目錄
- 實驗緣由
- 一、什么是晶振?晶振頻率與外設時鐘頻率?
- 二、TIM7基本定時器
- 1.設計思想
- 2.代碼
- 3.那些坑~
- 4.演示效果
- 三、SysTick系統定時器
- 1.配置項
- 2.CubeMX的設計思想
- <1>.SysTick系統定時器概述
- <2>.初始化
- <3>.時基?系統心跳?
- ①節拍
- ②節拍頻率
- 3.HAL_Delay函式
- 4.試寫SysTick的us延時函式
- ①對比野火官方的us延時例程
- ②設計思想
- ③代碼
- ④注意事項: 計時下溢
- ⑤演示效果
- 知識小卡片
實驗緣由
和裸機開發不同,在RTOS實時作業系統中,我們需要選取一個定時器作為單片機時基源,成為系統“跑”起來的心跳,在這里,選取M4內核的Systick系統定時器來保持RTOS的心跳,當然,也可以選用其他定時器作為RTOS的心跳,目前許多官方原始碼和軟體都是基于Systick系統定時器做的BSP板級支持包,為了移植的方便,我們就老老實實選它作為單片機的時基源,
同時問題也來了:Systick系統定時器拿去做RTOS的心跳了,原本基于Systick系統定時器的delay_us函式已經不能用了,delay_ms函式也被做成了軟體延時,精度和穩定性都下降了一些,STM32的TIM定時器那么多,我們一般不可能全部用上,完全可以像裸機開發那樣,把TIM拿來硬體定時,做到和Systick一樣的效果,通用定時器和高級定時器功能強大,用來寫延時函式太浪費了,故本篇文章選取基本定時器TIM7(TIM6亦可),
一、什么是晶振?晶振頻率與外設時鐘頻率?
這里拋開那種無意義的介紹不談,單片機可以產生各種各樣的信號,但是,這些信號的產生源頭到底是誰???是它相應的時鐘源!在CubeMX的圖形化界面配置時,可以很清楚地看到,單片機可以選擇自己的系統時鐘源,對它進行各種倍頻,分頻,再分支管理,分配給各個總線上的外設來達到自己的功能需求,沒有時鐘,無論哪個外設都跑不起來,外設的時鐘源來源于系統時鐘源,是其分支管理后的結果,單片機有自己的內部時鐘源,但當選擇外部時鐘來作為自己的時鐘源時,這個角色就是晶振,說白了,晶振就是個時鐘源,與外設時鐘源不同,他是整個系統的時鐘源,
