藍色
紫色
紅色
SLAM:同時定位與地圖構建
”搭載特定傳感器的主體,在沒有環境先驗資訊的情況下,于運動程序中建立環境的模型,同時估計自己的運動“
若傳感器主要為相機,即為視覺SLAM,
兩類傳感器
安裝在環境中的(eg. 二維碼Marker/GPS/導軌/磁條)
要滿足外部環境約束才能進行定位作業,(eg. 要有GPS信號,要能鋪設導軌)
攜帶于機器人本體上的(IMU/激光/相機)
IMU:慣性測量單元-wiki,是測量物體三軸姿態角(或角速率)以及加速度的裝置,
測到的通常都是一些間接的物理量而不是直接的位置資料,從這些物理量推測自己的位置,
- 輪式編碼器-輪子轉動的角度
- IMU-測量運動的角速度和加速度
- 相機和激光則讀取外部環境的某種觀測資料
優點:無環境要求,適用于未知環境,
激光 -Lasers
好處:精確、快速、較長的研究歷史(成熟的方法)
壞處:重、貴
相機 -Camera
以一定速率拍攝周圍的環境,形成一個連續的視頻流,普通的攝像頭能以每秒鐘30 張圖片的速度采集影像,按照作業方式分為單目、雙目、深度相機,

好處:便宜、輕巧、資訊豐富
壞處:需要較高的計算資源 (處理視頻流),需要在一定的作業條件下 (eg. 光線要充足、不能被遮擋、環境要是有紋理的 如果是一片白,并不能夠通過相片的移動來估計自身的運動)
相機的本質
-
以二維投影形式記錄了三維世界的資訊
-
丟掉了一個維度:距離
各類相機的主要區別:是否有深度資訊
- 單目:沒有深度,必須通過移動相機產生深度 Moving View Stereo
- 雙目:通過視差計算深度 Stereo
- RGBD:通過物理方法測量深度
單目相機 -Monocular
無法通過單個圖片來計算場景中物體離我們的距離,而距離資訊是SLAM中非常關鍵的部分,
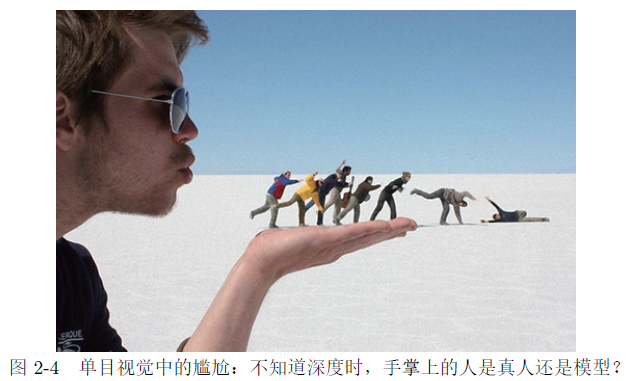
由于單目相機只是三維空間的二維投影,所以,如果我們真想恢復三維結構,必須移動相機的視角,
單目SLAM中同理,我們必須移動相機之后,才能估計它的運動(Motion),同時估計場景中物體的遠近和大小,不妨稱之為結構(Structure),
Motion:相機往右 -> 影像中物體往左
Sturcture:近處物體移動快,遠處物體移動慢
相機移動時,這些物體在影像上的運動,形成了視差,通過視差可以定量判斷物體的遠近,
單目相機最大缺點在于 無法確定真實的尺度 -尺度不確定性
單目相機可以知道物體的相對遠近,卻無法感知真實物體的大小,
把相機運動和場景大小同時縮放k倍,單目所看到的像都是一樣的,即單目SLAM 估計的軌跡和地圖,將與真實的軌跡和地圖,相差一個因子:尺度(Scale)
