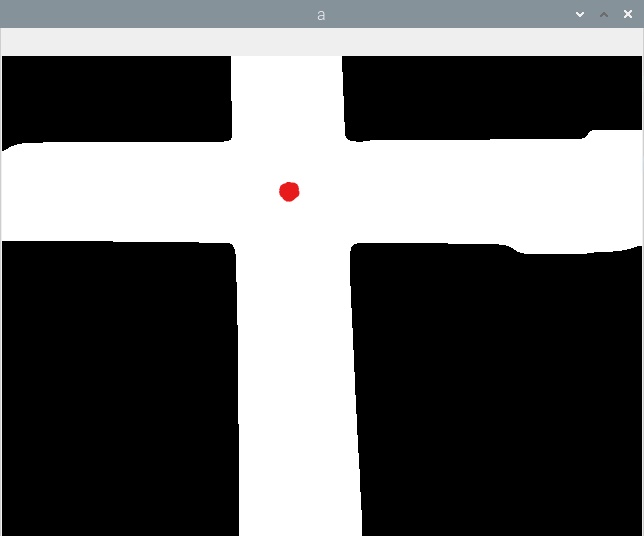
我想檢測十字的中心。但是由于這兩個矩形是相連的,所以我不知道如何找到它。例如,我有這些影像:
十字架 1
交叉 2
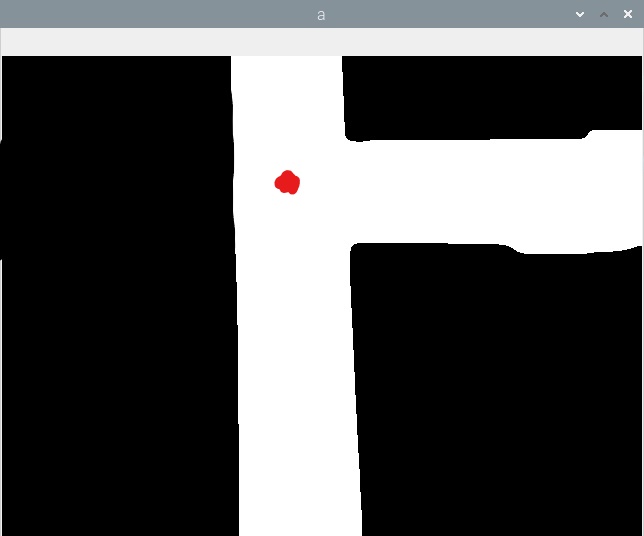
我想找到“紅點”。
uj5u.com熱心網友回復:
這個想法是垂直和水平線接觸的點是交叉點。一種潛在的方法是:
獲取二值影像。加載影像,轉換為灰度,高斯模糊,然后是 Otsu 的閾值。
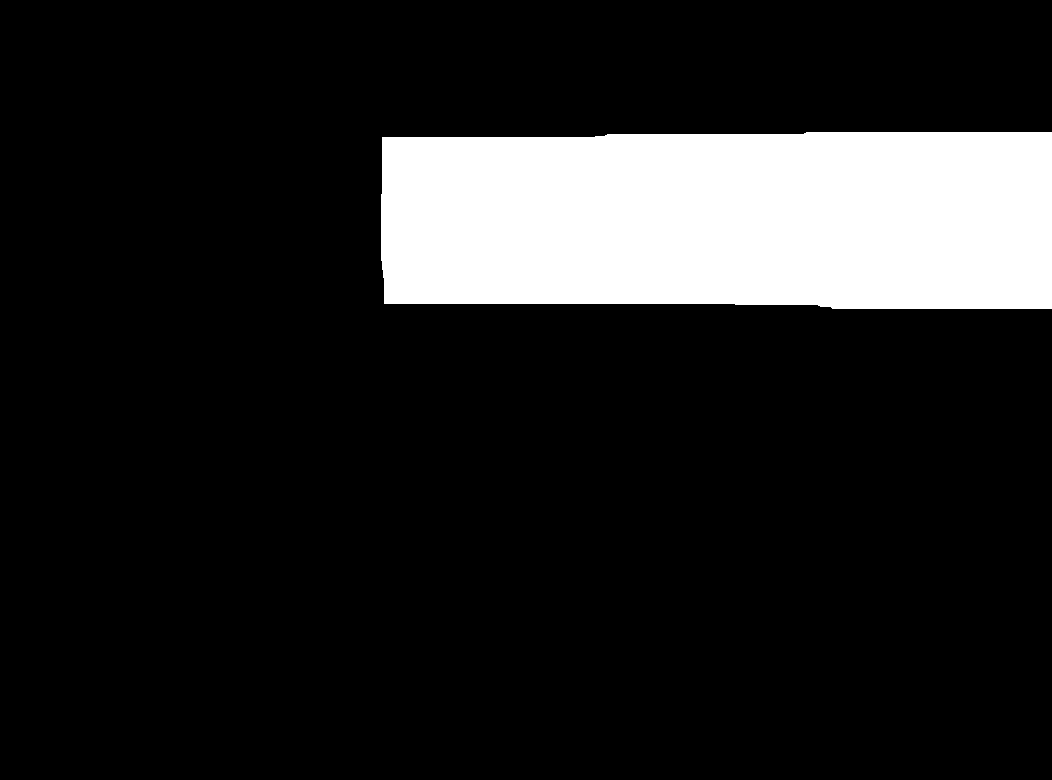
獲取水平和垂直線掩碼。創建水平和垂直結構元素,
cv2.getStructuringElement然后執行cv2.morphologyEx以隔離線條。尋找關節。我們
cv2.bitwise_and把兩個面具放在一起得到關節。在關節面罩上找到質心。我們找到輪廓然后計算質心以獲得交點。
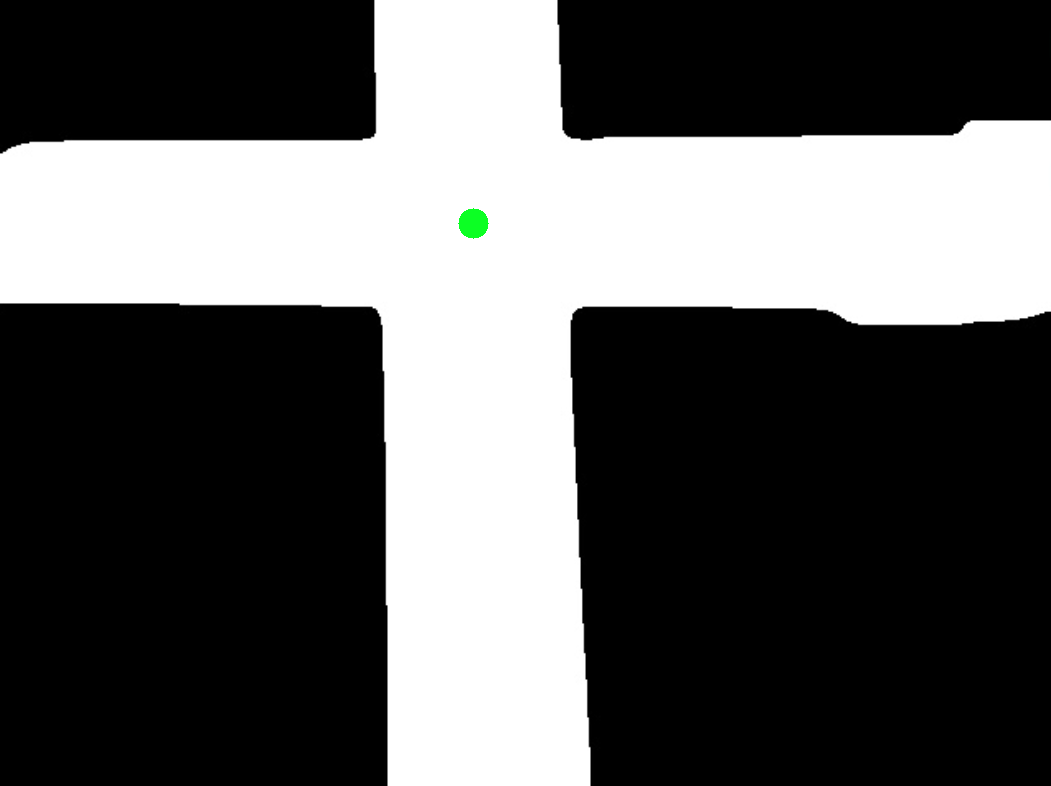
輸入影像->水平蒙版->垂直蒙版->關節
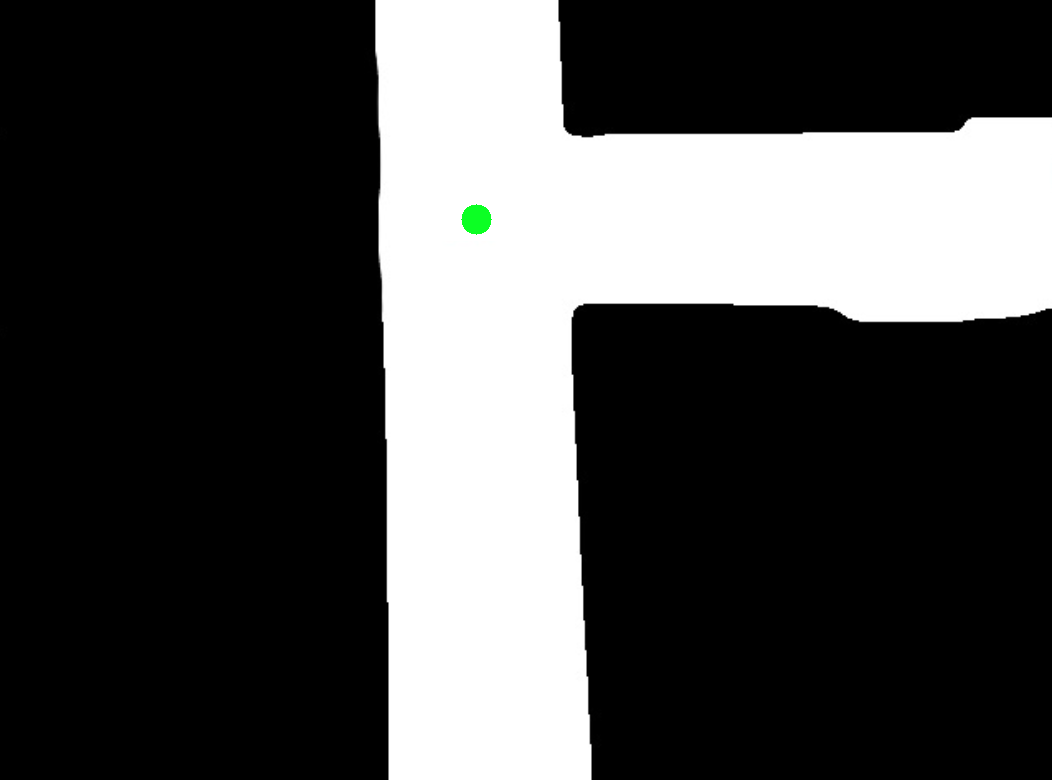
檢測到的綠色路口
其他影像的結果
輸入影像->水平蒙版->垂直蒙版->關節

檢測到的綠色路口
代碼
import cv2
import numpy as np
# Load image, grayscale, Gaussian blur, Otsus threshold
image = cv2.imread('4.PNG')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blur = cv2.GaussianBlur(gray, (3,3), 0)
thresh = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)[1]