倍頻和分頻,它調整的屬性正是頻率,這里頻率的概念就是物理上頻率的概念,f=1/T,即1s鐘內進行單次操作的次數,T就是進行一次完整操作所需的時間,f越大,T就越小,意味著單片機某個外設進行單次完整操作所需的時間就越少,干活就越快,
注意:本文所說的單位操作是指在特定外設下的運行,
這和我們人體活動類似,人運動越劇烈,心跳就會越快,但人沒有心臟,就沒有生命運作的前提,更不用談運動的快慢了,所以我們常比喻晶振就是單片機的心臟,
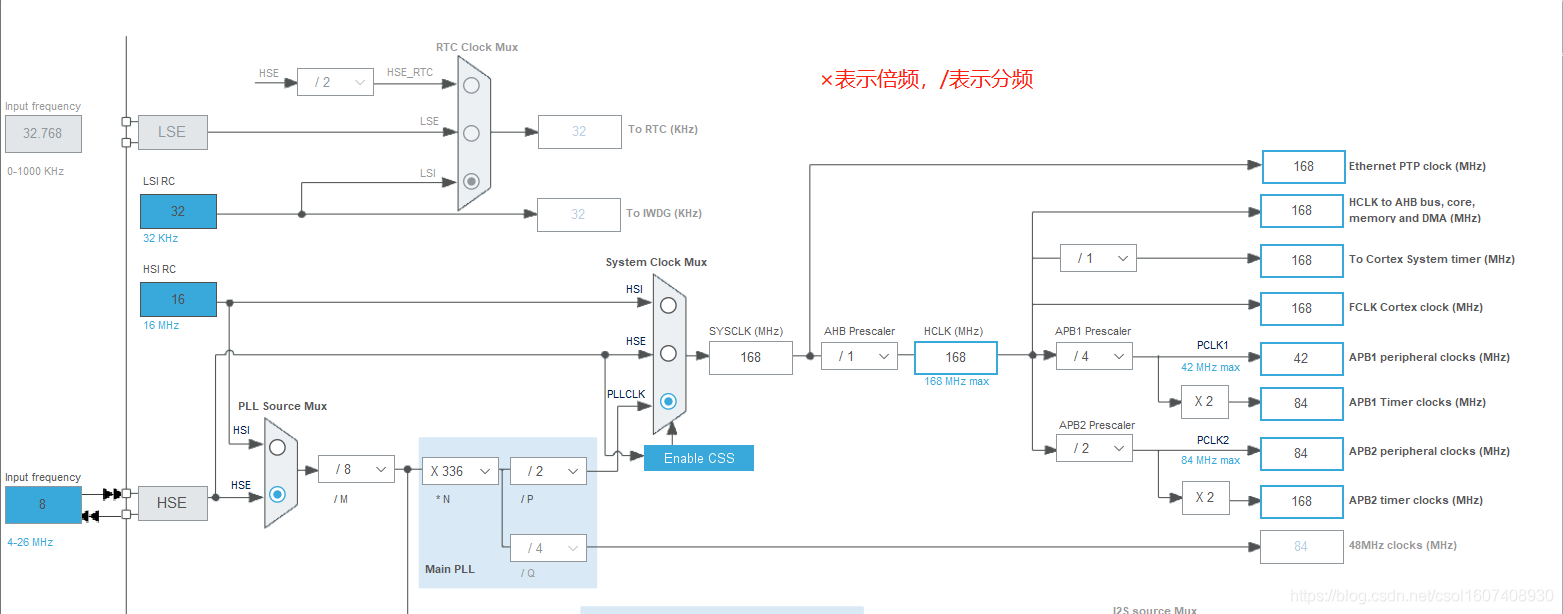 時鐘樹配置情況
時鐘樹配置情況
M(兆)在數字上是指10的6次方,
在了解上述重要概念的基礎上,Systick系統定時器和TIM定時器的運行速度取決于它最終被分配到的時鐘的頻率,Systick系統定時器掛載在AHB總線上,最終得到的時鐘頻率是在168M下進行分頻獲得的,這里不分頻,得到的就是168M的時鐘頻率,

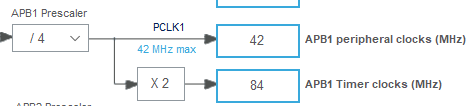
而TIM基本定時器掛載在APB1,是在AP1時鐘頻率下通過倍頻得到的,這里得到了2倍的倍頻系數,最終得到84M的時鐘頻率,顯然Systick系統定時器的運行速度比基本定時器快,
二、TIM7基本定時器
1.設計思想
上文已經提到TIM7獲得的時鐘頻率是84MHz,意味著什么?它1s可以進行單位操作84000 000次!換句話說就是延時1s需要計數84000 000次!而計數一次就是芯片的單位操作之一,如果要做1ms的延時,我們必須讓他計數84000;1us延時,只需要計數84次,
然而基本定時器計數值存盤的暫存器是低16位有效的,意味著65535以上的計數不可行,怎么實作1ms延時?沒事,我們還可以對他進行分頻(通過PSC預分頻器),
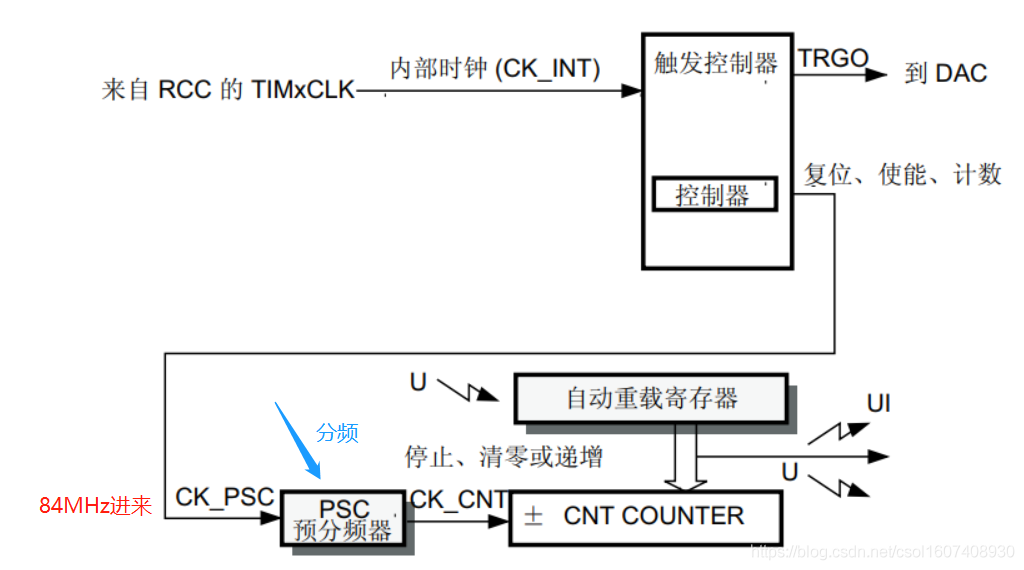
假如我們把84MHz分頻8400,最終得到的就是10000Hz的頻率,那他計數一次不就是100us嗎?計數10次不就是1ms嗎?
