本篇博文主要使用HAL庫和CubeMX進行代碼示例,畢竟電賽時間那么緊張,寫STP庫的時間都夠CubeMX重開一局了
直流電機控制
根據電機學,直流電機轉速
n
=
U
?
I
R
K
?
n=\frac{U-IR}{K\phi}
n=K?U?IR?
其中U為電樞端電壓,I為電樞電流,R為電樞電路總電阻,Φ為每極磁通量,K為電機結構引數
直流電動機的轉速控制方法有兩種
- 勵磁控制法:對勵磁磁通進行控制
- 電樞控制法:對電樞電壓進行控制
勵磁控制閥在低速狀態下收到磁極飽和限制,在高速時受換向火花和換向器結構強度的限制,動態回應較差,因此很少使用;大多數應用場合都使用電樞電壓控制法,在保證勵磁恒定的情況下使用單片機或相關電子器件輸出PWM來直接實作直流電動機調速
直流電機調速
直流電機的調速思路就是“力大磚飛”,在電機控制線兩端加適當電壓,電壓越高轉速越快,可以通過功率半導體器件產生恒定的電壓供給電機;對于數字器件而言很難控制電壓精準保持在某一模擬值,因此使用PWM進行調速,
無論是模擬方法還是數字方法,都需要使用功率半導體器件,只不過使用方式有所不同,模擬電路通過線性放大的驅動方式,輸出波動小、線性好,對臨近電路干擾小,但存在效率低和散熱問題;而數字電路通過耦合器件發出PWM使功率器件輸出方波加在電機兩端,通過改變方波的占空比來實作調節電機轉速,往往對臨近電路存在干擾,但是更易于實作,
基于PWM調速的電路往往包含三個部分
驅動電路
一般使用晶體管或場效應管構成的半橋、全橋、三相橋電路,或直接使用護照那用的電機驅動功率IC,
常見的電機驅動芯片有L298N、ULN2003等
半橋拓撲采用推挽輸出,需要保證兩晶體管不同時開合
全橋拓撲又稱H橋,需要確定一個死區時間,在同一時間只有兩個對稱的橋臂晶體管導通,絕對不能讓四路晶體管同時導通
三相橋需要更嚴謹的時間控制,如果出現橋臂同時導通的情況很可能導致炸管
三者適用的功率逐次增大
還要注意電機兩端應跨接續流二極管
隔離電路
一般來說直流電機的驅動電壓都在6V及以上,而常見的MCU供電、輸出電壓都在3.3V-5V,因此二者之間通常需要隔離
隔離器件可以是光耦、數字隔離器等
通常由于隔離設備的驅動能力不足,還需要在輸出端加入三極管、場效應管放大電路或圖騰柱推挽輸出電路,比較方便的解決方案是直接使用達林頓管對電機進行控制,但是需要考慮達林頓管的耐壓和發熱
控制電路
大多數MCU都具有PWM輸出功能,高性能的MCU往往還會配備控制死區時間、可以快速調節占空比、實作多路PWM同步/反相的高級控制功能;低端MCU也往往可以通過延時程式配合GPIO輸出實作不精確的PWM功能
改變占空比的基本控制方法有:
- 定寬調頻法:保持PWM占空比不變,改變輸出頻率
- 定頻調寬法:保持PWM頻率不變,改變占空比
- 調頻調寬法:不常用,同時改變頻率和占空比
基于stm32f407的HAL庫實作
首先需要設定CubeMX或自己撰寫的外設初始化代碼,配置好PSC暫存器和ARR暫存器,保證恒定的PWM頻率
如果使用CubeMX只要可視化地調節選項即可;如果自己撰寫可以參考如下代碼
htim1.Instance = TIM1; //選擇定時器實體
htim1.Init.Prescaler = 0; //這里設定PSC暫存器值
htim1.Init.CounterMode = TIM_COUNTERMODE_UP; //這里設定定時器模式
htim1.Init.Period = 65535; //這里設定ARR暫存器值
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //這里設定分頻值