# Find horizonal lines
horizontal_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (150,5))
horizontal = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, horizontal_kernel, iterations=2)
# Find vertical lines
vertical_kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,150))
vertical = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, vertical_kernel, iterations=2)
# Find joints
joints = cv2.bitwise_and(horizontal, vertical)
# Find centroid of the joints
cnts = cv2.findContours(joints, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
# Find centroid and draw center point
M = cv2.moments(c)
cx = int(M['m10']/M['m00'])
cy = int(M['m01']/M['m00'])
cv2.circle(image, (cx, cy), 15, (36,255,12), -1)
cv2.imshow('horizontal', horizontal)
cv2.imshow('vertical', vertical)
cv2.imshow('joints', joints)
cv2.imshow('image', image)
cv2.waitKey()
uj5u.com熱心網友回復:
這是一個可能的解決方案。它基于我在這里的回答:如何在 OpenCV - Python 中獲得沒有冗余的內部輪廓點。主要思想是將影像與識別交叉點的特殊內核進行卷積。在此操作之后,您將創建一個帶有可能交叉點的蒙版,應用一些形態學并獲取坐標。
您沒有提供輸入影像,我正在使用您發布的“交叉”影像測驗此演算法。這是代碼:
# Imports:
import cv2
import numpy as np
# Image path
path = "D://opencvImages//"
fileName = "cross.png" # Your "cross" image
# Reading an image in default mode:
inputImage = cv2.imread(path fileName)
# Prepare a deep copy of the input for results:
inputImageCopy = inputImage.copy()
# Grayscale conversion:
grayscaleImage = cv2.cvtColor(inputImage, cv2.COLOR_BGR2GRAY)
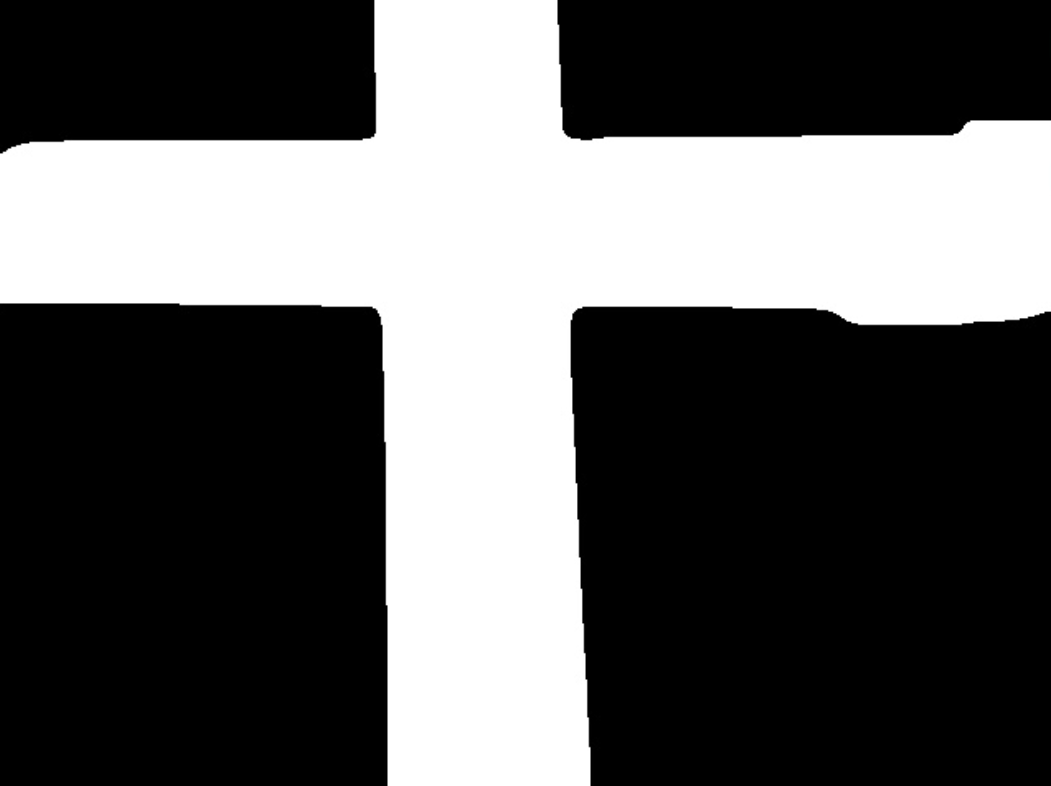
現在,卷積必須接收一個形狀已縮小到1 pixel寬度的影像。這可以通過計算影像的骨架來完成。骨架是二進制影像的一個版本,其中線條已被標準化為寬度為1 pixel. 然后我們可以將影像與內核進行卷積3 x 3并尋找特定的像素模式。
在計算骨架之前,我們將在影像周圍添加一個邊框。如果形狀一直延伸到影像的邊界,這可以防止骨架產生的一些偽影:
# Add borders to prevent skeleton artifacts:
borderThickness = 1
borderColor = (0, 0, 0)
grayscaleImage = cv2.copyMakeBorder(grayscaleImage, borderThickness, borderThickness, borderThickness, borderThickness,
