看前需知:作者本人使用的是四個普通的TT電機加編碼器+增量式PID,適合PID初學者,但是需要對PID和增量式PID有一定的認知,本篇未有詳細介紹,以代碼應用為主,大佬勿噴,
文章目錄
- 一、粗談PID
- 二、使用的硬體設備
- 三、軟體設計
- 四、關鍵代碼
- 1.TIM1定時器:
- 2.TIM2編碼器模式示例:
- 3.電機初始化:
- 4.TIM8PWM輸出:
- 5.PID:
- 6.中斷服務函式:
- 總結
*云中何曾落羽,踏遍三島尋聲*
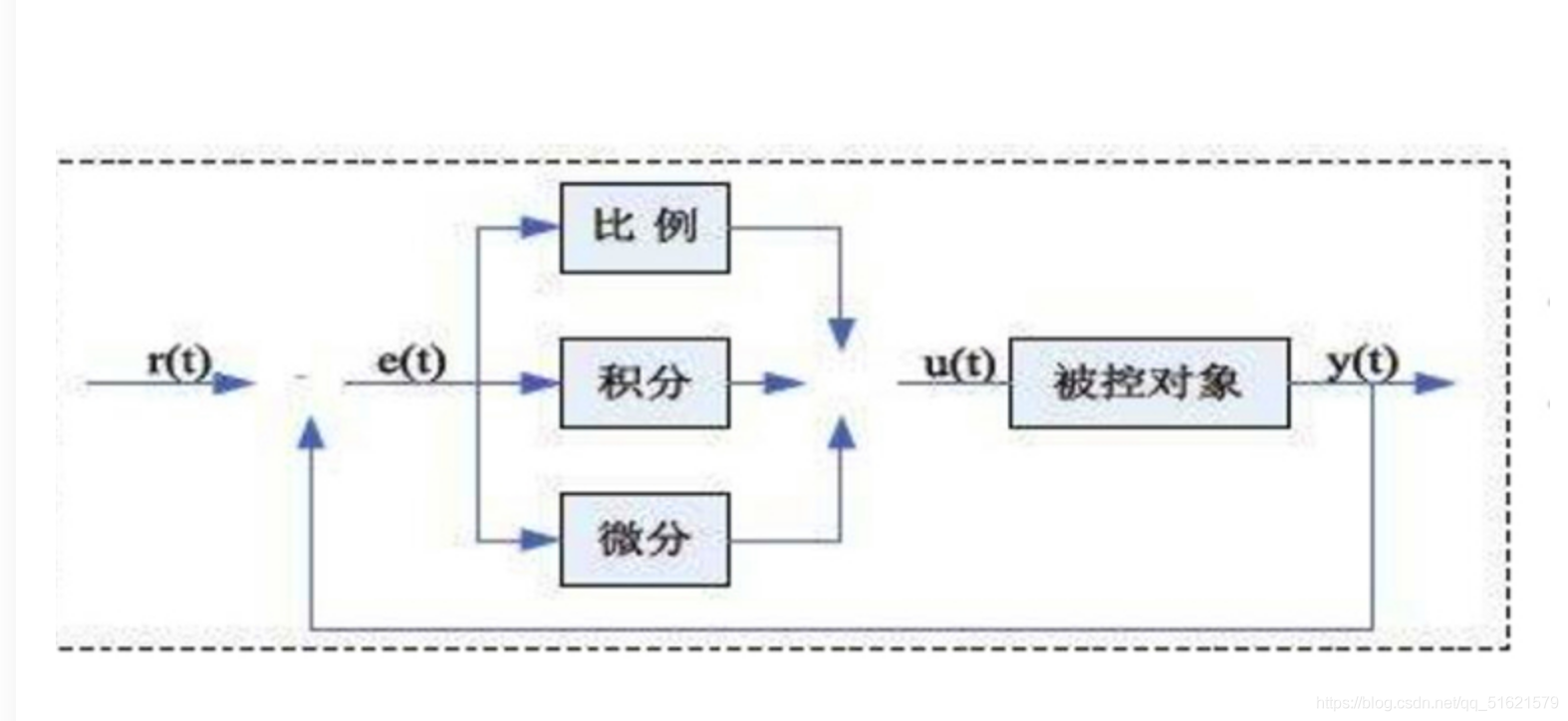
一、粗談PID
PID在生活中很常見,舉個例子,例如生活中,一個加熱器需要對某個物體進行恒溫控制,但是由于某種原因導致溫度過高或者過低,這時候傳感器會回傳相應的資料,告訴控制器應當作出相應的調整,降溫或者是加熱,這就完成了一個簡單的PID的倍訓控制,PID就是修正公式里面的三個系數簡稱,
增量式PID控制將當前時刻的控制量和上一時刻的控制量做差,以差值為新的控制量,是一種遞推式的演算法,
二、使用的硬體設備
1、stm32f103rct6
2、某寶TT電機(小黃電機)+霍爾編碼器
3、兩塊l2980驅動模塊
4、四個18650電池供電
三、軟體設計
1、四個電機分別使用IO口:PB8-PB9、PB10-PB11 、
PB12-PB13 、PB14-PB15,
2、PWM使用高級定時器TIM8的CH1-CH4,所用到的IO口:PC6 PC7 PC8 PC9,
3、四個編碼器對應四個定時器TIM2 TIM3 TIM4 TIM5,開啟自帶的編碼器模式,需同時開啟對應的CH1和CH2,(對應的引腳可查看資料手冊)
4、用TIM1進行中斷計時,
注:TIM2需要完全重映射,因為未重映射時與TIM5的CH1,CH2引腳相同, GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE); 這個禁用也不可忘了!
