前一段時間學習了K210的模型訓練,又學會了K210的串口通信,于是冒出一個新奇的想法,用手勢控制小車,手勢識別可能比較難,于是想著先用數字控制小車,(懂得都懂)我相信有很多人再找這篇博客,希望大家可以看到這篇博客并幫助到你們,
文章目錄
- 前言
- 一、模型訓練
- 二、串口通信
- 三、單片機端
- 總結
前言
方法也很簡單,相信你看了這篇文章,想做出來一個數字控制小車很快就可以做出來,接下來我們進入正文.,
一、模型訓練
如果你還不會使用K210訓練自己的模型,可以看我主頁的文章,里面教你了怎么使用K210訓練自己的模型,另一篇博客也教你怎么打標簽
了,你要做的就是采集足夠多的資料集,然后打上標簽,接下來進行訓練就可以了,這里我使用VOTT給大家做個示例
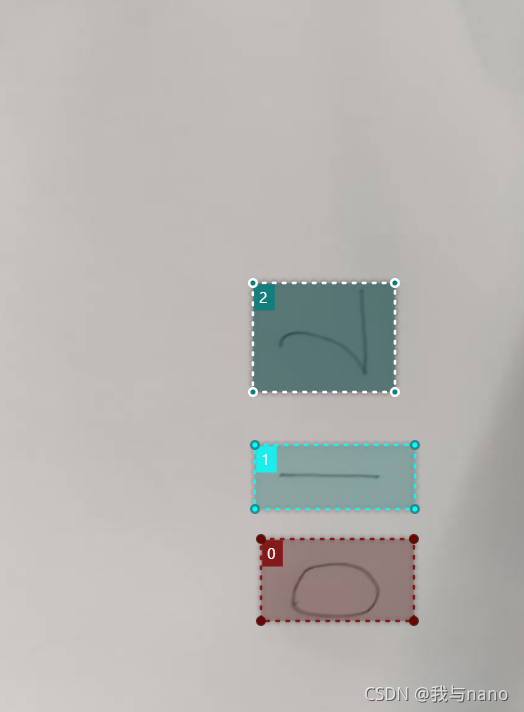
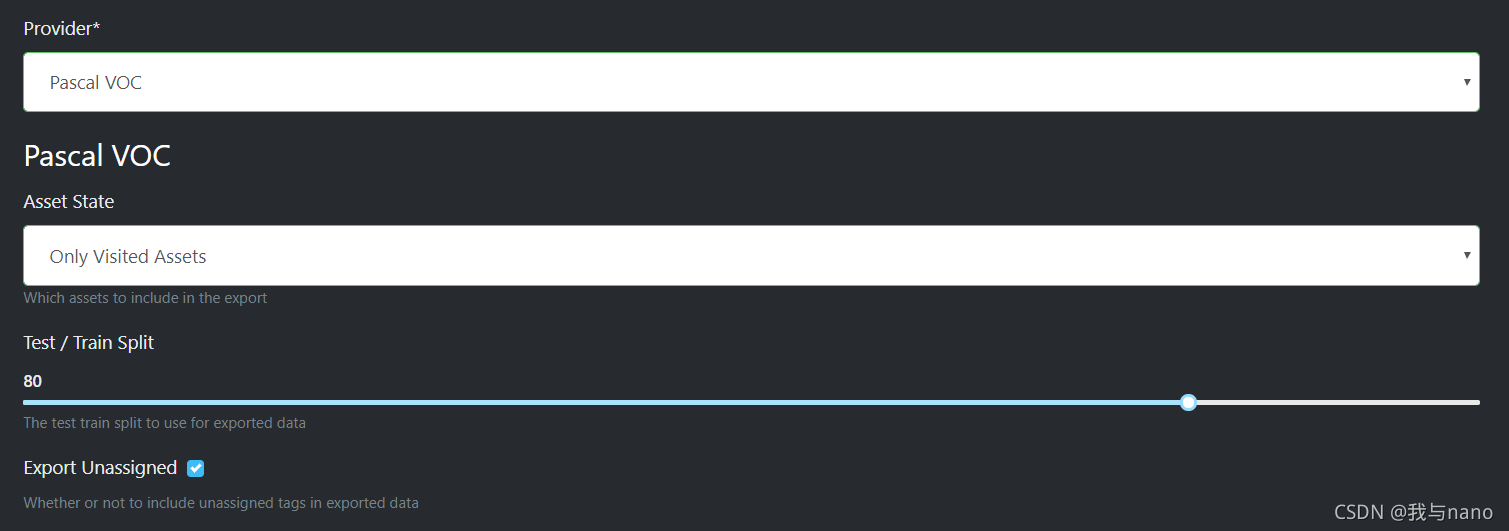
打完標簽之后匯出標簽voc格式
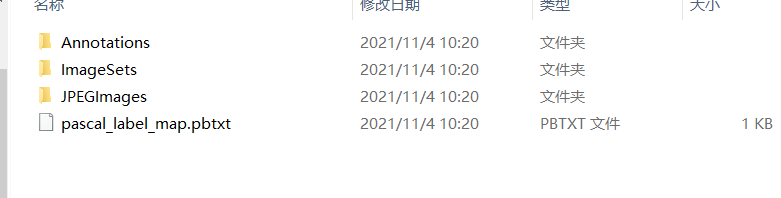
然后你會在檔案夾下看到如下檔案
接下來我們正式進入訓練(選擇正確的檔案夾)
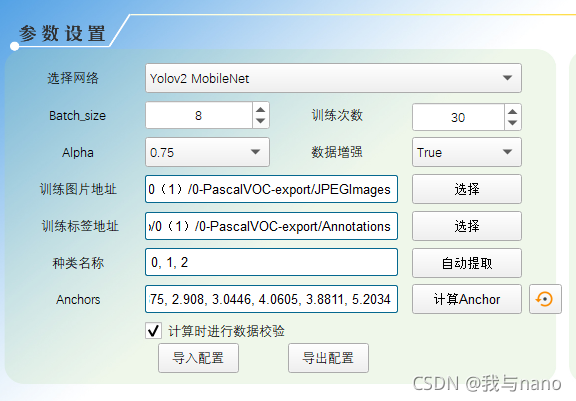
如上圖是在訓練的程序,訓練完之后和上一篇文章執行一樣的步驟即可,
二、串口通信
看我主頁里面關于K210的串口通信文章,里面附上了完整的原始碼,直接使用即可,
三、單片機端
這里我就不過多的贅述了,相信看這篇文章的人也只是僅僅需要一個識別的結果進行串口通信,
總結
到這里呢這篇文章就結束了,完整的模型我正在訓練,我也會講串口通信加進去,發送數值和坐標,加油,希望能夠幫到各位,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/348453.html
標籤:其他
上一篇:程式員必須要懂的計算機核心概念