線性方程直接求法——高斯消元法(一)
宣告:僅為個人筆記,相關內容僅供參考,
目錄
- 線性方程直接求法——高斯消元法(一)
- 解決方法思想:
- 一、Gausss順序消元法:
- 二、Gauss-Jordan消元法:
- 代碼實作:
- 注意事項:
對于低階的線性方程組,可用克萊姆法則計算其解,對高階線性方程組,計算量巨大,應采用數值計算方法中的直接法和迭代法,這里介紹直接法,
直接法——不考慮計算程序中的舍入誤差,經有限次數的運算便可求得方程組的準確解的方法,克萊姆法則求解即為直接法,克萊姆法則漸近復雜度為O(n*n!)雖然很穩定但是計算量太大了!我們這里引入其他的方法,過多的文字贅述也大可不必,這里簡單講解一下實作思路就行,
解決方法思想:
一、Gausss順序消元法:
1、化為三角矩陣:將一個非奇異矩陣經過初等行變換得到上或下三角矩陣
2、回代方程求解:上三角從Xn開始回代方程求解,上三角則是X1開始
二、Gauss-Jordan消元法:
相對高斯消元法,它最后得到的線性方程組更易求解,它得到的是一個簡化行列式,
1、化為三角矩陣:將一個非奇異矩陣經過初等行變換得到上或下三角矩陣
2、化為對角型:除對角元素其他都消去為0
示例:求解下面這個方程:
代碼實作:
//注:下面的代碼中并沒有把A矩陣和b矩陣放在一起合成增廣矩陣而是單獨存盤的,其實都一樣
#include<iomanip>
#include<iostream>
using namespace std;
//一個增廣矩陣輸出的函式
void print(double A[], double b[], int n);
//Gauss順序消元法
void GaussSequence_x(double a[], double b[], int n)
{
double temp;
//下面用了一個單獨的X陣列來存盤X的值,目的是為了方便理解
//但其實也沒有這個必要,下面的 GaussSequence_b函式可理解、參考
double* x = new double[n];
//第一步:通過初等行變換將矩陣轉換為上三角矩陣:
for (int i = 0; i < n - 1; i++) //N-1次消元
{
//第i列將首元下的n-i個元素消去
//即在二維陣列中表示為i+1到n-1行i列
for (int j = i + 1; j < n; j++)
{
//先取與首元倍數
temp = a[j * n + i] / a[i * n + i];
//第j這一行元素做初等行變換
for (int k = i; k < n; k++)
{
a[j * n + k] -= temp * a[i * n + k];
}
//增廣矩陣做初等行變換,b矩陣也要做
b[j] -= temp * b[i];
}
}
cout << "上三角矩陣為:" << endl; print(a, b, n);
//回代方程計算
//X從N-1開始計算,第一次回圈便可以可到下面這行代碼的效果
//x[n - 1] = b[n - 1] / a[(n - 1) * n + (n - 1)];
//將外層回圈i的起始條件改為n-2上面的這行代碼可以先寫在外面,更加直觀,但沒必要
for (int i = n - 1; i >= 0; i--)
{
x[i] = b[i];
//N-1行后面操作的每行算的X[i]都要用b[i]減去
//前面操作算出的X和對應A元素乘積和
for (int j = n - 1; j > i; j--)
{
x[i] -= x[j] * a[i * n + j];
}
//最后減去乘積之和之后再除以對角線元素就是對應的X值了
x[i] /= a[i * n + i];
}
for (int i = 0; i < n; i++)
{
cout << "X[" << i + 1 << "]= " << x[i] << endl;
}
for (int i = 0; i < 20 * n; i++) cout << "_"; cout << endl;
delete[]x;
}
//Gauss順序消元法
//和上面是一樣的,唯有不同就是沒有單獨創建一個X陣列,這里自行理解就行
void GaussSequence_b(double a[], double b[], int n)
{
double temp;
//第一步:通過初等行變換將矩陣轉換為上三角矩陣:
for (int i = 0; i < n - 1; i++) //N-1次消元
{
for (int j = i + 1; j < n; j++)
