系列文章目錄
提示:這里可以添加系列文章的所有文章的目錄,目錄需要自己手動添加
TODO:寫完再整理
文章目錄
- 系列文章目錄
- 前言
- (1)從Autoware的系統層進行剖析
- (2)從系統組件框圖進行剖析
- (3)從演算法的基本控制和資料流進行剖析
- (4)從Autoware的節點圖進行剖析【較有用】
- 總結
- 部署經驗總結
- 參考資料
前言
認知有限,望大家多多包涵,有什么問題也希望能夠與大家多交流,共同成長!本文先對XXX做個簡單的介紹,具體內容后續再更,其他模塊可以參考去我其他文章
提示:以下是本篇文章正文內容
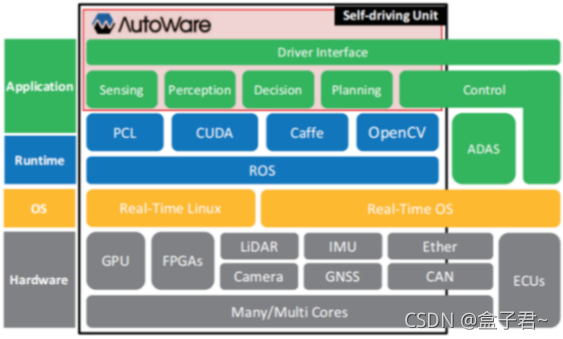
(1)從Autoware的系統層進行剖析
(2)從系統組件框圖進行剖析
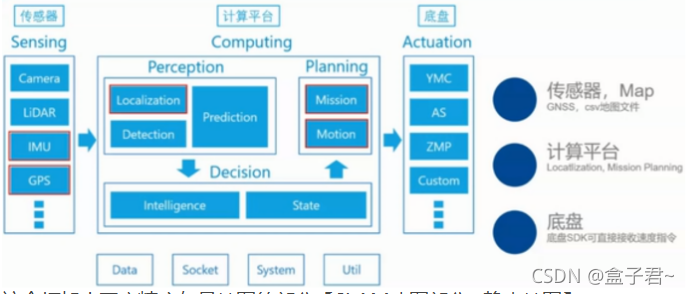
這個框架少了高精度矢量地圖的部分【SLAM建圖部分–靜態地圖及矢量化,其他地圖圖層生成】
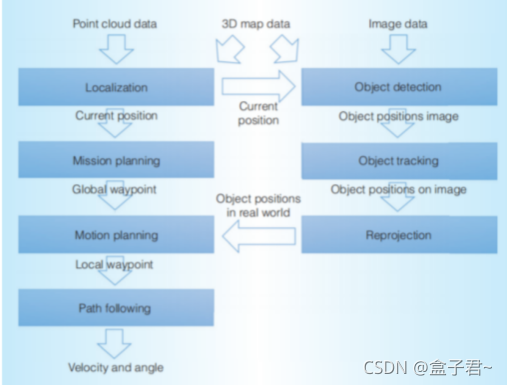
(3)從演算法的基本控制和資料流進行剖析
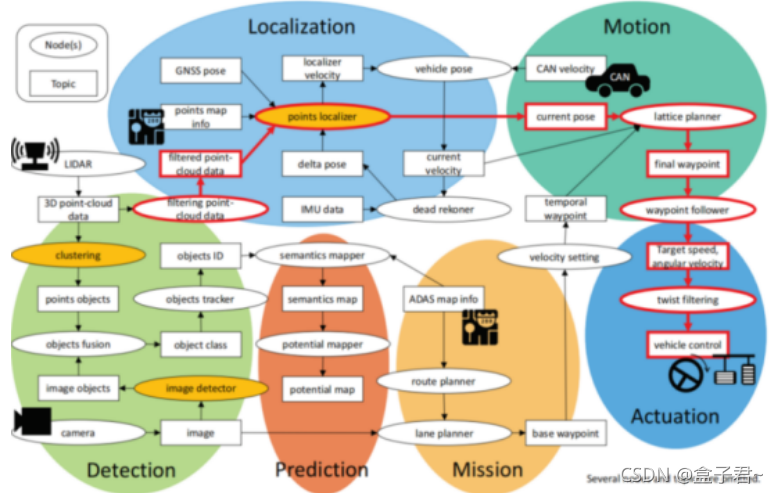
(4)從Autoware的節點圖進行剖析【較有用】
總結
Autoware僅僅是一個工具,實作的原始碼內容還是得靠自己的去學,學習原始碼原理參考百度,Autoware的整體是比較復雜的,整體解讀清楚它的原理短時間是不可能實作的,所以別整體的原始碼去看,從自己需要的模塊逐個突破
部署經驗總結
(1)autoware的bag資料包得改成自己得做驗證,有實物傳感器更好啦,沒有的化自己搭gazebo仿真一樣能拿到傳感器資料
(2)autoware在ubuntu18.04也可以裝1.12以上的版本【防盜標記–盒子君hzj】
(3)安裝autoware從簡單裝起來,用到什么裝什么
(4)裝好autoware啟動界面肯定虧出現花屏的現象,按照博客來pip裝wx,再改檔案就行
https://www.cxybb.com/article/m0_46673077/115400045
https://codeleading.com/article/10816031861/
(5)使用bag_demo運行起來的時候僅僅只有一個CPU在運行是正常的,后面用自己的bag資料包自己選擇演算法的時候CPU運行就可選了
.
.
.
參考資料
(1)官方視頻介紹(ROSCon 2017 )
https://www.youtube.com/watch?v=XlXHLoIDohc
(2)官網提供的 PPT 簡介,檔案說明
https://github.com/CPFL/Autoware-Manuals
(3)autoware 的 gitlab 鏈接
https://gitlab.com/autowarefoundation/autoware.ai/autoware