在此強調:了解好外設的時鐘分配,運行機制,并進行自主的數學運算非常重要,
其他種類芯片的定時器計算也是按照這個思想進行,
在計數值為10的倍數的原則下,ms的延時函式我們采取8400分頻,計數10次來設計以1ms為單位的毫秒延時;us的延時函式我們采取84分頻,計數1次來設計以1us為單位的微秒延時函式,
這里不需要使用定時器的中斷,理論上若開啟中斷,通過設計可以作為單片機的副時基源,用來解決其他需求,但在這里我們只是為了解決延時函式的空缺,
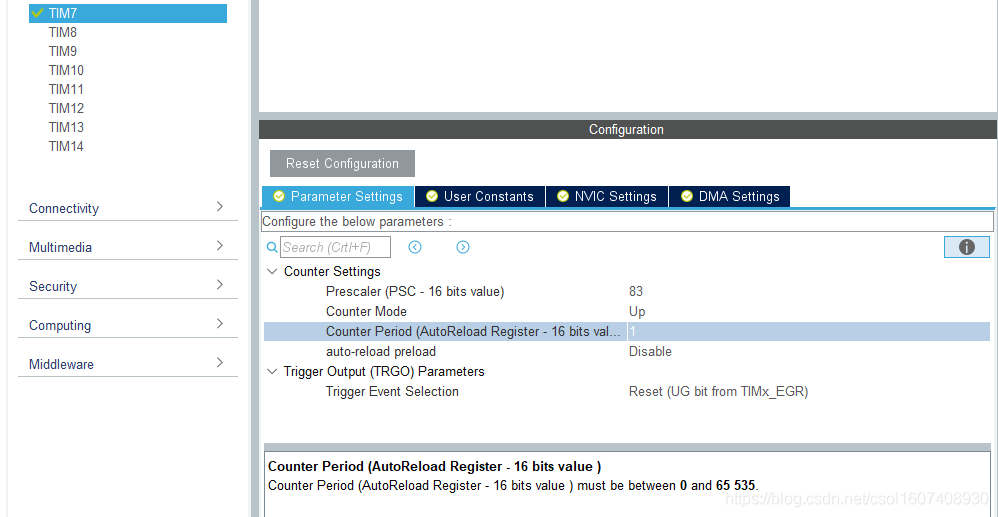 TIM初始化情況
TIM初始化情況
2.代碼
TIM7的初始化
void MX_TIM7_Init(void)
{
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim7.Instance = TIM7;
htim7.Init.Prescaler = 84-1; /*初始化時候的分頻*/
htim7.Init.CounterMode = TIM_COUNTERMODE_UP; /*基本定時器只能向上計數*/
htim7.Init.Period = 65535; /*初始化時ARR為65535*/
htim7.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim7) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim7, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_Base_Stop(&htim7); //TIM7只在要進行延時操作的時候運行
}
us延時函式
void delay_us(uint16_t us)
{
uint16_t compare=(0XFFFF-us-5);
__HAL_TIM_SET_PRESCALER(&htim7,84-1); //重置為84分頻
htim7.Instance->EGR|=0x0001; //軟體觸發更新事件,將重配的分頻值同步到影子暫存器
__HAL_TIM_SetCounter(&htim7,compare); //重置計數值
HAL_TIM_Base_Start(&htim7);
while(compare<0XFFFF-5)
{
compare=__HAL_TIM_GetCounter(&htim7); //輪詢檢查
}
HAL_TIM_Base_Stop(&htim7);
}
為什么是賦值0XFFFF-us-5這個奇怪的數字呢?這就取決于基本定時器的計數方式了,他只能向上計數,這里我們選擇65530(0XFFFF-5)作為基準值,往前倒減所產生的間隔us,就是我們要延時的us時間,
ms延時函式
void delay_ms(uint16_t ms)
{
uint16_t compare=(0XFFFF-10*ms-5);
__HAL_TIM_SET_PRESCALER(&htim7,8400-1); //重置為8400分頻
htim7.Instance->EGR|=0x0001; //軟體觸發更新事件,將重配的分頻值同步到影子暫存器
__HAL_TIM_SetCounter(&htim7,compare); //重置計數值
HAL_TIM_Base_Start(&htim7);
while(compare<0XFFFF-5)
{
compare=__HAL_TIM_GetCounter(&htim7); //輪詢檢查
}
HAL_TIM_Base_Stop(&htim7);
}
這里同樣以65530(0XFFFF-5)作為基準值,但要注意:在8400分頻下,計數一次是100us,計數10次才算1ms,所以這里我們規定以計數10次為單位,所以這個往前倒減的間隔是10*ms;
3.那些坑~
1.為什么分頻比要減1?
