Dijikstra演算法
演算法解決的問題:求已知頂點V0到其他頂點的最短路徑

圖中任意兩點間路徑可以表示為
Pxy = pxa + pab + pbc +· L + pcy (全部的p>0)
若求<x,y>的最短路徑,就是求 pxa,pab,pbc, pcy的最小值
而若使pab最小,前提是必須確定一個a,a又由pxa確認,
所以,迪杰斯特拉演算法本質上是一個遞推迭代的程序,知道了前一個才能知道后一個
定理一:與目標節點直接相連的多個節點中,權值最小的的節點與目標節點形成的路徑是最短路徑
證明:
先證充分性,即如果權值最小,那么是最短路徑
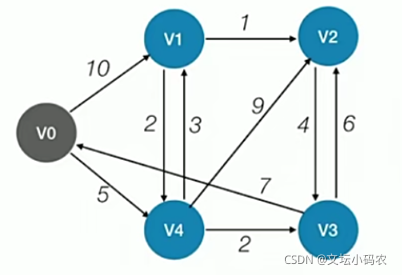
如圖所示,已知與v0直接相連的4個節點中,v1與v0直接相連且相較于其他直接相連的節點中路徑最小,所有v1與v0間的最短距離確認
設P表示最短路徑 P01表示從0到1的路徑可表示為
P01 = P0a + Pab + Pbc +· L + Pc1 (全部的p>0)
對于不同的路徑來說其少的只是 這個式子的中間項
設直接相連的P01 ‘= p01
非直接相連的 P01‘‘ = p0a + pa1;(a為中間節點)
又因為已知p01為所有直接相連節點中的最小值
所以有 p01 < p0a
有因為p>0
所以P01‘ < P01’’恒成立,
證得其充分性
下面來證明其必要性
已知最短路徑,所以有 Po1 = p0a + pa1 最小
設數列Pn = p1 + p2 + p3 + p4 + …pn
Pn – Pn-1 = pn >0 恒成立,所以Pn為增數列
因此PnMin = p1 = p01
所以最小得路徑一定是直接相連的最小值
證得其必要性
演算法的執行思路
從前面的的遞推式子講起

同時也有

代入得
說明y到x的最短路徑 等于 x到c的最短路徑 + c到y的最短路徑
因此,我們需要對每個節點都進行一個標記,來說明它是否已經找到最短路徑
還需要一個陣列來存盤這個節點到我要找的目標節點的路徑長度
當所有節點都確定找到最短路徑后,這個長度陣列就是我所要找的最短路經
Path陣列的引入
前面提到過,任意兩個節點的路徑可以被描述為
而這個中間節點c是不確定的,我們求最短路徑的目的就是為了找到這個c;這個中間節點c同目標節點x,y一樣重要,是標識這個路徑的唯一手段,
因此,我們需要引入一個path陣列,來表明我的這條路徑中間經過的節點數,
這樣就可以說明x-y得最短路徑為 x -> a -> b -> c -> y
所以path陣列的含義是,y節點在找到x節點的最短路徑中,最后一個經過的其他節點
輔助向量的代碼展示
typedef struct Dijkstra
{
bool final[vertex_MAX]; //用于標記某個頂點是否找到最短路徑
int dis[vertex_MAX]; //記錄頂點得路徑長
int path[vertex_MAX]; //記錄最短路徑時的直接前驅下
}Dijkstra;
這三個輔助向量來幫助我們有效執行迪杰斯特拉演算法
演算法執行流程
首先我們要先將我所要求到其他頂點最短路徑的那個頂點錄入final陣列,因為這個頂點到他自己的路徑永遠是0,且已經最小,因此將它自己的final置為true;
隨后,我們要找到所有從這個頂點指向出的弧,以第一次對dis陣列初始化
void Dijkstra_DN(MGraph* G,Dijkstra* D, int pos)
{
D->final[pos] = true;
for (int i = 0; i < G->vexnum; i++)
{
D->dis[i] = MAX;//當他為MAX時標識兩節點無直接路徑