cv2.BORDER_CONSTANT, None, borderColor)
# Compute the skeleton:
skeleton = cv2.ximgproc.thinning(grayscaleImage, None, 1)
這是骨架,沒有人工制品:

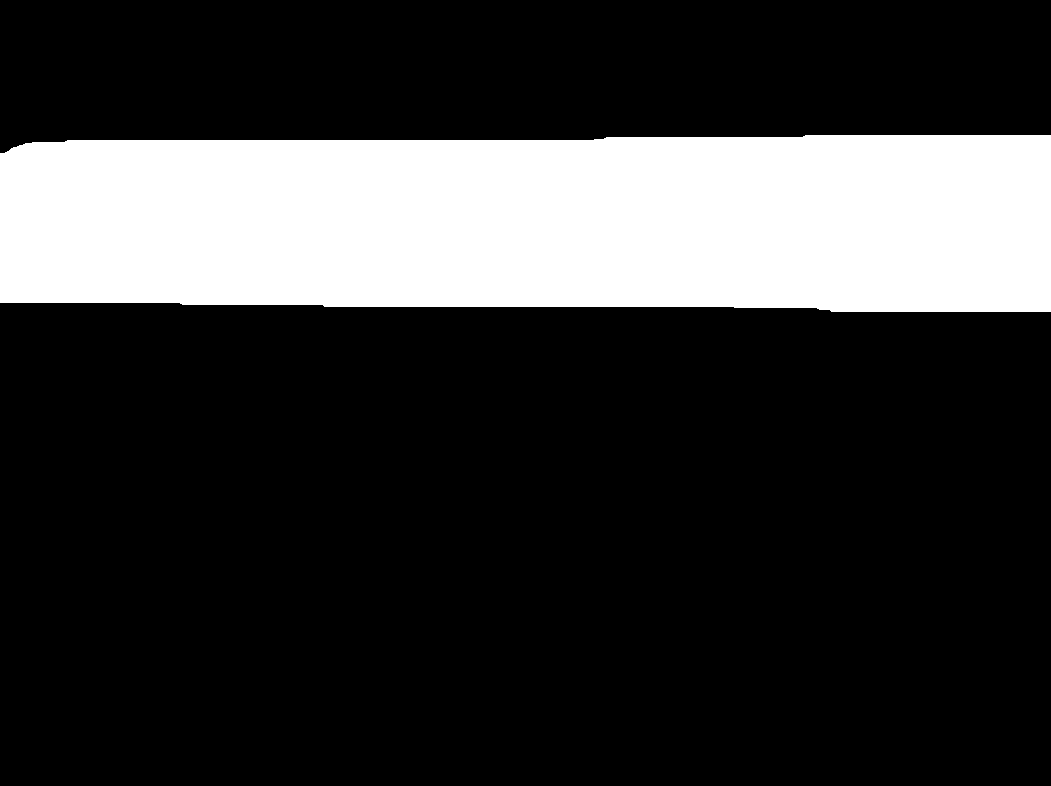
Now, let's find the intersections. The approach is based on Mark Setchell's info on this post. The post mainly shows the method for finding end-points of a shape, but I extended it to also identify line intersections. The main idea is that the convolution yields a very specific value where patterns of black and white pixels are found in the input image. Refer to the post for the theory behind this idea, but here, we are looking for a value of 130:
# Threshold the image so that white pixels get a value of 10 and
# black pixels a value of 0:
_, binaryImage = cv2.threshold(skeleton, 128, 10, cv2.THRESH_BINARY)
# Set the intersections kernel:
h = np.array([[1, 1, 1],
[1, 10, 1],
