目錄
- 識別效果圖
- 相關資源鏈接:
- 操作步驟:
- 1. 安裝PyTorch and Torchvision
- 2. 安裝 torch2trt
- 3. 安裝其他支持包
- 4. 安裝trt_pose
- 5. 安裝jetcam
- 6. 安裝installSwapfile
- 7. 下載模型
- 8. 安裝jupyter lab
- 9.安裝jtop
- 10. 運行live_demo.ipynb
- 其他
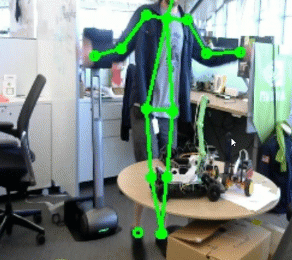
識別效果圖
相關資源鏈接:
deepstream_pose_estimation
Creating a Human Pose Estimation Application with NVIDIA DeepStream
trt_pose
pytorch-for-jetson
jetcam
操作步驟:
1. 安裝PyTorch and Torchvision
安裝的pytorch1.6.0版本對應的Torchvision是0.7.0,需要在jetson-nano上安裝
- 安裝PyTorch
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy torch-1.6.0-cp36-cp36m-linux_aarch64.whl
從CDSN下載個 torch-1.6.0-cp36-cp36m-linux_aarch64.whl即可 - 安裝Torchvision
sudo apt-get install libjpeg-dev zlib1g-dev libpython3-dev libavcodec-dev libavformat-dev libswscale-dev
直接git clone https://github.com/pytorch/vision torchvision 一般不會成功
可以先用碼云復制到自己的空間,再選擇0.7.0版本下載,
放到jetson-nano上以后,unzip
cd vision
export BUILD_VERSION=0.7.0
python3 setup.py install
2. 安裝 torch2trt
git clone https://github.com/NVIDIA-AI-IOT/torch2trt
cd torch2trt
sudo python3 setup.py install --plugins
3. 安裝其他支持包
sudo pip3 install tqdm cython pycocotools
sudo apt-get install python3-matplotlib