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //這里設定是否使能自動重裝計數器
使用定時器前需要先開啟PWM通道
HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_x);
//函式原型如下
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
然后通過在應用程式內修改比較值來實作定頻調寬法
__HAL_TIM_SetCompare(&htimx, TIM_CHANNEL_x, PWM_CompareValue);
//宏函式原型如下
#define __HAL_TIM_SetCompare __HAL_TIM_SET_COMPARE
#define __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) :\
((__HANDLE__)->Instance->CCR4 = (__COMPARE__)))
//__HAL_TIM_SetCompare是老版本HAL庫用法,新版本里為了統一宏函式,使用了lagency.h檔案來對__HAL_TIM_SetCompare進行重定向,它和新版本的函式__HAL_TIM_SET_COMPARE等效
特別地,HAL庫允許直接修改CCR來改變定時器比較值
htimx.Instance->CCRn = PWM_CompareValue;
步進電機控制
步進電機是一種將電脈沖轉化為角位移的電機機構,當它收到一個脈沖信號,就會按照設定的方向轉動一個固定的角度,該角度稱為電機的步距角,可以通過控制脈沖個數來控制角位移量;可以通過控制脈沖頻率實作步進電機的調速
步進電機的轉子一般為多極分布,定子上嵌有多相星形連接的控制繞組,每輸入一次電脈沖信號,轉子就旋轉一步,步進電機的種類很多,可大致分成:
- 反應式
- 永磁式
- 混合式
還可以按相數分為單相、兩相、三相三種
如果給處于錯齒狀態的相通電,則轉子會向磁導率最大、磁阻最小的位置轉動,也就是趨于齒運動
一個步進電機中往往還會加入減速裝置來讓其達到更高的精度,獲得更高的轉動力矩,
基于stm32f407的HAL庫實作
首先使用CubeMX或自行撰寫初始化代碼對外設進行配置 ,主要配置的引數如下所示
htim8.Instance = TIM8; //選擇合適的定時器
htim8.Init.Prescaler = 500; //配置預分頻器
htim8.Init.CounterMode = TIM_COUNTERMODE_UP; //設定計數模式
htim8.Init.Period = 2000; //配置重裝載值
htim8.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim8.Init.RepetitionCounter = 0;
htim8.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfigOC.Pulse = 1000; //設定預定頻數
使用以下函式開啟PWM輸出
HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_x);
一般來說使用步進電機的基本方式是精準控制其行進步數,可以通過中斷回呼函式實作功能
HAL_TIM_PWM_Start_IT(&htim8, TIM_CHANNEL_1); //初始化時開啟中斷
HAL_TIM_PWM_Stop_IT(&htim8, TIM_CHANNEL_1); //要設定頻率引數前必須關閉中斷
TIM8->PSC = 71; //將目標定時器8修改為72分頻