D->path[-1];
}
/*初始化輔助向量*/
for (int w = FirstPoint(G, pos); w > 0; w = NextPoint(G, pos, w))
{
D->dis[w] = G->arcs[pos][w].adj;
D->path[w] = pos;
}
}
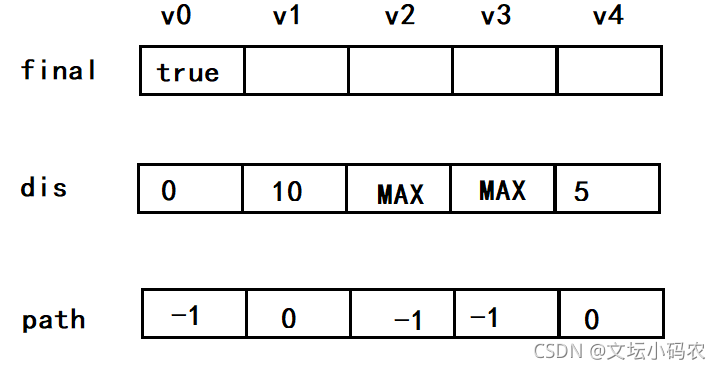
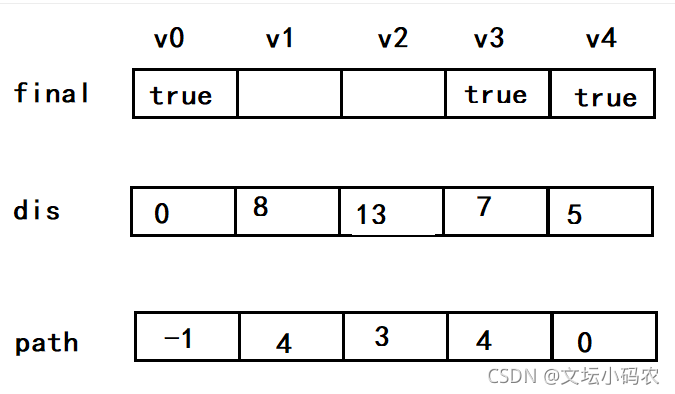
以如下圖為例,我們要求v0指到圖中其他所有節點的最短路徑,在經歷第一步演算法之后
輔助向量集變成以下形式
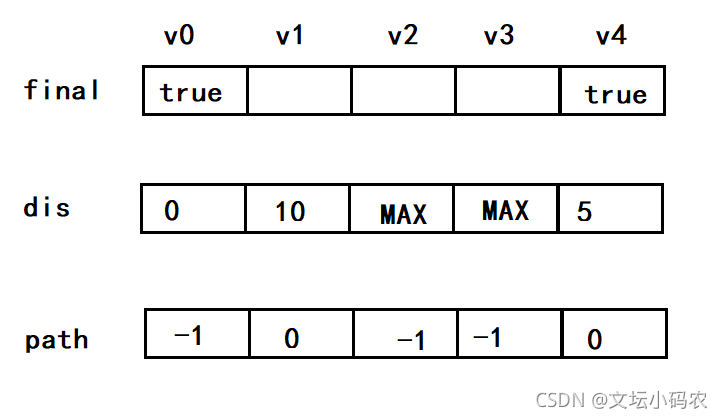
之后根據前面我們推導過的定理一(多個直接相連的節點中權最小的是最短路徑)
我們得出v4指向v0的是最短路徑
此時對v4進行修飾
此時已經確定

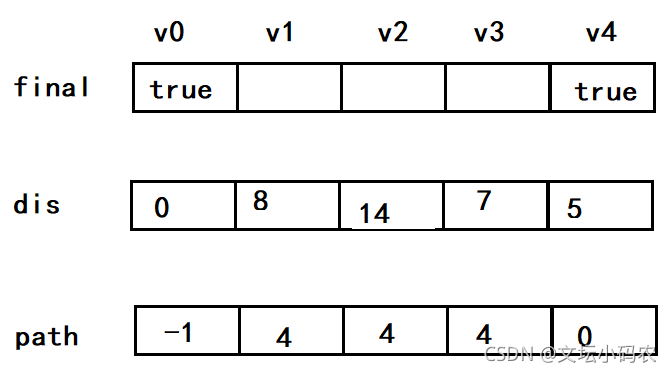
的最小情況,之后我們還要求P01 P02 P03 的最小路徑,所以我們可以以v4作為根節點進行判斷:
如果出現有一個與v4近鄰節點,final為false,且其到v4的距離 + v4到v0的距離小于當前其dis陣列的距離,就說明
P0x < P04 + P4x
因此要修正dis的值
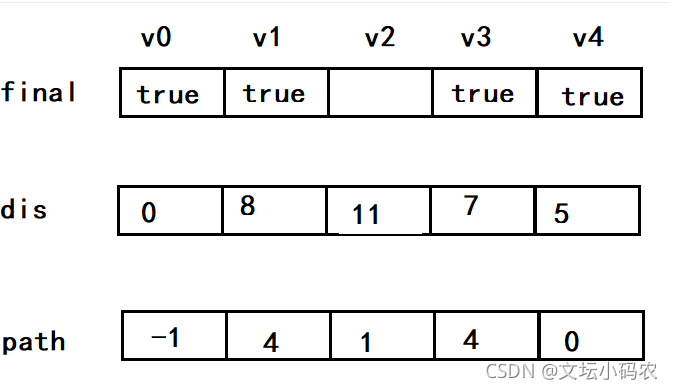
修正后輔助向量集如下圖
這時觀察到v3的dis最小,再確定v3,同時修正輔助向量集
之后觀察到v1最小,修正v1為,同時修正輔助向量集
之后就只剩下v2了,修正v2,同時修飾輔助向量集
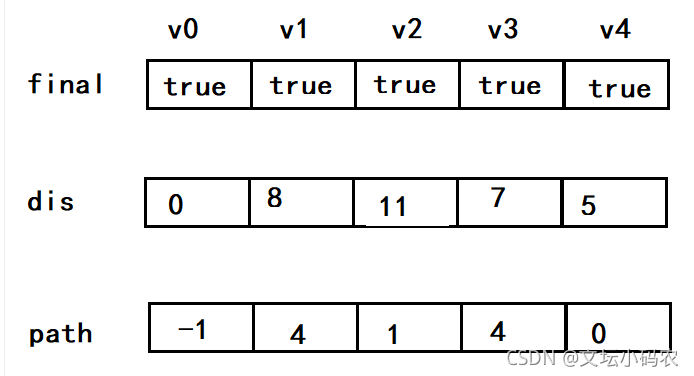
完成手算的演算法流程
手算程序總結
手算的核心在于,判斷哪個節點需要修正,具體的修正程序
代碼實作
我們先來看看之前手算的流程圖
![]](https://img.uj5u.com/2021/11/11/2832631108333716.png)
不難發現,我們總是在重復修正-初始化這個流程,所以我們可以從中抽象出兩個函式
int WhichNeedChange(MGraph* G, Dijkstra* D); //找到需要修正的頂點,并回傳其下標
void Revise(MGraph* G, Dijkstra* D, int w); //以w節點為根修正輔助向量
所以我們的程式可以簡化稱如下形式
void Dijkstra_DN(MGraph* G,Dijkstra* D, int pos)
{
D->final[pos] = true;
for (int i = 0; i < G->vexnum; i++)
{
D->dis[i] = MAX;//當他為MAX時標識兩節點無直接路徑
D->path[-1];
}
/*初始化輔助向量*/
for (int w = FirstPoint(G, pos); w > 0; w = NextPoint(G, pos, w))
{
D->dis[w] = G->arcs[pos][w].adj;
D->path[w] = pos;
}
/*上面是初始化v0即輔助向量*/
for (int i = 0; i < G->vexnum - 1; i++)
{
int w = WhichNeedChange(D);
Revise(G, D, w);
}
}
WhichNeedChange函式的實作
int WhichNeedChange(MGraph* G,Dijkstra* D)//找到需要修正的頂點,并回傳其下標
{
int min = MAX;
int ret = -1;