四、關鍵代碼
1.TIM1定時器:
void Timer_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);
TIM_TimeBaseStructure.TIM_Period = 9999;//自動重新裝載暫存器周期的值澹ㄥ計數值澹)
TIM_TimeBaseStructure.TIM_Prescaler = 719;//時鐘分頻系數
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//對外部時鐘進行采樣的時鐘分頻
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//向上計數
TIM_TimeBaseStructure.TIM_RepetitionCounter=0; //高級定時器1是用定時器功能配置這個才可以是正常的計數頻率一開始的72mhz 值得注意的地方
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseStructure);//引數初始化
TIM_ClearFlag(TIM1, TIM_FLAG_Update);
TIM_ITConfig(TIM1, TIM_IT_Update, ENABLE);
TIM_Cmd(TIM1, ENABLE);//啟動定時器
}
2.TIM2編碼器模式示例:
void Encoder_Init_TIM2(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定時器2的時鐘
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM2, ENABLE);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable , ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //埠配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空輸入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根據設定引數初始化GPIOA
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3; //埠配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空輸入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根據設定引數初始化GPIOA
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x0; // 預分頻器
TIM_TimeBaseStructure.TIM_Period = ENCODER_TIM_PERIOD; //設定計數器自動重裝值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//選擇時鐘分頻:不分頻
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM向上計數
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用編碼器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新標志位
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2, ENABLE);
}
3.電機初始化:
void dj1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能PB埠時鐘
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_11|GPIO_Pin_10|GPIO_Pin_9|GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度為50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //根據設定引數初始化GPIOB
}
4.TIM8PWM輸出:
void PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM8, ENABLE);//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE); //使能GPIO外設時鐘使能
// GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE); //全映射 PC6-9
//設定該引腳為復用輸出功能,輸出TIM8 CH1的PWM脈沖波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9; //TIM_CH1
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_Period = arr; //設定在下一個更新事件裝入活動的自動重裝載暫存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //設定用來作為TIMx時鐘頻率除數的預分頻值 不分頻
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //設定時鐘分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式
TIM_TimeBaseInit(TIM8, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的引數初始化TIMx的時間基數單位
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //選擇定時器模式:TIM脈沖寬度調制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能
TIM_OCInitStructure.TIM_Pulse = 0; //設定待裝入捕獲比較暫存器的脈沖值
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸出比較極性高
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Reset ;
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Disable;
//TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC1Init(TIM8, &TIM_OCInitStructure); //根據TIM_OCInitStruct中指定的引數初始化外設TIMx
TIM_OC2Init(TIM8, &TIM_OCInitStructure);
TIM_OC3Init(TIM8, &TIM_OCInitStructure);
TIM_OC4Init(TIM8, &TIM_OCInitStructure);
TIM_CtrlPWMOutputs(TIM8,ENABLE); //MOE 主輸出使能
TIM_OC1PreloadConfig(TIM8, TIM_OCPreload_Enable); //CH1預裝載使能
TIM_OC2PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC3PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_OC4PreloadConfig(TIM8, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM8, ENABLE); //使能TIMx在ARR上的預裝載暫存器
TIM_Cmd(TIM8, ENABLE); //使能TIM8
}
5.PID:
static double Proportion=0.45; //比例常數 Proportional Const
