原創開源思路下載鏈接,允許轉賣
鏈接:https://pan.baidu.com/s/13aSy2-hlkLa7Ps8wknYY1Q
提取碼:gap4
這里有百種演算法出處整理,本題演算法可從上面找取:
給裸賽的家人們整理了百種演算法出處https://mp.weixin.qq.com/s/OhWRCeep885MuyhMhvdiOw
附件1畫的圖,為每塊反射面鏈接主鎖節點的位置
X=xlsread('附件1.csv');
figure
plot3(X(:,1),X(:,2),X(:,3),'*')
附件2畫的圖,每個主鎖有上下兩端點,為什么要給呢,一是主鎖傾斜方向為促動器的拉伸方向,二是結合附件1可以得到每塊反射面基準態時的傾斜方向角度,反射面傾斜角度用上端點計算

X=xlsread('附件2.csv');
figure
plot3(X(:,1),X(:,2),X(:,3),'b*')
hold on
plot3(X(:,4),X(:,5),X(:,6),'r*')有些同學會發現,附件1和附件2的上端點對不上,確實是的,但是每個上端點與反射面角點的間距是固定的,所以后面改變下拉索伸縮時,反射面角點的位置也是需要重新計算的
附件3結合附件1畫的圖
[~,~,X1]=xlsread('附件1.csv');
[~,~,X2]=xlsread('附件3.csv');
X1=string(X1);X2=string(X2);
X1(1,:)=[];X2(1,:)=[];
figure
hold on
a=[];b=[];c=[];
for i=1:size(X2,1)
a=find(X1(:,1)==X2(i,1));
b=find(X1(:,1)==X2(i,2));
c=find(X1(:,1)==X2(i,3));
plot3(double(X1([a,b,c],2)),double(X1([a,b,c],3)),double(X1([a,b,c],4)),'b-*')
end
中國天眼圖,這道題可以不用考慮每個主鎖節點和反射面的重量,題目也沒給,實際中就算是有重量,基準態時促進器也會給予一定作用力來保持球面形貌,在這道題中我們就假設基準球面是一個球形面,并且作業態時的照射面會形成一個小的球形面
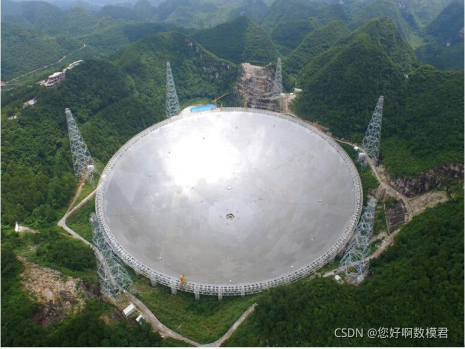
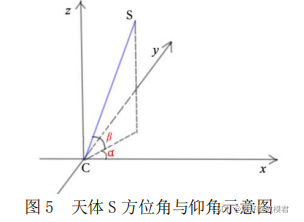
題目中的α和β為方位角和仰角,注意α是x與y軸的夾角,β是CS線與xy平面的夾角
來看下附錄:第7點需要理解下
基準狀態下,促動器頂端徑向伸縮量為0,其徑向伸縮范圍為-0.6~+0.6 米,這個條件就是剛剛說到的基準態時促進器也會給予一定作用力來保持圓球形貌,所以會有一個伸縮控制范圍,但是需要注意調整作業拋物面需要促動器聯動,一個促動器是產生不了什么作用的,那么如何分析呢,其實SC直線與基礎球形面的垂線的交點就是照射面的中心,那么我們可以認為該中心的下拉索收縮幅度最大,而照射球面邊界會有一定伸縮,其實我們結合實際想想,最后會形成一個近似圓球體的橢球體面,橢球體公式為x2/a2+y2/b2+z2/c2=K,怎么去推算具體的公式,我們可以通過中心點和邊界點坐標去推算,為了多將光線反射值饋源艙,肯定照射面中心盡可能的凹陷,那么對于邊界點的下拉索就是盡可能的伸長,促動器作用的伸縮范圍給了,并且附件2也給了初始狀態主鎖角度,就可以去推算這幾個點的位置從而求解出橢球體公式
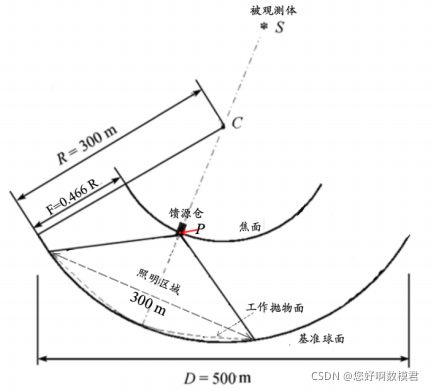
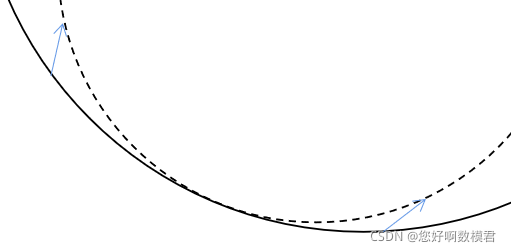
其實這道題我說是一個優化問題,可以觀察這幅圖可以看出,CS線與基準球面相角的點所對應的促動器是向內收縮的,以該點為中心散開方向的促動器基本都是不同程度的伸張,這樣才能重新構成一個短半徑比基準球半徑更小的橢球體,照明以外的促動器可以視為不動;照明的確定,以SC線與基準球面交點為中心,照明區在SC方向上的半徑為最近的邊界點到SC直線的距離;這里我們尋優,我們可以觀察照明中心的位置,再結合邊界,邊界處促動器最大伸縮是0.6米,就看能夠成多小短半徑的橢球體面了,這樣可以求得一個橢球體短半徑范圍作為自變數,根據短半徑并推算出一些參考點得到橢球體公式,然后反過來去推算照明區域內反射面各角點位置和每個促動器的伸縮量,就好比下圖,怎么計算,兩個大小不等的圓半徑,取距離中心同樣長的弧度位置,上面的取相應的點并與基礎球面計算距離,就可以計算出伸縮量了
這題大概就這么做,有些同學嘗試用微分模型去解決,但是始終需要伴隨尋優確定一個最佳橢球體,在第一問中,可以先找S點與基準球面的垂線,然后確定照明區域,然后定一個橢球體短半徑范圍,在這個范圍里,尋優,每種半徑下會得到不同切斜角度的反射片,目標函式就是反射片垂線能到達饋源艙的片數,求最大,做成單目標尋優問題
第三問則是要考慮上饋源艙接受照射面積,題目說的是半徑為1的圓盤,目標函式改為反射到了饋源艙上總計多少面積,求最大,這里面積可以這么來求,反射面為三角形,以饋源艙的垂線方向進行映射,映射后的圖形,以中心畫直徑為1的圓,再計算重疊面積
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/299064.html
標籤:其他
下一篇:復雜度來源:高性能