//在之后的回呼函式里再次打開中斷
通過定義中斷回呼函式即可實作步數控制功能
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM8)
{
if(count < 100)
{
count++; //計算步數
}
else
{
count = 0;
HAL_TIM_PWM_Stop_IT(&htim8, TIM_CHANNEL_1); //再次打開中斷
}
}
}
可以通過輸出不同引腳的信號到電機控制器來控制步進電機的正反轉
基于步進電機專用控制IC的實作
為了更簡便、精準地控制步進電機,常使用MCU搭配專用的電機控制IC來驅動電機——TI生產的DRV8824/8825以及更為常見的A4988都可以用來驅動常見的兩相步進電機,一般根據datasheet中的典型應用設計出專用于控制步進電機的模塊電路來實作控制功能,除了一般的正反轉外,模塊還提供了步進細分功能,下面分別以DRV8825和A4988步進電機驅動模塊為例說明
步進電機的步進細分控制是由驅動器精確控制步進電機的相電流來實作的,細分會讓電機運轉更加平滑;換句話說,細分控制就是讓驅動電路在輸出脈沖的同時控制輸出電壓來實作電機的平滑啟動和步進停止
-
DRV8825模塊
DRV8825是TI的集成步進電機驅動芯片,芯片內部集成了2個H橋和1/32微步進分度器,可以驅動一個雙極型電機或兩個直流有刷電機,輸入電壓范圍8.2~45V,可以提供1.75A的驅動電流, 芯片在24V、25°C的作業狀態下可提供2.5A的峰值電流,芯片還集成了短路、過熱、欠壓及交叉傳導保護電路,能夠檢測故障狀況并迅速切斷H橋,從而保護電機
適用的電機型別:DRV8825驅動電機的型別主要與電機作業電流有關,理論上作業電流小于2A的步進電機都可以驅動,基于安全考慮,芯片上不加散熱片,電流最好控制在1.5A以下;如果加散熱片,電流峰值可到2.5A,
模塊接線如下:
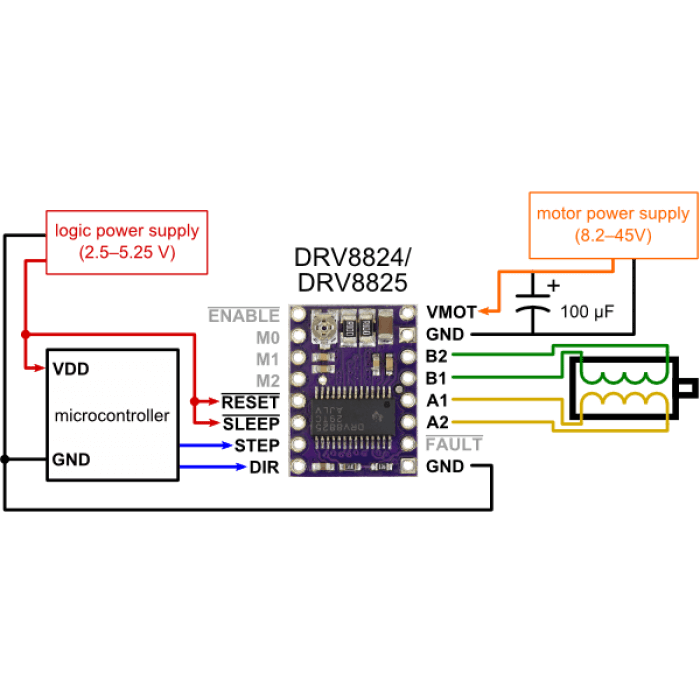
其中需要數字、模擬部分分別接地,一般來說VMOT旁邊的GND是功率地,另一個GND則是數字地,同時功率電源需要接入100uF的旁路電容來減輕對數字部分的影響
ENABLE引腳用于控制該模塊是否啟用,默認該引腳拉低,模塊始終啟用;RESET負責復位模塊;SLEEP用于控制進入低功耗睡眠模式,當不使用電機時可以下拉該引腳來將功耗降到最低;三個引腳都是低電平有效,所以正常使用時都應接VCC(數字電源)
FAULT引腳(FLT)用于指示故障,一旦由于過電流保護或熱關斷,IC內部禁用H橋FET時,該引腳就會輸出低電平,一般來說該引腳會在模塊內部與SLEEP引腳短路,起到自動故障復位的效果
STEP引腳用于驅動電機轉動,需要輸入PWM波,頻率越高,電機轉動越快
DIR引腳用于控制電機轉動方向,高電平正轉,低電平反轉
步進電機可以對應連接1B-1A-2A-2B、2B-2A-1A-1B、1A-1B-2B-2A、2A-2B-1B-1A,主要取決于需要的轉動方向,總之只要同一相的兩根線接到對應相的驅動引腳即可;特別地,如果電機不能正常運行,抖動嚴重,有可能是驅動板沒有焊接好或某一相斷開或兩相接錯導致缺相、錯相;如果步進電機沒有按照正確的順序進行連接,可能導致無法作業或轉動方向例外;如果步進電機扭力不足乃至丟步,可以嘗試加大DRV8825的輸出電流,驅動板上一般會搭配一個精密電位器用于調節輸出電流,嘗試調節該電位器來獲取更好的輸出效果,精密電位器與輸出電流限制的計算公式為:限制電流 = 電位器電壓 * 2,單位A
通過控制M0、M1、M2的接地和接VCC(數字電源),可以根據下表來實作不同精密度的步進細分控制
