漫長的幾場考試終于結束,也是開始繼續之前因考試擱置的專案,
這是2022年第一篇博客,也希望自己更加精益求精、不輕視小問題、腳踏實地、無論事情簡單與否都不浮躁地干完,
采用定時器主從模式來達到pwm脈沖的精確輸出,主定時器用來控制從定時器的pwm脈沖輸出數量,從定時器用來產生pwm脈沖,
| 從定時器 | ITR0 | ITR1 | ITR2 | ITR3 |
| TIM2 | TIM1 | TIM8 | TIM3 | TIM4 |
| TIM3 | TIM1 | TIM2 | TIM5 | TIM4 |
| TIM4 | TIM1 | TIM2 | TIM3 | TIM8 |
| TIM5 | TIM2 | TIM3 | TIM4 | TIM8 |
| CH1 | CH2 | CH3 | CH4 | |
| TIM2 | PA0/PA5/PA15 | PA1/PB3 | PA2/PB10 | PA3/PB11 |
| TIM3 | PA6/PB4/PC6 | PA7/PB5/PC7 | PB0/PC8 | PB1/PC9 |
| TIM4 | PB6/PD12 | PB7/PD13 | PB8/PD14 | PB9/PD15 |
| TIM5 | PA0/PH10 | PA1/PH11 | PA2/PH12 | PA3/PI0 |
以TIM2和TIM3為例,引腳各取PA0和PC6,
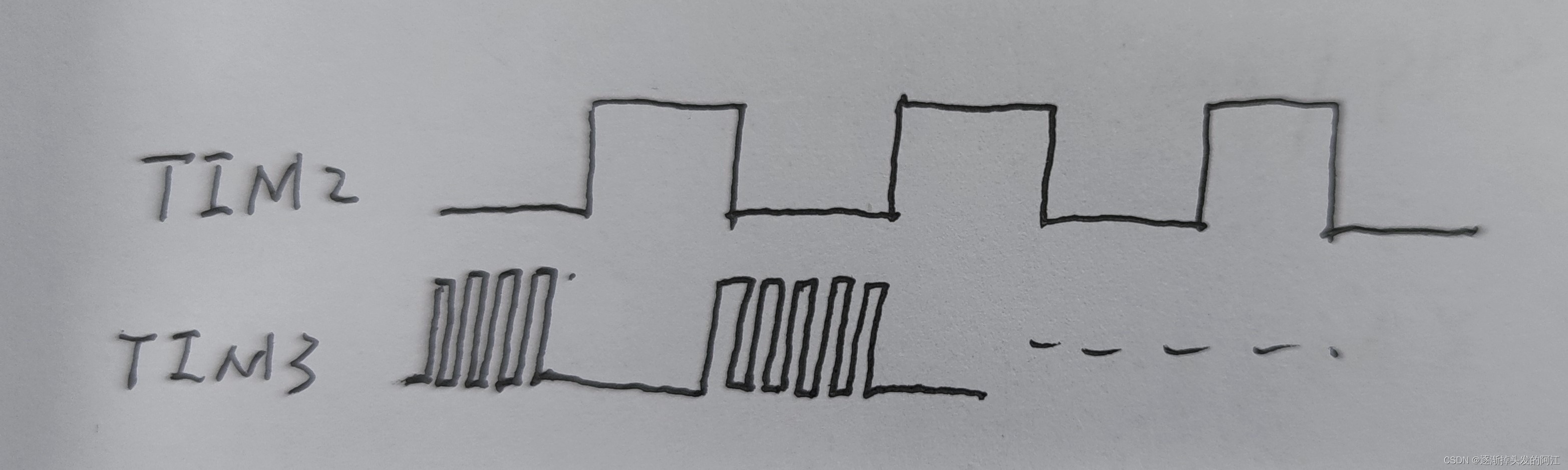
將TIM2設定為主模式,把PWM的參考電平OC1REF作為TRGO觸發輸出,
將TIM3設定為從模式的門控模式,將TIM2的TRG0作為觸發輸入,控制定時器的開啟和關閉,
只有當TIM2的PWM波為低電平時,TIM3才輸出PWM波,這樣當TIM3的PWM脈沖頻率一定時,只要控制TIM2的PWM波的占空比就可以控制TIM3的PWM脈沖輸出數量,
程式如下:
TIM2主模式初始化:
void TIM2_Config(u32 cycle)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能定時器時鐘
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能IO口時鐘
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM2);//PA0復用為定時器2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //復用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA0
TIM_TimeBaseStructure.TIM_Prescaler=8400-1; //定時器分頻
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上計數模式
TIM_TimeBaseStructure.TIM_Period=cycle; //自動重裝載值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure); //初始化定時器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性低
TIM_OC1Init(TIM2, &TIM_OCInitStructure); //初始化定時器通道
/*定時器主模式設定*/
TIM_SelectMasterSlaveMode(TIM2, TIM_MasterSlaveMode_Enable);
TIM_SelectOutputTrigger(TIM2, TIM_TRGOSource_OC1Ref);
TIM_Cmd(TIM2, ENABLE);
TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);//使能定時器在ccr上的預裝載暫存器
TIM_ARRPreloadConfig(TIM2,ENABLE);//ARPE使能
TIM_SetCompare1(TIM2,1000);