硬體是從0開始計數的,而我們人卻習慣于從1開始計數,難免剛開始思想會轉不過來,
試想我們的要求是數10次,從1開始計,到10才算數了10次;
如果從0開始數到10呢?就數了11次,就不滿足數10次的要求,所以要-1
2.要在TIM停止運作時再對它的暫存器值進行修改
3.何為影子暫存器?
預分頻器暫存器 (TIMx_PSC)和自動多載暫存器 (TIMx_ARR)都是影子暫存器,
影子暫存器這個名字取得真是不好理解,我來自定義一下吧:
通俗來說,以PSC預分頻器舉例,它有一個存值暫存器,一個是生效暫存器;生效暫存器不可寫,存值暫存器可寫,生效暫存器他存的值可以立即讓硬體生效作業,而存值暫存器只是存值和供生效暫存器更新(復制過來);在呼叫:
__HAL_TIM_SET_PRESCALER(&htim7,8400-1);
或
__HAL_TIM_SET_PRESCALER(&htim7,84-1);
時,只是更改了存值暫存器的值,生效暫存器的值沒有變,所以即使用了這個函式,TIM還是沒有按照新的分頻比運作,那咋辦?

原來要產生更新事件,但更新事件怎么產生?

從官方手冊可知,要么等待他上溢,要么軟體觸發,但是延時函式我們要即改即用,不能先用原來的分頻等他上溢后再更新,這樣造成的誤差太大了,因此我們自己動手,豐衣足食:
htim7.Instance->EGR|=0x0001; //軟體觸發更新事件,將重配的分頻值同步到影子暫存器
__HAL_TIM_SetCounter(&htim7,compare); //重置計數值
注意:更新事件產生后CNT會自動清0,所以這兩段代碼不能調換位置,
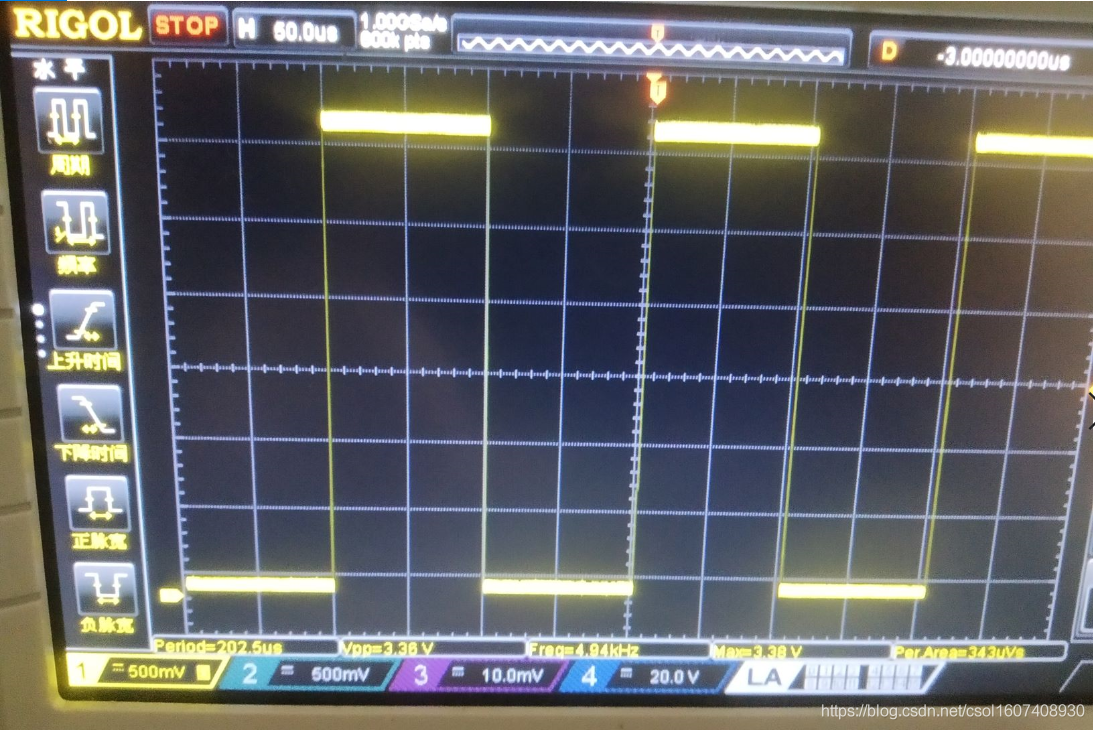
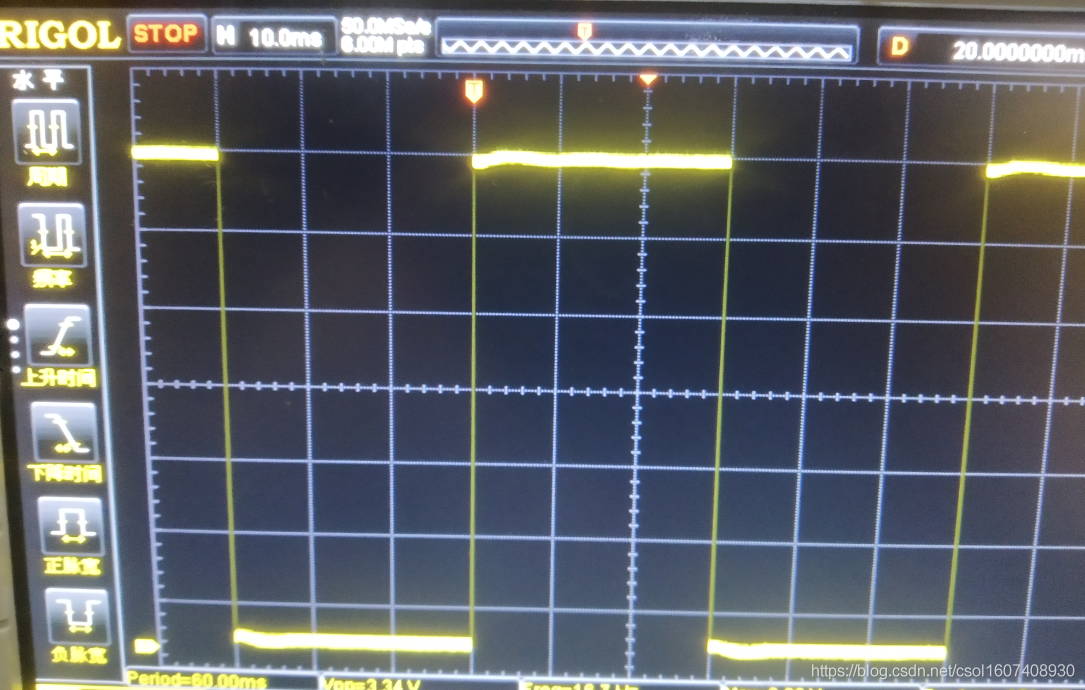
4.演示效果
選取兩個IO進行高低電平跳轉,上下分別為延時100us和30ms的效果
三、SysTick系統定時器
1.配置項
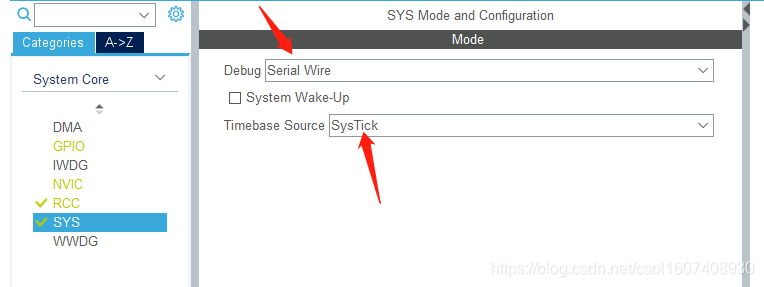 Serial Wire表示SW除錯,如果你的下載介面是JTAG就需要更改,
Serial Wire表示SW除錯,如果你的下載介面是JTAG就需要更改,
時基源Timebase Source選擇SysTick.