單目SLAM應用難度大本質原因是:通過單張影像無法確定深度(兩個原因:平移之后才能計算深度,以及無法確定真實尺度)
雙目相機 -Stereo
雙目相機和深度相機的目的,在于通過某種手段測量物
體離我們的距離,克服單目無法知道距離的缺點,如果知道了距離,場景的三維結構就可以通過單個影像恢復出來,也就消除了尺度不確定性,
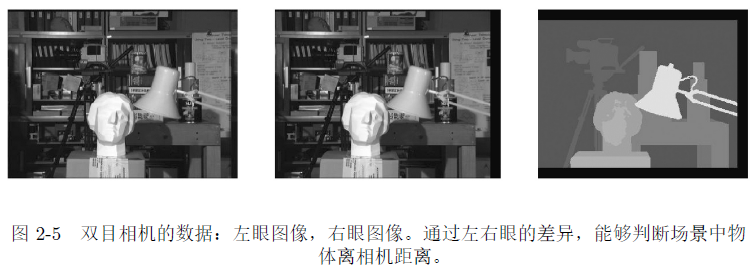
雙目相機由兩個單目相機組成,但這 兩個相機之間的距離(稱為基線(Baseline))是已知的,我們通過這個基線來估計每個像素的空間位置,可以再擴展成多目相機,
注意:雙目相機測量到的深度范圍與基線相關,基線距離越大,能夠測量到的就越遠,
雙目相機的距離估計是比較左右眼的影像獲得的,并不依賴其他傳感設備,適用于室內外環境,
雙目或多目相機的缺點是配置與標定均較為復雜,其深度量程和精度受雙目的基線與解析度限制,而且視差的計算非常消耗計算資源,需要使用GPU 和FPGA 設備加速后,才能實時輸出整張影像的距離資訊,計算量 是目前雙目的主要限制原因之一,
深度相機 -RGB-D
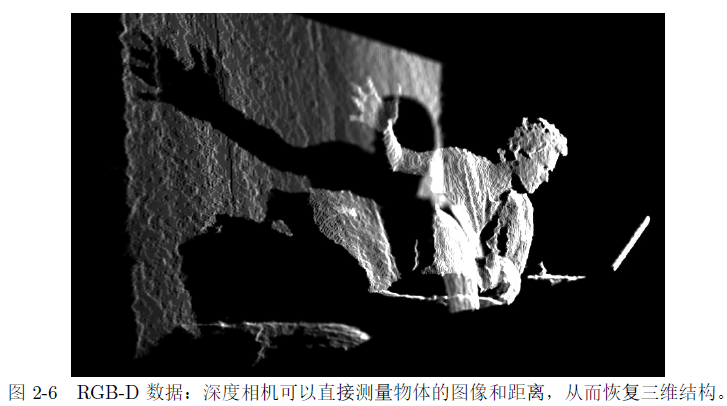
最大的特點 是可以通過紅外結構光或Time-of-Flight(ToF)原理,像激光傳感器那樣,通過主動向物體發射光并接識訓傳的光,測出物體離相機的距離,物理測量,相比雙目可節省大量計算
目前常用的RGB-D 相機包括Kinect/Kinect V2、Xtion live pro、Realsense 等,
現在多數 RGB-D 相機還存在測量范圍窄、噪聲大、視野小、易受日光干擾、無法測量透射材質等諸多問題,在SLAM 方面,主要用于室內SLAM,室外則較難應用,
經典視覺SLAM框架
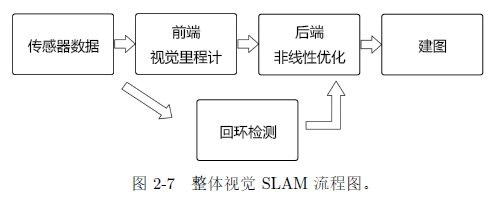
視覺里程計 ?Visual Odometry
實際的里程計:只計算相鄰時刻的運動,而和過去的資訊無關,
視覺里程計:關心相鄰影像之間的相機運動,并需要精確地測量這段運動資訊(eg. 旋轉了多少度,平移了多少厘米),
視覺SLAM 中,我們只能看到一個個像素,知道它們是某些空間點在相機的成像平面上投影的結果,通過相機成像原理和空間點的幾何關系可以定量估計相機運動,
VO 能夠通過相鄰幀間的影像估計相機運動,并恢復場景的空間結構,
存在的問題:僅通過視覺里程計來估計軌跡,將不可避免地出現累計漂移(Accumulating Drift),視覺里程計(在最簡單的情況下)只估計兩個影像間運動,每次估計的誤差都會傳遞到下一時刻
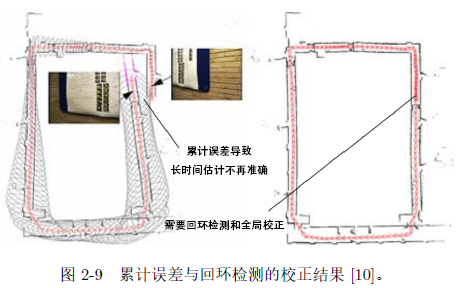
