設備清單:

有需要硬體清單的同學可以在評論區留下郵箱,看到后發送excel到你的郵箱中,
1.2 底盤硬體框圖
這里我們首先搭建如圖5-2所示的小車硬體框圖,該小車電機共使用4個大疆的M3508 電機,電機通過CAN總線與處理器相連,處理器使用STM32F103單片機作為唯一的處理單元,小車板載的IMU使用IIC總線與處理器相連,超聲波模塊安裝于小車四周,超聲波由超聲波控制器采集打包通過串口協議發送到控制器中,最后處理器通過串口轉以太網模塊對工控機提供以太網介面,通過TCP/IP 與工控機實作資料交換,
這里我們首先搭建如圖5-2所示的小車硬體框圖,使用STM32F1單片機作為底盤的主控制器(簡稱:底盤控制器),以實作遙控器資料采集、IMU資料采集、超聲波和速度的倍訓控制,
底盤控制器接收遙控器或者是工控機發送的目標速度指令(v,w),根據當前電機反饋的狀態資料,通過PID控制器計算控制量,最后通過CAN總線下發到每一個電機上,
- 電機使用的是大疆的M3805電機,該電機峰值功率高達220W,峰值扭矩5Nm;最大持續功率為150W,可以持續輸出3.5N-m的扭矩,M3508電機使用CAN總線通訊,可實時反饋電機電流、速度、位置,
- 遙控器使用的是大疆DT7遙控器,通訊協議為DBUS協議,使用反相器連接遙控器的引腳,將串口的波特率設定為1M以后,可通過串口決議遙控器的資料
- IMU使用MPU6050提供三軸加速度和三軸旋轉角速度、HMC5883提供三軸的磁力,利用四元數互補濾波實作9軸姿態融合演算法,計算輸出3個姿態角(roll,pitch,yaw),用于測量小車姿態,
- 超聲波使用是一個自制的模塊,該模塊同樣使用STM32作為處理器實時讀取16路超聲波傳感器的資料,并將資料打包轉換到CAN總線和串口總線上,上傳到底盤控制器中,

1.3 電氣系統搭建
底盤的電氣系統主要負責為傳感器和工控機供電,對電池充放電進行管理,檢測電池電量、過流保護及控制小車各模塊上電順序,通常小車上使用DC-DC電壓轉換模塊對外提供12V、19V、5V 等直流電源,而小車電機這類大功率設備的供電(高壓供電)應由主控板通過控制固態繼電器或者接觸器實作,此外電氣系統還應具備過載保護的功能,當系統某一路電壓出現過載時,主控板可通過控制繼電器斷開該路電壓保障系統的安全,
實際我們搭建的小車由于使用的功率較小,因此我們沒有使用高低壓順序上電,也沒有使用接觸器控制電機的上電,電池使用的是大疆的電池,該電池自帶有過放電、充電保護和電池電量顯示的功能,對電氣系統進行了簡化,
下圖顯示了我們所使用的DC-DC模塊和電池,


注意: 大家在選取電池的時候一定要選擇帶有過沖和過放保護、質量過硬的電池,否則在使用程序中可能會造成電池鼓包,產生安全隱患,
2 差速底盤運動學模型
在完成小車底盤傳感器的安裝以后,我們首先需要分析小車的運動學模型,找到小車整車速度(v,w)與每一個電機的轉動角速度的關系,
主流的小車底盤按照轉向方式分為差速轉向底盤、全向輪底盤、阿卡曼轉向底盤,其中差速底盤由于其結構簡單通常被研究平臺所采用,而阿卡曼轉向的底盤主要用于自動駕駛領域,
四輪差速底盤如圖5-4所示,四輪差速底盤的轉向中心在小車的幾何中心上,幾何中心到小車四個輪子的距離相等,通常四輪差速模型是按照左右兩側輪子的速度一樣,即當做兩輪模型來控制的,四輪差速模型在車輛轉彎的時候依靠輪胎的打滑實作轉向,
因此可以假設
v
1
=
v
2
v1=v2
v1=v2,
v
3
=
v
4
v3=v4
v3=v4
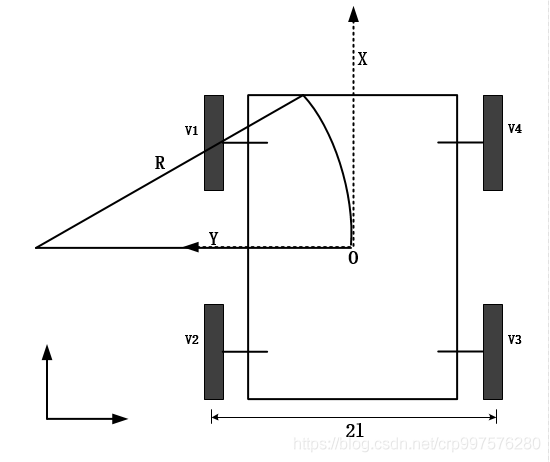
此處我們以圖2中的差速模型進行討論其運動學特性,通常小車采用右手坐標系(右手食指為x方向,大拇指指向Z軸方向,中指指向Y方向),這里假設小車左輪的速度為
v
l
v_l
vl?,右輪的速度為
v
r
v_r
vr?,左右輪間距為
2
l
2l
2l,小車整車的速度為
V
V
V,航向角速度為
w
w
w(角速度定義逆時針方向為正),小車轉彎的半徑為
R
R
R,則小車的轉向半徑R滿足:
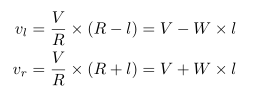
小車左右輪線速度滿足:
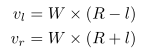
因此有(1)和(2)式可以得到左右輪的線速度為:
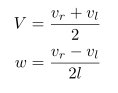
對上式中的兩個方程聯立求解可以得到小車整車的速度
V
V
V及航向角速度
w
w
w滿足以下關系:
上述理論模型主要用于控制小車,當設定了小車整車的速度以后我們需要轉換到每一個輪子的目標轉速,最后對每個輪子分別實作變換控制,其次在推算小車的里程位置時候,我們獲得的資料是小車每一個輪子的轉速或者是轉動的角度,此時我們需要根據上述模型,從每一個輪子的速度逆向計算小車的整體速度與位移量,
在完成小車底盤傳感器的安裝以后,我們在下一部分根據小車的運動學模型,找到小車整車速度
(v,w)與每一個電機的轉動角速度的關系,并為小車設計速度控制器,實作小車的遙控運動,
參考資料
【1】當前小車底盤的代碼位于:https://github.com/RuPingCen/mick-robot-chasiss
歡迎大家點贊在評論區交流討論(cenruping@vip.qq.com) O(∩_∩)O
或者加群交流(1149897304)

轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/34524.html
標籤:其他
上一篇:一線架構師的一些專案管理心得