for (int i = 0; i < G->vexnum; i++)
{
if (D->final[i] == false && D->dis[i] < min)
{
ret = i;
min = D->dis[i];
}
}
D->final[ret] = true;
return ret;
}
這個函式難點在于理解中間的if判斷程序
需要修正的頂點需要滿足:
1,他需要沒有被確定過最短路徑
2,他的距離要是最小值
Revis修正函式的實作
讓我們再來回顧以下修正函式的執行思路
第一步,先找出給定節點的所有指向節點
第二步,看這些新找到節點路徑+給定節點的路徑 是否小于當前節點的路徑
即 判斷是否有 P0x < P04 + P4x
void Revise(MGraph* G, Dijkstra* D, int w)//以w節點為根修正輔助向量
{
for (int v = FirstPoint(G, w); v > 0; v = NextPoint(G, w, v))
{
if (G->arcs[w][v].adj + D->dis[w] < D->dis[v])
{
D->dis[v] = G->arcs[w][v].adj + D->dis[w];
D->path[v] = w;
}
}
}
理解這個函式的難點再與理解if陳述句
這個陳述句的意思是,如果新開辟的路徑加上給定節點到v0的路徑小于原有節點到v0的路徑,就需要添加一個中間節點,以達到求出最短路徑的目的
整體代碼總覽
演算法核心代碼
int FirstPoint(MGraph* G, int v)
{
int ret = -1;
for (int j = 0; j <= G->vexnum; j++)
{
if (G->arcs[v][j].adj != MAX)
{
ret = j;
break;
}
}
return ret;
}
int NextPoint(MGraph* G, int v, int w)
{
int ret = -1;
for (int j = w; j <= G->vexnum; j++)
{
if (G->arcs[v][j].adj != MAX)
{
ret = j;
break;
}
}
return ret;
}
int WhichNeedChange(MGraph* G,Dijkstra* D)//找到需要修正的頂點,并回傳其下標
{
int min = MAX;
int ret = -1;
for (int i = 0; i < G->vexnum; i++)
{
if (D->final[i] == false && D->dis[i] < min)
{
ret = i;
min = D->dis[i];
}
}
D->final[ret] = true;
return ret;
}
void Revise(MGraph* G, Dijkstra* D, int w)//以w節點為根修正輔助向量
{
for (int v = FirstPoint(G, w); v > 0; v = NextPoint(G, w, v))
{
if (G->arcs[w][v].adj + D->dis[w] < D->dis[v])
{
D->dis[v] = G->arcs[w][v].adj + D->dis[w];
D->path[v] = w;
}
}
}
void Dijkstra_DN(MGraph* G,Dijkstra* D, int pos)
{
D->final[pos] = true;
for (int i = 0; i < G->vexnum; i++)
{
