我是計算機視覺的新手,我想創建一個程式來幫助我檢測影像中的框并保存為影像。
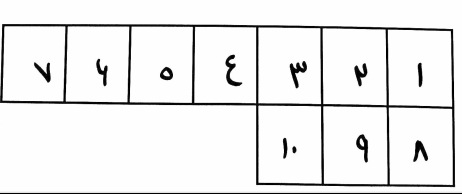


等等...我嘗試了一些代碼,但沒有得到我想要的結果。這是我的代碼及其輸出。
import cv2
# Load iamge, grayscale, adaptive threshold
image = cv2.imread('image.jpeg')
result = image.copy()
gray = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
thresh = cv2.adaptiveThreshold(gray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY_INV,51,9)
# Fill rectangular contours
cnts = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
cv2.drawContours(thresh, [c], -1, (255,255,255), -1)
# Morph open
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (9,9))
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=4)
# Draw rectangles
cnts = cv2.findContours(opening, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
cnts = cnts[0] if len(cnts) == 2 else cnts[1]
for c in cnts:
x,y,w,h = cv2.boundingRect(c)
cv2.rectangle(image, (x, y), (x w, y h), (36,255,12), 3)
cv2.imshow('thresh', thresh)
cv2.imshow('opening', opening)
cv2.imshow('image', image)
cv2.waitKey()
輸出:
uj5u.com熱心網友回復:
這是您的問題解決方案:
嘗試這個:
import cv2
import numpy as np
#Read input image
img = cv2.imread('hw_data.png')
#convert from BGR to HSV color space
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#apply threshold
thresh = cv2.threshold(gray, 30, 255, cv2.THRESH_BINARY)[1]
# find contours and get one with area about 180*35
# draw all contours in green and accepted ones in red
contours = cv2.findContours(thresh, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
contours = contours[0] if len(contours) == 2 else contours[1]
#area_thresh = 0
min_area = 0.95*180*44
max_area = 1.05*180*44
print(min_area)
print(max_area)
result = img.copy()
i = 1
for c in contours:
# print(c)
area = cv2.contourArea(c)
cv2.drawContours(result, [c], -1, (0, 255, 0), 1)
x,y,w,h = cv2.boundingRect(c)
# crop region of img using bounding box
region = result[y:y h, x:x w]
# save region to new image
print(region.shape,' i ',i)
# cv2.imwrite("black_region_{0}.png".format(i), region)
i = i 1
if region.shape[0]>70 and region.shape[1]<100:
cv2.imwrite("black_region_{0}.png".format(i), region)
# break
# if area > min_area and area < max_area:
# cv2.drawContours(result, [c], -1, (0, 0, 255), 1)
# break
# save result
# cv2.imwrite("box_found.png", result)
# show images
# cv2.imshow("GRAY", gray)
# cv2.imshow("THRESH", thresh)
# cv2.imshow("RESULT", result)
# cv2.waitKey(0)
uj5u.com熱心網友回復:
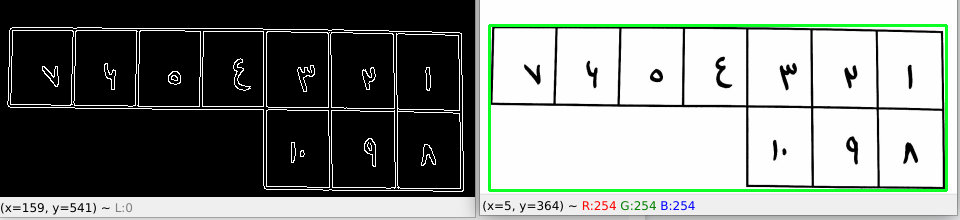
您需要做的只是首先洗掉最外面的白色區域,也就是說,將其設為黑色,以便我們可以使用cv2.RETR_EXTERNAL標志檢測沒有任何問題的框,因為它們沒有接觸。然后我們將一個一個地提取這些框。
為了去除最外面的區域,我使用了輪廓的點多邊形測驗。如果點 (1, 1) 位于輪廓內部或輪廓上,則不會繪制它,并且每隔一個輪廓將繪制在新影像上。從這張新影像中,我讀取了盒子輪廓并提取了它們。
import cv2
import numpy as np
img = cv2.imread("2lscp.png", cv2.IMREAD_GRAYSCALE)
ret, img = cv2.threshold(img, 50, 255, cv2.THRESH_BINARY cv2.THRESH_OTSU)
Contours = cv2.findContours(img, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)[-2]
newImg = np.zeros(img.shape, dtype=np.uint8)
for Contour in Contours:
if cv2.pointPolygonTest(Contour, (1, 1), False) == -1:
cv2.drawContours(newImg, [Contour], -1, 255, 1)
Contours = cv2.findContours(newImg, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2]
for Contour in Contours:
[x, y, w, h] = cv2.boundingRect(Contour)
cv2.imshow("box extracted", img[y:y h, x:x w])
cv2.waitKey(0)
cv2.destroyAllWindows()
uj5u.com熱心網友回復:
這種情況看起來特別簡單,因為影像是準二進制的。檢測白色區域的輪廓,并選擇面積占整個影像 10% 到 15% 的區域。這些是所需的盒子。然后適合矩形或旋轉矩形。
無需額外處理。
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/456521.html