[1, 1, 1]])
# Convolve the image with the kernel:
imgFiltered = cv2.filter2D(binaryImage, -1, h)
# Prepare the final mask of points:
(height, width) = binaryImage.shape
pointsMask = np.zeros((height, width, 1), np.uint8)
# Perform convolution and create points mask:
thresh = 130
# Locate the threshold in the filtered image:
pointsMask = np.where(imgFiltered == thresh, 255, 0)
# Convert and shape the image to a uint8 height x width x channels
# numpy array:
pointsMask = pointsMask.astype(np.uint8)
pointsMask = pointsMask.reshape(height, width, 1)
This is the pointsMask image:
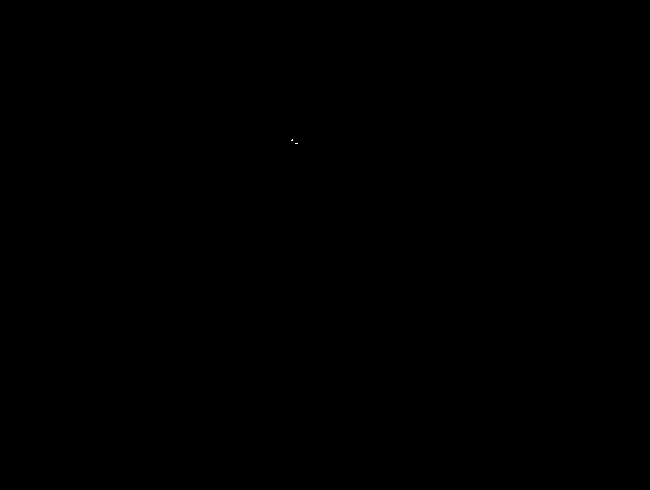
I we apply some morphology we can join individual pixels into blobs. Here, a dilation will do:
# Set kernel (structuring element) size:
kernelSize = 7
# Set operation iterations:
opIterations = 3
# Get the structuring element:
morphKernel = cv2.getStructuringElement(cv2.MORPH_RECT, (kernelSize, kernelSize))