D->dis[i] = MAX;//當他為MAX時標識兩節點無直接路徑
D->path[-1];
}
/*初始化輔助向量*/
for (int w = FirstPoint(G, pos); w > 0; w = NextPoint(G, pos, w))
{
D->dis[w] = G->arcs[pos][w].adj;
D->path[w] = pos;
}
for (int i = 0; i < G->vexnum - 1; i++)
{
int w = WhichNeedChange(G,D);
Revise(G, D, w);
}
}
臨接矩陣存盤結構以及初始化代碼
#include <stdio.h>
#define vertex_MAX 20
#define MAXSIZE 10
#define VRType int
#define VertexType char
#define MAX 99999
typedef struct Dijkstra
{
bool final[vertex_MAX]; //用于標記某個頂點是否找到最短路徑
int dis[vertex_MAX]; //記錄頂點得路徑長
int path[vertex_MAX]; //記錄最短路徑時的直接前驅下
}Dijkstra;
typedef enum {
DG, //有向圖
DN, //有向網
UDG, //無向圖
UDN, //無向網
}GraphKind; //圖的型別
typedef struct ArcCell
{
VRType adj; //矩陣元素的值,如果是網則是具體的值;如果是圖則只有1,0兩種
}ArcCell;
typedef struct MGraph
{
GraphKind kind; //圖的型別
int vexnum; //定點數
int arcnum; //邊數
VertexType vexs[MAXSIZE];
ArcCell arcs[MAXSIZE][MAXSIZE];
}MGraph;
void creatGraph_DN(MGraph* G)
{
G->kind = DN;
printf("請輸入網的頂點數\n");
scanf("%d", &(G->vexnum));
printf("請輸入網的邊數\n");
scanf("%d", &(G->arcnum));
for (int i = 0; i < G->vexnum; i++)
{
scanf("%c", G->vexs[i]);
}
getchar();
/*頂點錄入完畢*/
for(int i = 0;i<G->vexnum;i++)
for (int j = 0; j < G->vexnum; j++)
{
G->arcs[i][j].adj = MAX;
}
/*臨接矩陣初始化完畢*/
for (int k = 0; k < G->arcnum; k++)
{
int i, j, w;
printf("請輸入弧<i,j>及其權w\n");
scanf("%d %d %d", &i, &j, &k);
G->arcs[i][j].adj = w;
}
/*各邊及其權值錄入完畢*/
}
文末總結
迪杰斯特拉演算法的實質就是不斷重復《找待修正節點》 —《修正輔助向量》這一程序
只要把握了這個特點,理解迪杰斯特拉演算法就不難了
在研究生考試的初試中,我們只需要掌握迪杰斯特拉演算法的手算即可!!
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/355369.html
標籤:其他
上一篇:基于模版引擎實作-淘寶搜索案例
下一篇:輕輕松松讓你掌握DOM的事件操作