2.CubeMX的設計思想
<1>.SysTick系統定時器概述
上文已經介紹到本例SysTick系統定時器獲得的時鐘頻率是168Mhz,與基本定時器不一樣,它向下計數,沒有預分頻器,不能自由選擇自己喜好的分頻系數;而SysTick系統定時器的重裝載暫存器LOAD和計數暫存器VAL是24位的,最大存值為16777215,在LOAD存滿的情況下,最大每進行一次單位操作可達約0.1s,在定時器每次都從LOAD滿值計到0的情況下,根據數學計算,如果單位操作的時間只需要1us,那么LOAD只需要存168即可;要達到單位操作時間長達1ms,LOAD需要存值168000,它小于16777215,所以存得下,對比基本定時器只有16位的有效存值,這里就方便多了,
<2>.初始化
在HAL庫自動生成的代碼中,SysTick系統定時器的初始化是這樣的路徑:
HAL_Init()——>HAL_InitTick(形參)——>HAL_SYSTICK_Config(形參) ——>SysTick_Config(形參)
我們看SysTick_Config就一步到位,
__STATIC_INLINE uint32_t SysTick_Config(uint32_t ticks)
{
if ((ticks - 1UL) > SysTick_LOAD_RELOAD_Msk)
{
return (1UL); /* Reload value impossible */
}
SysTick->LOAD = (uint32_t)(ticks - 1UL); /* set reload register */
NVIC_SetPriority (SysTick_IRQn, (1UL << __NVIC_PRIO_BITS) - 1UL); /* set Priority for Systick Interrupt */
SysTick->VAL = 0UL; /* Load the SysTick Counter Value */
SysTick->CTRL = SysTick_CTRL_CLKSOURCE_Msk |
SysTick_CTRL_TICKINT_Msk |
SysTick_CTRL_ENABLE_Msk; /* Enable SysTick IRQ and SysTick Timer */
return (0UL); /* Function successful */
}
這里我們只關注LOAD和VAL的值,LOAD決定了他的計算周期,進而可以計算出單位操作一次所需的時間;而VAL就是當前的計數值,是我們可以操縱的量,
我們來看默認對他的配置:
SystemCoreClock=168000000; //系統時鐘頻率
uwTickFreq=1;//節拍頻率
HAL_SYSTICK_Config(SystemCoreClock / (1000U / uwTickFreq))
顯然通過這個函式最終傳遞給SysTick_Config的值是168000,所以CubeMX默認生成的SysTick代碼里面設定計數周期為1ms,uwTickFreq節拍頻率的值也會影響計數周期,但我們一般默認讓它為1.
<3>.時基?系統心跳?
我們要選取一款定時器作為時基源,然后用這個定時器產生時基,晶振給單片機提供了心臟,而心臟的心跳,就從時基中來,
上面這句話是不是聽得云里霧里?沒事,聽我慢慢道來:
①節拍
在基本定時器中,沒有開啟中斷,只是拿來做延時函式,而SysTick系統定時器作為時基源,與基本定時器最大的不同,就是開啟了中斷,
問題顯而易見,中斷拿來干什么???
/**
* @brief This function handles System tick timer.
*/
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
void HAL_IncTick(void)
{
uwTick += uwTickFreq;//uwTick是節拍變數
}
SysTick的中斷里面對uwTick進行了以uwTickFreq為單位的累加;一次完整的計數周期是1ms,每1ms產生一次中斷,對uwTick進行累加,可以理解為節拍就是記錄系統到達一個計數周期次數的量,對,它是一個量;
uwTickFreq是節拍頻率,上文已經提到uwTickFreq=1,節拍uwTick累加的幅度取決于節拍頻率uwTickFreq,
普通定時器和時基源,兩者相差的,僅有一個中斷和節拍計算
系統心跳:定時器開啟中斷,并在中斷函式里面記錄它的節拍,節拍的值就是它心跳的次數
②節拍頻率
節拍頻率決定了系統心跳的快慢,它的含義完全可以從頻率的定義去分析
3.HAL_Delay函式
#define HAL_MAX_DELAY 0xFFFFFFFFU
void HAL_Delay(uint32_t Delay)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = Delay;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
{
wait += (uint32_t)(uwTickFreq);//若Delay=0,至少讓他延時一個節拍
}
while((HAL_GetTick() - tickstart) < wait)
{
}
}
CubeMX生成的HAL_Delay(uint32_t Delay)以實時獲取節拍來延時,所以最短延時時間就是它的計數周期,這里為1ms
4.試寫SysTick的us延時函式
①對比野火官方的us延時例程
static __IO u32 TimingDelay;
/**
* @brief 啟動系統滴答定時器, 10us中斷一次
* @param 無
* @retval 無
*/
void SysTick_Init(void)
{
/* SystemFrequency / 1000 1ms中斷一次
* SystemFrequency / 100000 10us中斷一次
* SystemFrequency / 1000000 1us中斷一次
*/
if (HAL_SYSTICK_Config(SystemCoreClock / 100000))
{
/* Capture error */
while (1);
}
}
/**
* @brief us延時程式,10us為一個單位
* @param
* @arg nTime: Delay_us( 1 ) 則實作的延時為 1 * 10us = 10us
* @retval 無
*/
void Delay_us(__IO u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
/**
* @brief 獲取節拍程式
* @param 無
* @retval 無
* @attention 在 SysTick 中斷函式 SysTick_Handler()呼叫
*/
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00)
{
TimingDelay--;
}
}
/**
* @brief 中斷服務函式
* @param 無
* @retval 無
* @attention
*/
void SysTick_Handler(void)
{
TimingDelay_Decrement();
}
野火的官方代碼設計思想和HAL庫生成的代碼設計思想并無二異,不同的只是節拍計數的情景和計數方式;野火的代碼只有在運行延時函式時才進行節拍的計數,而節拍是向下遞減的,但是這樣的設計思想容易誤導新人,下面我們理所當然地試想這樣設計ms延時函式是不是很容易?