{
temp = a[j * n + i] / a[i * n + i];
for (int k = i; k < n; k++)
{
a[j * n + k] -= temp * a[i * n + k];
}
b[j] -= temp * b[i];
}
}
cout << "上三角矩陣為:" << endl; print(a, b, n);
for (int i = n - 1; i >= 0; i--)
{
for (int j = n - 1; j > i; j--)
{
b[i] -= b[j] * a[i * n + j];
}
b[i] /= a[i * n + i];
}
for (int i = 0; i < n; i++)
{
cout << "X[" << i + 1 << "]= " << b[i] << endl;
}
for (int i = 0; i < 20 * n; i++) cout << "_"; cout << endl;
}
//Gauss-Jordan消元法
//這里也不單獨創建X陣列來存盤未知數,
//而是和上面函式一樣用b陣列來放解得的X值
void GaussJordan_b(double a[], double b[], int n)
{
double temp;
//第一步:通過初等行變換將矩陣轉換為上三角矩陣:
for (int i = 0; i < n - 1; i++) //N-1次消元
{
for (int j = i + 1; j < n; j++)
{
temp = a[j * n + i] / a[i * n + i];
for (int k = i; k < n; k++)
{
a[j * n + k] -= temp * a[i * n + k];
}
b[j] -= temp * b[i];
}
}
cout << "上三角矩陣為:" << endl; print(a, b, n);
//化為對角型
for (int i = n - 1; i >= 0; i--)
{
b[i] /= a[i * n + i];
for (int j = 0; j < i; j++)
{
b[j] -= b[i] * a[j * n + i];
}
}
print(a, b, n);
for (int i = 0; i < n; i++)
{
cout << "X[" << i + 1 << "]= " << b[i] << endl;
}
for (int i = 0; i < 20*n; i++) cout << "_"; cout << endl;
}
int main()
{
int n = 3;
double* b = new double[n] { 3, 1, -7};
double* A = new double[(double)n * n]{ 2,2,3,4,7,7,-2,4,5};
GaussSequence_x(A, b, n);
//GaussSequence_b(A, b, n);
//GaussJordan_b(A, b, n);
delete[]A;
delete[]b;
system("pause");
return 0;
}
void print(double A[], double b[], int n)
{
for (int i = 0; i < n; i++)
{
for (int j = 0; j < n; j++)
{
cout <<left<<setw(15)<< A[i * n + j];
}
cout << left << setw(15) << b[i] << endl;
}
for (int i = 0; i < 20 * n; i++) cout << "_"; cout << endl;
}
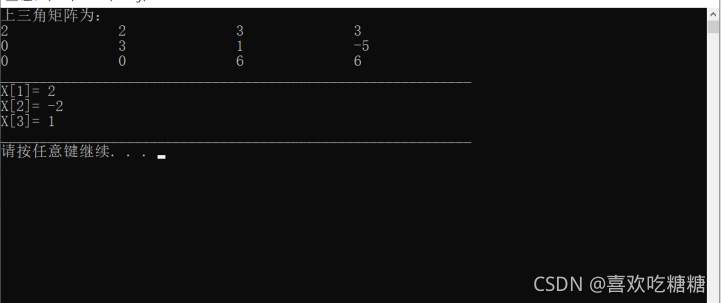
單次運行結果:
注意事項:
(1)每次運算時,必須保證對角線上的元素不為0(即運算中的分母不為0),否則演算法無法繼續進行,
(2)首元如果絕對值很小,由于第k次運算中在分母位置,因此作除數帶來的舍入誤差有時超過預期,從而影響演算法的穩定性,d(X/Y)=(YdX-XdY)/Y^2
(3)漸進復雜度為O(n^3),相比克萊姆法則計算量已經減少很大,但是計算階數比較高的方程時計算量仍很大,
以上問題都有解決方法,后面都會講到,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/306029.html
標籤:其他