解決漂移問題:后端優化和回環檢測(回環檢測把”機器人回到原始位置“的事情檢測出來,后端優化根據該資訊校正整個軌跡形狀)
后端優化 ?Optimization
后端優化主要處理SLAM程序中的噪聲問題,
后端優化要考慮的問題,就是如何從這些帶有噪聲的資料中,估計整個系統的狀態,以及這個狀態估計的不確定性有多大——這稱為最大后驗概率估計(Maximum-a-Posteriori,MAP),這里的狀態既包括機器人自身的軌跡,也包含地圖,
在視覺SLAM 中,前端和計算機視覺研究領域更為相關,比如影像的特征提取與匹配等,后端則主要是濾波與非線性優化演算法,
SLAM 問題的本質:對運動主體自身和周圍環境空間不確定性的估計,
回環檢測?Loop Closing
回環檢測,又稱倍訓檢測(Loop Closure Detection),主要解決位置估計隨時間漂移的問題,
地圖存在的主要意義,是為了讓機器人知曉自己到達過的地方,為了實作回環檢測,我們需要讓機器人具有識別曾到達過的場景的能力,(eg. 在某個位置放置二維碼,再次識別到它的時候即是回到了原點)
我們更希望能夠通過相機得到的影像本身來完成這一任務,eg.通過判斷影像間的相似性,來完成回環檢測,
建圖?Mapping
建圖(Mapping)是指構建地圖的程序,地圖是對環境的描述,但這個描述并不是固定的,需要視SLAM 的應用而定,例如有的場景只需要知道哪里有障礙物哪里能夠通過,有的場景需要重建三位地圖資訊,
度量地圖 ? Metric Map
度量地圖強調精確地表示地圖中物體的位置關系,通常我們用稀疏(Sparse)與稠密(Dense)對它們進行分類,
我們選擇一部分具有代表意義的東西,稱之為路標(Landmark),那么一張稀疏地圖就是由路標組成的地圖,而不是路標的部分就可以忽略掉, 定位
稠密地圖通常按照某種解析度,由許多個小塊組成,二維度量地圖是許多個小格子(Grid),三維則是許多小方塊(Voxel),(耗費大量的存盤空間,且多數細節無用)一般一個小塊含有占據、空閑、未知三種狀態,以表達該格內是否有物體,當我們查詢某個空間位置時,地圖能夠給出該位置是否可以通過的資訊, 導航 (大規模度量地圖有時會有一致性問題 很小的轉向誤差會導致 物體重疊,地圖失效 )
拓撲地圖 ?Topological Map
拓撲地圖是一個圖 (Graph) ,由節點和邊組成,只考慮節點間的連通性,更強調地圖元素之間的關系,拓撲地圖不擅長表達具有復雜結構的地圖,
難點問題:如何對地圖進行分割形成結點與邊,又如何使用拓撲地圖進行導航與路徑規劃,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/304011.html
標籤:其他
下一篇:HTTP 快取機制