/**
* @brief ms延時程式,1ms為一個單位
* @param 無
* @retval 無
*/
void Delay_ms(__IO u32 nTime)
{
while(nTime--)
Delay_us(100);//10*100us=1ms
}
上面的代碼是很典型的阻塞式嵌套,是非常占用CPU的,極易出現系統“卡死”現象
因此這樣的設計思想不可取,試想:Delay_us函式要每10us運行一次,我阻塞了100次才到此1ms.現在我還要進行嵌套阻塞,CPU在Delay_ms函式運行時間的占比就會大大提高,其他操作經常被中斷打斷,導致其他操作的現象出不來,就是這個原因,因為其他操作的運行時間的占比被強制拉低了,還經常被打斷,影響到其他設備的時序初始化也不奇怪,
我們要做的,就是避免純軟體阻塞式的嵌套
②設計思想
1ms延時函式CubeMX默認生成的代碼已經幫我們實作了,為了避免不必要的麻煩,我們不動重裝載暫存器LOAD的值,僅通過修改計數暫存器VAL的值來達到目的,
我們類比上述基本定時器us延時函式的設計思想:168Mhz的頻率下,我們只需要讓SysTick定時器計數168次就可以達到1us的延時效果了,結合它向下計數的特性,我們把最開始獲得的VAL計數值作為基準,在這個值的基礎上往前倒推168的正整數倍,其間隔就是實際總計數值,倍數就是用戶設定的us延時值,
③代碼
void SysTick_us(uint32_t us)
{
uint32_t start_val,real_val,JianGe;
start_val=SysTick->VAL; //把最開始獲得的計數值作為基準值
do{
real_val=SysTick->VAL; //獲取當前值
if(start_val>real_val) //應對計時器提前下溢
{
JianGe=start_val-real_val;
}
else
{
JianGe=SysTick->LOAD+start_val-real_val;
}
}while(JianGe<us*168); //判斷是否到達間隔
}
最后再來看看RT-Thread官方是怎么處理us函式,思路是不是完全一樣???
void rt_hw_us_delay(rt_uint32_t us)
{
rt_uint32_t start, now, delta, reload, us_tick;
start = SysTick->VAL;
reload = SysTick->LOAD;
us_tick = SystemCoreClock / 1000000UL;
do {
now = SysTick->VAL;
delta = start > now ? start - now : reload + start - now;
} while(delta < us_tick * us);
}
④注意事項: 計時下溢
假如我們要延時5us,那么計數間隔就是168×5,但當前計數值是168(作為基準VAL),從168減到0只有168×1個間隔,當計數到0時VAL的值又回到了LOAD的值,這就是計時器提前下溢,那怎么辦?
首先我們不能放棄原本已經記下168×1個間隔,在回到LOAD值的場景下,實際VAL=LOAD-168×4,這兩個間隔累加起來就是168×5;
實際間隔=基準VAL-實際VAL=168-(LOAD-168×4)=168×5-LOAD,
目標間隔=實際間隔+LOAD
在這里可見數學運算的魅力,太直觀了!我們輕易就能知道把LOAD加上就能得到想要的間隔!
腦子瞎想沒用,一張紙一支筆就能解決你的困惑!