}TIM3從模式初始化:
void TIM3_Config(u32 PulseNum)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能定時器時鐘
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE);//使能IO口時鐘
GPIO_PinAFConfig(GPIOC,GPIO_PinSource6,GPIO_AF_TIM3);//PC6復用為定時器3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //復用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽復用輸出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOC,&GPIO_InitStructure); //初始化PC6
TIM_TimeBaseStructure.TIM_Prescaler=8400-1; //定時器分頻
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;//向上計數模式
TIM_TimeBaseStructure.TIM_Period=PulseNum; //自動重裝載值
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); //初始化定時器
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇PWM模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比較輸出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性低
TIM_OC1Init(TIM3, &TIM_OCInitStructure); //初始化定時器通道
/*定時器從模式設定*/
TIM_SelectInputTrigger(TIM3, TIM_TS_ITR1);
TIM_SelectSlaveMode(TIM3,TIM_SlaveMode_Gated );
TIM_Cmd(TIM3, ENABLE);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);//使能定時器在ccr上的預裝載暫存器
TIM_ARRPreloadConfig(TIM3,ENABLE);//ARPE使能
TIM_SetCompare1(TIM3,20);
}PWM控制輸出:
void Pulse_output(u32 cycle,u32 PulseNum)
{
TIM2_Config(cycle);
TIM_Cmd(TIM2, ENABLE);
TIM3_Config(PulseNum);
TIM_Cmd(TIM3, ENABLE);
}主函式:
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//設定系統中斷優先級分組2
delay_init(168); //初始化延時函式
uart_init(115200);//初始化串口波特率為115200
//LED_Init();
Pulse_output(2000-1,40-1);
while(1);
}TIM2產生周期為1S,占空比為50%的PWM波,
TIM3產生周期為0.1S,占空比為50%的PWM波,
理論是1S內TIM3產生5次PWM脈沖,示波器采集到的現象也是,
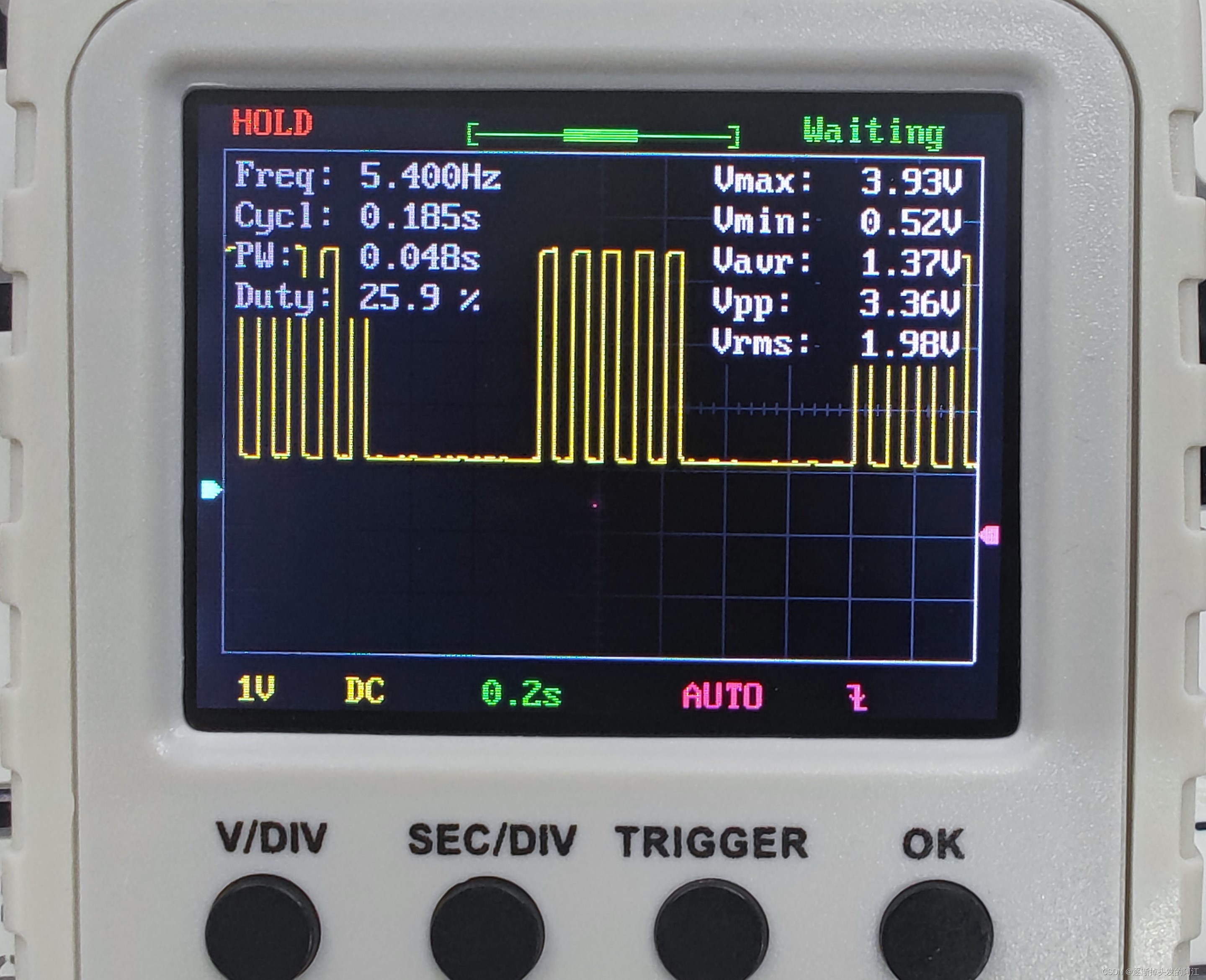
拓展:根據此可行的理論,可通過TIM2的定時器中斷來控制每次操作只輸出想要的脈沖數,由于手上的示波器過于簡單,因此實際實作會等后面專業示波器到手了再次實作,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/404189.html
標籤:其他
上一篇:超詳細JDK下載與安裝步驟
下一篇:模電總結(二)