static double Integral=0.1; //積分常數 Integral Const
static double Derivative=0; //b不采用微分
/********************增量式PID控制設計************************************/
//NowPoint當前輸出值
//SetPoint設定值
int PID_Calc1(int NowPoint,int SetPoint)
{
//微分常數 Derivative Const
static int LastError1; //Error[-1]
static int PrevError1; //Error[-2]
int iError,Outpid; //當前誤差
iError=SetPoint-NowPoint; //增量計算
Outpid=(Proportion * iError) //E[k]項
-(Integral * LastError1) //E[k-1]項
+(Derivative * PrevError1); //E[k-2]項
PrevError1=LastError1; //存盤誤差,用于下次計算
LastError1=iError;
return(Outpid); //回傳增量值
}
int PID_Calc2(int NowPoint,int SetPoint)
{
//微分常數 Derivative Const
static int LastError2; //Error[-1]
static int PrevError2; //Error[-2]
int iError,Outpid; //當前誤差
iError=SetPoint-NowPoint; //增量計算
Outpid=(Proportion * iError) //E[k]項
-(Integral * LastError2) //E[k-1]項
+(Derivative * PrevError2); //E[k-2]項
PrevError2=LastError2; //存盤誤差,用于下次計算
LastError2=iError;
return(Outpid); //回傳增量值
}
int PID_Calc3(int NowPoint,int SetPoint)
{
//微分常數 Derivative Const
static int LastError3; //Error[-1]
static int PrevError3; //Error[-2]
int iError,Outpid; //當前誤差
iError=SetPoint-NowPoint; //增量計算
Outpid=(Proportion * iError) //E[k]項
-(Integral * LastError3) //E[k-1]項
+(Derivative * PrevError3); //E[k-2]項
PrevError3=LastError3; //存盤誤差,用于下次計算
LastError3=iError;
return(Outpid); //回傳增量值
}
int PID_Calc4(int NowPoint,int SetPoint)
{
//微分常數 Derivative Const
static int LastError4; //Error[-1]
static int PrevError4; //Error[-2]
int iError,Outpid; //當前誤差
iError=SetPoint-NowPoint; //增量計算
Outpid=(Proportion * iError) //E[k]項
-(Integral * LastError4) //E[k-1]項
+(Derivative * PrevError4); //E[k-2]項
PrevError4=LastError4; //存盤誤差,用于下次計算
LastError4=iError;
return(Outpid); //回傳增量值
}
6.中斷服務函式:
void dj1_Init(void)
{
int Encoder_Front_Left,Encoder_Front_Right,Encoder_Back_Right,Encoder_Back_Left;
int Left_t,Right_t,Encoder_R,Encoder_L;
int Moto_Front_Left,Moto_Front_Right,Moto_Back_Left,Moto_Back_Right;
int para1,para2,para3,para4;//增量
int SetPoint1=30;//設定目標值單位RPM
int SetPoint2=30;
//使用減速比是1:120的減速箱
#define SetPoint_back SetPoint1*6240/600//換算成編碼器速度,因為最終pid控制的是編碼器的脈沖數量
#define SetPoint_front SetPoint2*6240/600//換算成編碼器速度,因為最終pid控制的是編碼器的脈沖數量
//Time1定時器1中斷服務函式
//200ms定時
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetFlagStatus(TIM1, TIM_IT_Update) != RESET) //時間到了
{
TIM_ClearITPendingBit(TIM1, TIM_FLAG_Update);//清中斷
Encoder_Front_Left=myabs(Read_Encoder(2)); //讀取編碼器
Encoder_Front_Right=myabs(Read_Encoder(3));
Encoder_Back_Left=myabs(Read_Encoder(4));
Encoder_Back_Right=myabs(Read_Encoder(5));
para1=PID_Calc1(Encoder_Front_Left,SetPoint_back); //左電機,計數得到增量式PID的增量數值
para2=PID_Calc2(Encoder_Front_Right,SetPoint_back);
para3=PID_Calc3(Encoder_Back_Left,SetPoint_front);
para4=PID_Calc4(Encoder_Back_Right,SetPoint_front);
if((para1<-3)||(para1>3)) // 不做 PID 調整,避免誤差較小時頻繁調節引起震蕩,
{
Moto_Front_Left +=para1;
}
if(Moto_Front_Left>3500) Moto_Front_Left=3500;//限幅
TIM8->CCR1=Moto_Front_Left;//更新pwm
if((para2<-3)||(para2>3)) // 不做 PID 調整,避免誤差較小時頻繁調節引起震蕩,
{
Moto_Front_Right +=para2;
}
if(Moto_Front_Right>3500) Moto_Front_Right=3500;//限幅
TIM8->CCR2=Moto_Front_Right;
///
if((para3<-3)||(para3>3)) // 不做 PID 調整,避免誤差較小時頻繁調節引起震蕩,
{
Moto_Back_Left +=para3;
}
if(Moto_Back_Left>3500) Moto_Back_Left=3500;//限幅
TIM8->CCR3=Moto_Back_Left;//更新pwm
if((para4<-3)||(para4>3)) // 不做 PID 調整,避免誤差較小時頻繁調節引起震蕩,
{
Moto_Back_Right +=para4;
}
if(Moto_Back_Right>3500) Moto_Back_Right=3500;//限幅
TIM8->CCR4=Moto_Back_Right;//更新pwm
delay_ms(2);
}
}
int myabs(int a)
{
int temp;
if(a<0)
temp=-a;
else
temp=a;
return temp;
}
總結
由于本人為新手,代碼可能顯得冗長,本文關于速度的計算設定就不寫了,可以結合其他大佬博主的文章嘗試理解,需要代碼的可以評論區留言+一鍵三連(嘿嘿嘿),書寫不易,感謝支持,大家一起進步!
轉載請註明出處,本文鏈接:https://www.uj5u.com/ruanti/271409.html
標籤:其他