M0 M1 M2 細分型別 Low Low Low Full step High Low Low 1/2 step Low High Low 1/4 step High High Low 1/8 step Low Low High 1/16 step High Low High 1/32 step Low High High 1/32 step High High High 1/32 step -
A4988模塊
相關控制方法與DRV8825基本一致,引腳也同理,兩者最大的差別在于驅動電流和價格
A4988價格更低,但是峰值驅動電流只有2A,內阻典型值為320Ω,最大耐壓35V,所以DRV8825可以用來取代A4988,但是A4988不能取代DRV8825
舵機控制
舵機也稱伺服電機、伺服驅動器,它接受一定的控制信號,輸出一定的角度,適用于需要角度不斷變化并可以保持的控制系統
舵機實際上是一個獨立的倍訓控制系統,通過其內部的機械或電路反饋控制其角度
作業程序如下:
- 控制器向舵機發出控制信號
- 內部電路判斷轉動方向
- 驅動電路控制無核心馬達轉動
- 動力通過減速齒輪傳送到擺臂
- 位置檢測器回傳擺臂資料
- 如果未達到指定位置則繼續運動,否則停止
其中位置檢測器一般使用可變電阻,當舵機轉動時電阻值會跟著改變,由此可以判斷舵機是否達到指定位置
舵機控制方法
標準舵機由電源、地線、控制線三條連接線,電源電壓通常為4-6V,一般使用5V供電即可,但是需要電源帶載能力夠強,控制線一般輸入方波信號,周期一般為20ms(頻率50Hz)即可,具體情況應查看舵機生產商的說明,通過改變方波的占空比來改變舵機的角度,舵機角度和脈沖寬度成正比
舵機一般可以提供相當強的扭力,所以可以選擇大扭力舵機用在機械臂等需要高強度的地方
基于stm32f407的HAL庫實作
數字舵機依靠PWM進行控制,對于180°的舵機,一般周期為20ms(頻率為50Hz),脈寬為500–2500us,其中為1500us使得舵機轉輪處于中間位置,即90°位置,如果在500-1500us和1500–2500us之間則分別會朝著0–90°和90–180°的方向旋轉,給定固定占空比,舵機則會轉到相應的角度,計算公式如下:
占
空
比
D
=
1
90
?
角
度
θ
+
0.5
占空比D =\frac{1}{90} *角度\theta + 0.5
占空比D=901??角度θ+0.5
對應HAL庫實作如下
void Servo_Control(uint16_t angle) //angle為角度值,0~180
{
float temp;
temp = (1.0 / 90.0) * angle + 0.5;//占空比值 = 1/9 * 角度 + 5
__HAL_TIM_SET_COMPARE(&htimx, TIM_CHANNEL_n, (uint16_t)temp);
}
使用下面的代碼使能定時器時基單元和PWM輸出
HAL_TIM_Base_Start(&htimx);
HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_n);
使用下面的代碼關閉定時器時基單元和PWM輸出
HAL_TIM_Base_Stop(&htimx);
HAL_TIM_PWM_Stop(&htimx, TIM_CHANNEL_n);
還可以直接通過改變CCR暫存器的值來控制舵機
TIMx->CCRn = 10;
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/291362.html
標籤:其他
上一篇:【OpenCV】??高手勿入! 半小時學會基本操作 15?? 直方圖
下一篇:我漂了~~