4. 安裝trt_pose
git clone https://github.com/NVIDIA-AI-IOT/trt_pose
cd trt_pose
sudo python3 setup.py install
5. 安裝jetcam
jetcam用于jetson對攝像頭的支持,后面運行live_demo.ipynb需要用到
git clone https://github.com/NVIDIA-AI-IOT/jetcam
cd jetcam
sudo python3 setup.py install
6. 安裝installSwapfile
設定Swap是因為jetson-nano運行trt-pose本身的4G記憶體不夠,
git clone https://github.com/JetsonHacksNano/installSwapfile
sudo ./installSwapfile/installSwapfile.sh
默認是6G的大小,使用的是SD卡的空間,
7. 下載模型
下載模型直接從https://github.com/NVIDIA-AI-IOT/trt_pose下載resnet18_baseline_att_224x224_A即可,谷歌瀏覽器可順利下載,
8. 安裝jupyter lab
sudo apt install nodejs npm
sudo pip3 install pillow==6.2.2 -i https://pypi.tuna.tsinghua.edu.cn/simple
pip3 install jupyter jupyterlab
sudo reboot //重啟
9.安裝jtop
pip3 install jetson-stats
安裝完成后運行 jtop可以看jetson板卡各種資源使用情況,
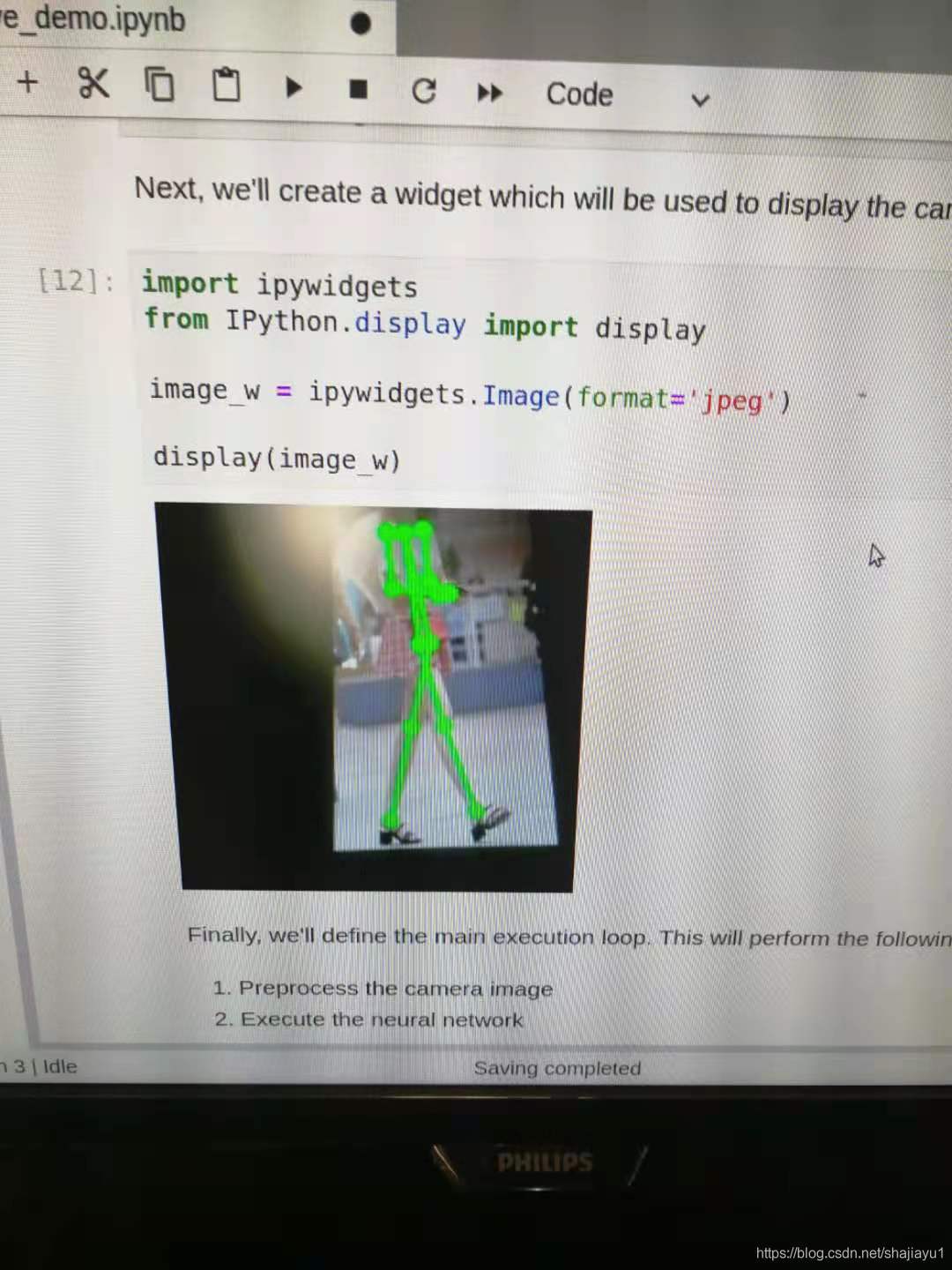
10. 運行live_demo.ipynb
需要先把模型檔案拷貝到tasks/human_pose,
在jetson-nano插入usb攝像頭
cd tasks/human_pose
jupyter lab
然后全部運行即可
上一張效果圖
這個腿是不是不錯,哦不對,這個腿識別的是不是不錯~
其他
關于deepstream_pose_estimation,沒有在jetson-nano上運行成功,估計是記憶體的問題,問題出在了ONNX檔案讀取生成engine檔案,可以考慮在PC上運行或者性能更高的jetson板卡上運行,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/258987.html
標籤:其他