# Perform Dilate:
pointsMask = cv2.morphologyEx(pointsMask, cv2.MORPH_DILATE, morphKernel, None, None, opIterations, cv2.BORDER_REFLECT101)
This is the result of applying the dilation:
Now, we can find the coordinates of the white pixels and compute their mean values (or centroids):
# Get the coordinates of the end-points:
(Y, X) = np.where(pointsMask == 255)
# Get the centroid:
y = int(np.mean(Y))
x = int(np.mean(X))
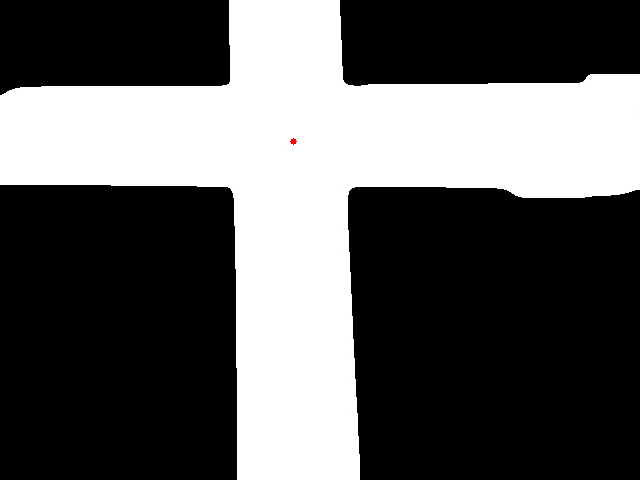
Let's draw a circle using these coordinates on the original image:
# Draw the intersection point:
# Set circle color:
color = (0, 0, 255)
# Draw Circle
cv2.circle(inputImageCopy, (x, y), 3, color, -1)
# Show Image
cv2.imshow("Intersections", inputImageCopy)
cv2.waitKey(0)
This is the final result:
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/446926.html