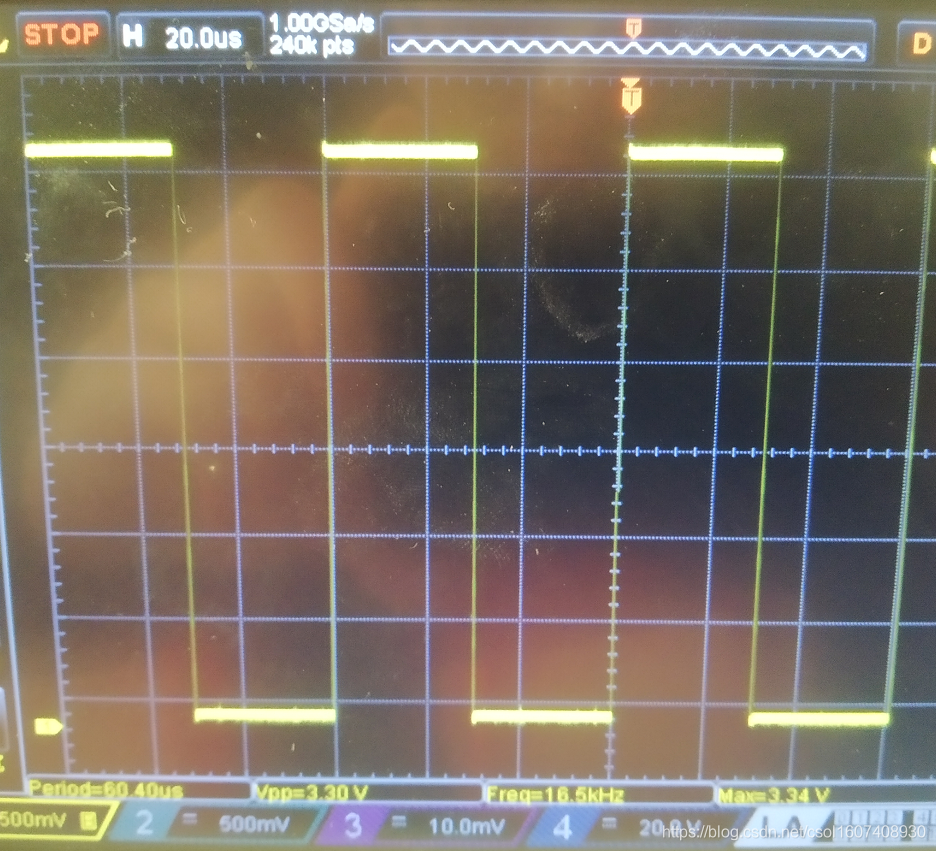
⑤演示效果
以下是延時30us IO口電平跳變的效果
知識小卡片
1.U,L,UL:
U:無符號型資料
L:長整型資料
UL:無符號長整型資料
例如:10UL,說明10這個值是無符號長整型
2.__IO修飾符
__IO其實就是volatile特征修飾符,
在了解這個修飾符之前我們要知道一個事實: 訪問暫存器比直接訪問記憶體快
通常編譯器會對程式進行優化,把變數(如char i)所在記憶體的值先存到單片機的特殊暫存器中,當程式在已知的情況發現變數的值改變時,就會把值重新更新到內部特殊暫存器中,這樣以后我們對變數的讀取就直接從暫存器讀取,
但是遇到未知的情況時,變數值發生了改變,檢測變數的函式卻無法得知,訪問的還是暫存器里的值,也就是變數原來的“備份”,就容易出問題,而中斷函式,就屬于位置情況;RTOS中的執行緒,也會成為未知情況,這時候變數就要做修飾,如 volatile char i;
/**
* @brief us延時程式,10us為一個單位
* @param
* @arg nTime: Delay_us( 1 ) 則實作的延時為 1 * 10us = 10us
* @retval 無
*/
void Delay_us(__IO u32 nTime)
{
TimingDelay = nTime;
while(TimingDelay != 0);
}
/**
* @brief 獲取節拍程式
* @param 無
* @retval 無
* @attention 在 SysTick 中斷函式 SysTick_Handler()呼叫
*/
void TimingDelay_Decrement(void)
{
if (TimingDelay != 0x00)
{
TimingDelay--;
}
}
/**
* @brief 中斷服務函式
* @param 無
* @retval 無
* @attention
*/
void SysTick_Handler(void)
{
TimingDelay_Decrement();
}
上述代碼中,TimingDelay_Decrement()函式在對TimingDelay檢測前并沒有對TimingDelay進行任何寫操作,如果不加__IO修飾,在產生中斷后,TimingDelay遞減后的值不會實時同步到Delay_us()函式中,而在另一個檔案的SysTick_Handler()中斷函式,也不會知道另一個檔案Delay_us()函式對TimingDelay的重新賦值,兩者都在用之前的“備份”值,產生混亂,
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/249102.html
標籤:其他