(4)官方資料包rosbag下載(付費)
https://data.tier4.jp
像我一樣沒錢的可以考慮自己搭個gazebo的仿真環境就好,畢竟學生太…
(5)公司官網
https://tier4.jp/
(6)autoware 操作教程(很全)
https://www.ncnynl.com/archives/201910/3401.html
(7)優酷上演示 autoware 各種 demo 的配置視頻
https://i.youku.com/i/UNDIxMDQ1MTkzNg==?spm=a2h0j.11185381.module_basic_dayu_sub.DLDDH2~A
(8)優酷 autoware 的中文介紹
https://v.youku.com/v_show/id_XMzExNDQ0NzE2NA==.html?spm=a2hzp.8253869.0.0
(9)創客智造的教程
https://www.ncnynl.com/archives/201910/3401.html
(10)PIX教程
https://www.cnblogs.com/hgl0417/p/11844135.html
https://www.cnblogs.com/hgl0417/p/14617025.html
(11)autoware的gazebo仿真博客教程【知道效果可以學習原始碼原理】
假設你已經安裝好了Autoware,Autoware原始碼中其實已經配置有Gazebo仿真環境,當然你也可以根據自己的需要另外下載自動駕駛汽車的仿真模型,該汽車模型已經默認配置好了Velodyne HDL-32E 激光雷達、IMU和相機
在Gazebo仿真環境配置自動駕駛汽車:https://blog.csdn.net/Travis_X/article/details/105418119
給仿真環境中的自動駕駛汽車更換或添加傳感器:https://blog.csdn.net/Travis_X/article/details/105418550
使用NDT構建點云地圖:https://blog.csdn.net/Travis_X/article/details/105455195
使用Hybrid a*進行路徑規劃:https://blog.csdn.net/Travis_X/article/details/105949471
使用聚類演算法作物體檢測:https://blog.csdn.net/Travis_X/article/details/106113427
使用Pure Pursuit和MPC進行路徑追蹤:https://blog.csdn.net/Travis_X/article/details/106116998
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/379444.html
標籤:其他